

3340
.pdfнеобходимостью проведения дополнительной коррекции системы по углу между полем ротора и статора Θ, а также стабилизацией системы.
Процесс управления ЭМС с БДПТ может быть рассмотрен как результат работы некоторого алгоритма Y  f (G, z ) , где G – исходная
f (G, z ) , где G – исходная
информация, на базе которой вырабатываются управляющие функции и команды управления с учетом текущего состояния системы z*. Сущность задачи стабилизации системы при этом сводится к необходимости формирования некоторых прикладываемых к системе управляющих воздействий, обеспечивающих требуемое устойчивое перемещение объекта управления. Задача стабилизации выходной координаты в ЭМС с БДПТ может быть рассмотрена как задача поддержания ее выходных величин вблизи некоторых неизменных значений, несмотря на действие помех и полифакторных внешних воздействий.
Для случая стабилизации, когда в ЭМС с БДПТ ω(t) = const, υ = pωt (где р – число пар полюсов двигателя), задача позиционирования будет заключаться в прохождении заданного угла υ0 за определенное время
|
|
T |
(период) Т из следующего условия |
0 |
p (t)dt . |
|
|
|
|
|
0 |
Поведение ЭМС с БДПТ может в данном |
случае быть описано |
|
переходом от одного состояния в другое, например, от z1 |
к z2 , или от z2 к |
z3 и так далее. В любой произвольный момент |
времени t на |
рассматриваемом интервале Т (t ) поведение системы можно представить
) поведение системы можно представить
как некоторую функцию вида zt = f(zt-1, xt, vt), где zt-1 – состояние,
предшествующее состоянию zt; xt, vt – входная и выходная координаты
соответственно.
При этом также особо отметим, что в ЭМС с БДПТ регуляторы скорости выполняют, как правило, на базе типовых пропорциональных
(П), пропорционально-интегральных (ПИ), пропорционально-интегрально- дифференциальных (ПИД) регуляторов с компенсацией запаздывания. При этом первые два способа являются относительно простыми по технической реализации и до появления микропроцессорной техники были основными. Третий способ, безусловно, является наиболее эффективным, но для ЭМС
с БДПТ в настоящее время его практическая реализация разработана недостаточно подробно.
Следует заметить, что для случаев, когда к ЭМС с БДПТ в
103

соответствии с требованиями технологического режима и условиями эксплуатации предъявляются достаточно жесткие требования по качеству переходных процессов (например, ограничение времени переходного процесса и отсутствие перерегулирования), для синтеза регуляторов системы может быть предложено использование критерия апериодической устойчивости.
При реализации данного метода необходимо обеспечить, чтобы на комплексной плоскости ближайший к мнимой оси корень (полюс)
характеристического уравнения был действительным и отрицательным, а также имел максимальную кратность. В этом случае вполне очевидно, что переходный процесс в системе будет осуществляться практически без перерегулирования, а время переходного процесса является функцией этого корня.
При рассмотрении одноконтурной системы с БДПТ, содержащей
запаздывающее звено с передаточной функцией W ( p) |
K |
3 |
e p запишем |
3 |
|
|
характеристическое уравнение ее передаточной функции
D( p) T T p3 |
(T T ) p 2 |
p (K |
П |
р К |
И |
)К |
Д |
К |
З |
е р , |
1 2 |
1 2 |
|
|
|
|
|
где Т1 , Т2 – электромеханическая и электрическая постоянные времени; КП, КИ, КД, КЗ – коэффициенты П – регулятора, И – регулятора, двигателя и звена с запаздыванием соответственно; τ – суммарное время запаздывания системы. Для сокращения времени выхода на заданный режим переходные процессы при больших отклонениях должны иметь максимальное быстродействие и минимальное перерегулирование. Решение характеристического уравнения при условии равенства р1=р2=р3=рО позволяет добиться максимальной кратности корней. Полученные в процессе проведения исследования соотношения для параметров КП и КИ ПИ – регулятора ЭМС с БДПТ, учтенные при синтезе всей системы, свидетельствуют о повышении качества переходных процессов и обеспечении их монотонности.
С учетом изложенного выше можно также установить, что в реальной ЭМС с БДПТ процесс управления и воздействия среды могут быть как независимые, так и зависимые, если система располагает информацией относительно входного воздействия, включая помехи или оценивает (наблюдает) входное воздействие на интервале времени [0,T].
