

3340
.pdfпринимать любое положительное значение, при этом нормальное влияние классифицируется как единичная степень, а повышенное или пониженное – как большая или меньшая единицы соответственно.
Далее выполняются операции ранжирования входных множеств:
концентрирования (r>1) или растяжения (r<1):
~ r
X i
~ r
X i
~
CON ( X i )
~
DIL( X i )
( Xi (u))r / u
U X i
(9)
( Xi (u))r / u
U X i
Тогда совокупное нечеткое выходное множество является результатом объединения исходных множеств с учетом (9):
~ |
~ r |
|
|
~ r |
|
|
|
~ r |
|
|
|
|
|
|
|
|
||||||||
X |
X |
1 |
|
|
X |
2 |
|
|
X |
N |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
{[ X |
1 |
(u)]r |
|
[ |
|
X |
2 |
(u)]r |
[ |
|
X |
N |
(u)]r |
}/ u |
(10) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[ X |
1 |
(u)]r |
|
|
[ |
X |
2 |
(u)]r [ X |
N |
(u)]r |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(11) |
|||
|
|
|
|
|
|
|
|
(u)]r ,[ |
|
|
|
|
(u)]r , ,[ |
|
|
|
(u)]r } |
|
||||||
min{[ |
|
X |
1 