Поскольку для ЭМС с БДПТ движение системы можно описать дифференциальными уравнениями вида dх(t)/dt = A(t)x(t) + B(t)U(t), где матрицы A(t) и B(t) известны, а вектор состояния системы x(t) непосредственному измерению не доступен, но его можно косвенно оценить через вектор наблюдений системы g(t)= Q(t) x(t), где Q(t) – матрица состава измерений [4].
104

В ЭМС с БДПТ все элементы данной матрицы являются функциями
параметров различных применяемых в системе датчиков. Например,
сигнал с тахогенератора несѐт информацию о частоте вращения. Датчик тока преобразует информацию о величине тока в напряжение и т.д.
Известно, что для получения информации о моменте нагрузке
недостаточно только одной точки наблюдаемости, так как необходима
хотя бы информация о токе и ускорении. Для получения информации о
величине ЭДС также необходимо использовать одновременно несколько
точек наблюдаемости с соответствующей системой датчиков.
Следовательно, для ЭМС с БДПТ задача синтеза стабилизирующего управления с целью компенсации действующих запаздываний является комплексной и также связана с тем, чтобы по результатам производимых в системе измерений наиболее достоверно получить информацию о состоянии рабочих параметров координаты x(t). Управляющая стабилизирующая функция должна при этом формироваться только на основании реального состояния системы.
Отсюда следует то, что по измерениям, проведѐнным на интервале времени [0,Т] необходимо построить такой линейный функционал, который позволил бы восстановить значение x(t), то есть найти такую функцию (t), при которой должно выполняться условие вида
T
 (t)g(t)dt x(t) при t
(t)g(t)dt x(t) при t .
.
0
В процессе проведения исследования было установлено, что в ЭМС с БДПТ при относительно малых по величине запаздываниях влияние на
угловую частоту вращения практически не оказывается, а при увеличении запаздывания происходит некоторое уменьшение частоты автоколебаний.
Система остается работоспособной при величинах запаздывания менее критического, когда режим автоколебаний отсутствует.
Моделирование происходящих в ЭМС с БДПТ процессов, произведенное на математической модели с использованием прикладных программ, свидетельствует о возможности компенсации действующих в системе запаздываний и подтверждает изложенные выше теоретические
результаты.
105
Литература
1.Шиянов А.И. Математическая модель синхронизированного бесконтактного двигателя постоянного тока / А.И. Шиянов, С.А. Винокуров // Современные проблемы информатизации в непромышленной сфере и экономике: Труды 5 Международной электронной науч. конф.─ Воронеж: ЦЧКИ, 2000. ─ С. 73-74.
2.Винокуров С.А. Возможности оптимизации коммутационных процессов рабочего тока в системах управления с бесконтактным двигателем постоянного тока // Электромеханические устройства и системы: Межвузовский сб. науч. тр.─ Воронеж, 1999. ─ С.50-55.
3.Алгоритмизация управления объектами с запаздываниями: Уч. пособие / Л.П. Мышляев, В.П. Авдеев, В.Я. Карташов, М.Б. Купчик.─ Кемерово: Изд-во Кемеровского гос. университета, 1989. ─ 83 с.
4.Смирнов Е.Я. Стабилизация программных движений. ─ СПб.: Изд-во С.-Петербургского
университета, 1997. ─ 308 с.
Получено 17.05.01 |
Воронежский институт МВД России, |
|
Воронежский государственный |
|
технический университет |
106

УДК 519.21
А.Е. Соколов, А.В. Бурковский
СТОХАСТИЧЕСКАЯ МОДЕЛЬ СИСТЕМЫ ХРАНЕНИЯ ДАННЫХ
Рассматривается математическая модель устройства хранения данных и приводятся результаты анализа влияния буферной памяти на быстродействие системы, полученные с помощью разработанной математической модели.
Исследование распределенных систем обработки информации аналитическими методами требует достаточно точного математического описания каждого элемента системы. В то же время математическая модель элемента системы должна обладать простотой, в противном случае аналитический расчет общей модели системы распределенной обработки информации будут невозможен.
Одним из элементов системы распределенной обработки информации является устройство хранения данных. Модель устройства хранения данных в первую очередь должна быть хорошо согласована с моделью ЭВМ, применяемой для описания распределенной системы обработки информации. Устройство хранения данных представляет собой один или несколько физических дисков, подключенных к дисковому контроллеру. Разделы устройства хранения данных, организованные на основе RAID массивов так же следует представлять как отдельные физические диски, обладающие большей скоростью обработки запросов. На скорость выполнения операций чтения существенное влияние оказывает буферная или кэш память – некоторый объем ОЗУ ЭВМ предназначенный для временного хранения данных прочитанных из дисковой подсистемы. При обращении к данным, копия которых находится в буферной памяти, обращение происходит к ОЗУ, а не к дискам за счет чего значительно сокращается скорость доступа.
Рассмотрим конфигурацию системы хранения информации, в которой имеется v жестких дисков с интенсивностью обслуживания j, j=(1..v) условных блоков данных/сек. Каждый жесткий диск содержит nj j=(1..v) областей данных, каждая размером dij i=(1..nj) условных блоков данных. К области данных dij происходят обращения с интенсивностью ij условных блоков данных/сек.
Для буферизации в ОЗУ ЭВМ выделен объем S условных блоков данных. Интенсивность обслуживания буферной памяти Б.
Для исследования распределенной системы обработки информации рассмотрим стационарный режим. Каждый запрос к системе хранения информации приводит к помещению в буферную память блока данных либо обнулению счетчика времени последнего обращения к блоку данных. Таким образом, в буферной памяти происходит обновление блоков данных с интенсивностью =
 . При заполнении буферной памяти из нее освобождается блок с наибольшим временем последнего обращения (алгоритм LRU – last recently used) , кроме того, некоторые ОС реализуют алгоритм освобождения блока буферной памяти со временем последнего обращения, превышающим установленный предел.
. При заполнении буферной памяти из нее освобождается блок с наибольшим временем последнего обращения (алгоритм LRU – last recently used) , кроме того, некоторые ОС реализуют алгоритм освобождения блока буферной памяти со временем последнего обращения, превышающим установленный предел.
В стационарном режиме работы объем выделенной буферной памяти для области данных dij прямо пропорционален интенсивности обращения к области данных
sij=S ij/ .
Эта формула будет справедлива для областей данных, которые не помещаются полностью в буферную память (dij>sij). Для того, чтобы учесть выделенные области буферной памяти, в которые полностью укладываются в выделенную буферную память разобьем множество дисковых областей данных на два подмножества H и L. В подмножество H входят только те области данных, которые благодаря интенсивности обращений полностью укладываются в буферную память, в подмножество L входят все остальные области данных. Вероятность выборки данных из буферной памяти при обращении к системе хранения информации
107

pБIJ =sij/dij,
где
|
dij , |
для (i, j) |
H |
|
sJI |
(S |
dkl ) |
ij |
, для (i, j) L |
|
||||
|
||||
(kl ) H
kl
(kl ) L
Полагая, что поток запросов пуассоновский вычислим характеристики системы хранения информации.
Интенсивность обработки запросов буферной памятью Би среднее время обработки запроса буферной памятью TБ
v |
n j |
|
|
|
|
|
1 |
|
|
|
pБij |
TБ |
|
|
|
||
Б |
ij |
|
|
|
|
|||
|
|
|
|
|||||
j |
1 i 1 |
|
|
|
|
Б |
Б |
|
Интенсивность обращения к жесткому диску Дj, среднее время обработки запроса диском TДj |
||||||||
ni |
|
|
|
|
1 |
|
|
|
|
(1 pБij ) |
ij Tдj |
|
|
|
|
|
|
Дj |
|
|
|
|
. |
|
||
|
|
|
|
|
||||
i 1 |
|
|
|
Дj |
|
Дj |
|
|
Среднее время обработки запроса к области данных dij
Tij  pБijTБ (1 pБij )TДij .
pБijTБ (1 pБij )TДij .
Приведем некоторые результаты анализа системы хранения из одного диска информации с интенсивностью обслуживания д1=100 условных блоков в секунду, интенсивность обслуживания буферной памятью Б=10000 условных блоков в секунду. Размер области данных отложен по оси Х и изменяется от 10 до 100 условных блоков, размер буферной памяти 10 условных блоков. На рис 1 приведены графики для интенсивности запросов от 1 до 90 условных блоков в сек.
108
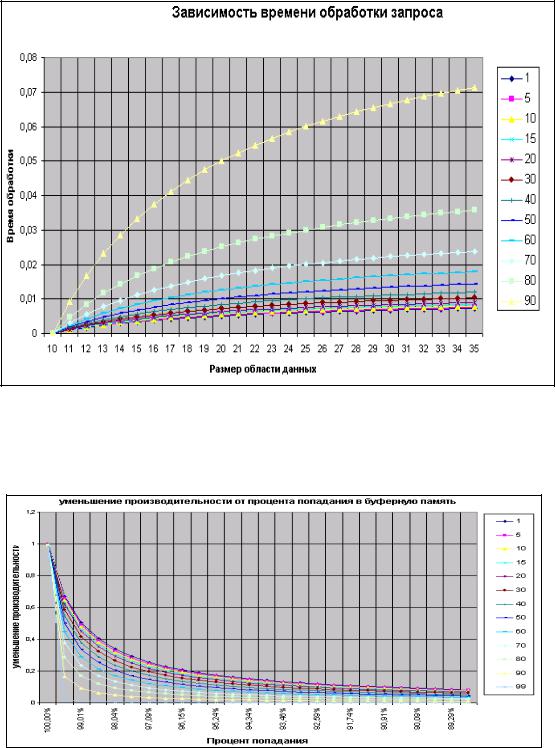
Рис. 1. Зависимость времени обработки запроса
Рис. 2. Зависимость быстродействия от процента попадания
в буферную память
109
Из рис. 1 видно, что при размере области данных в 3 раза превышающей размер выделенной буферной памяти влияние буферная память на быстродействие практически не оказывает. На рис. 2 приведена зависимость уменьшения быстродействия от процента попадания в буферную память для тех же условий. Из рис. 2 видно, что при уменьшении процента попадания в буферную память быстродействие уменьшается минимум в два раза.
Получено 10.09.01 |
Воронежский государственный |
|
технический университет |
|
ООО ―Сократ-интегро‖ |
110
УДК 658.012
А. А. Жданов, М. А. Ильичев ИДЕНТИФИКАЦИЯ СОСТОЯНИЯ КОМПЛЕКСНОЙ
СИСТЕМЫ БЕЗОПАСНОСТИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ЕГО НЕЧЕТКОГО ОПИСАНИЯ
Рассматриваются особенности построения детерминированного и нечеткого описания системы охраны объекта. Предложена нечеткая модель комплексной системы безопасности, на основе которой разработана процедура идентификации возможных состояний системы. Приведен вариант двухпараметрического представления формы функции принадлежности параметров модели.
Комплексные системы безопасности (КСБ) как объекты управления характеризуются рядом особенностей: во-первых, управление КСБ необходимо осуществлять с учетом постоянной адаптации к условиям внешней среды, носящей социальный характер; во-вторых, уровень эффективности КСБ определяется на этапе ее проектирования, зависящей в значительной степени от текущего состояния нормативной базы и опыта проектировщика. К сожалению, существующие нормы являются частными и разработаны по каждому элементу системы в отдельности, без учета их совместного использования. Кроме того, на сегодняшний день отсутствуют модели безопасности объектов и, как результат, комплексные критерии качества функционирования систем управления ими.
Наличие исходных данных как детерминированного, так и стохастического характера, предполагает использование двух типов моделей: детерминированных и нечетких. При этом описанию подлежат свойства объектов управления (охраны) и условия функционирования системы управления (охраны). При выборе методов моделирования необходимо соблюдать требования взаимосвязанности перечисленных типов моделей с целью обеспечения возможности их совместного использования в условиях ограниченного объема априорных данных о возможных состояниях объекта. моделирования. Учет этого требования может быть достигнут за счет использования математического аппарата нечетких множеств, позволяющего описать не только требования нормативно-технических документов (эталонная идеальная модель), но и дать текущую оценку состояния объекта охраны, зависящую, в свою очередь от состояния элементов системы его комплексной безопасности.
Разработанные на данный момент методы формализации описания директивных логических утверждений в нормативно-технических документах и описания функционирования детерминированных систем в компактной форме базируются, в основном, на использование математического аппарата четких множеств [1]. Нечеткие модели безопасности рассматриваются лишь для описания классификационных моделей. При этом понятие нечеткости относится к классам объектов, то есть оценивается только степени возможности принадлежности, промежуточные между полной принадлежностью и полной не принадлежностью, объекта к определенным классам (категориям) [2].
С целью оперативного определения наиболее вероятного состояния объекта охраны по нескольким информативным признакам предлагается расширить область приложения математического аппарата, изложенного в [3], применительно к задачам описания подсистем комплексной безопасности.
Пусть моделируемая система определяется совокупностью множеств
P(U ) |
X1 , X 2 |
,..., X N |
(1) |
|
P(V ) |
Y1 ,Y2 ,...YM |
|||
|
||||
где U – конечные входное пространства объекта моделирования; V – множество его возможных состояний.
В этом случае задача идентификации состояния модели сводится к построению функции отображения {Xi} { Yj }, i=1…N, j=1…M.
Рассмотрим параметры Xi, Yj как нечеткие множества, то есть множества, характеризующиеся совокупностью пар вида
X i |
{U , |
X |
(u)} |
|
|
|
|
|
i |
|
(2) |
Y j |
{V , |
|
(v)} |
||
Y |
|
||||
|
|
j |
|
|
|
111
где u U – координаты пространства параметров объекта моделирования; v V – координаты пространства состояний объекта моделирования; X, Y – функции принадлежности, определяемые как степень принадлежности элемента данному множеству, задаваемая числом из интервала [0;1]:
Xi
Y j
(u) :U 0;1
(3)
(v) :V 0;1
при этом границы интервала означают, соответственно, "принадлежит" и "не принадлежит".
Пусть указанные координаты формируют лингвистические переменные, описываемые тройками вида:
X 0 |
X k ,U |
|
~ |
|
, X k |
T * (u), i |
1...N, k 1...K |
|
|
|
Xi |
, X |
i |
|
|
||||||
j |
i |
|
|
i |
i |
|
|
(4) |
||
Y 0 |
Y l ,V |
~ |
|
, Y l |
T * (v), j 1...M , l 1...L |
|
||||
|
|
|
||||||||
,Y |
j |
|
|
|
||||||
j |
j Yj |
|
|
j |
j |
|
|
|
|
|
где T*i(u), T*j(v) – расширенные терм-множества |
переменных |
"Параметр" |
и |
"Структура" |
||||||
соответственно. |
|
|
|
|
|
|
|
|
|
|
Отсюда множество параметров и структур будет иметь вид:
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
X i |
|
|
X |
i |
(u) / u, i |
1...N |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
U X i |
|
|
|
|
|
|
(5) |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Y j |
|
Y |
j |
(v) / v, j |
1...M |
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
VY j |
|
|
|
|
|
|
|
|
Для конструктивного применения теории нечетких множеств необходимо определиться с видом |
|||||||||||
функции |
X |
i |
(u) / u . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В случае двухпараметрического представления формы функции принадлежности, например, |
|||||||||||
нормальной функцией, эта функция имеет вид: |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
ui |
|
|
|
|
ui u0 |
(6) |
|
|
|
|
|
|
|
1,44 |
2 |
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
0.5 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
2 |
- ширина функции принадлежности по уровню 0.5; u0 – доминирующий элемент нечеткого |
||||||||||
0.5 |
||||||||||||
множества Исходными данными для определения параметров распределения может являться описание
объекта в виде детерминированной модели на основании требований нормативных документов или полученных экспертным путем. В этом случае функция (6) выполняет роль оператора "размытия" исходной четкой модели объекта [2].
С учетом всего выше изложенного моделируемый объект может быть описан нечетким уравнением:
Y R(A1(x),A2(y)) |
|
X |
(7) |
или |
|
|
|
Y (v) max min X |
u , |
R u, v |
(8) |
U X |
|
|
|
где R(A1(x),A2(y)) – нечеткое бинарное отношение на U |
V; |
– операция максиминной композиции Заде. |
|
Так как с точки зрения важности при определении структуры модели объекта переменные Xi являются неравнозначными (ряд параметров способны нести большую информационную нагрузку по сравнению с другими), необходимо провести операции выделения и ранжирования групп исходных данных. Для этого каждому элементу входного пространства ставится в соответствие степень его влияния на результат идентификации, определяемая экспертным путем. Величина ранга r может
112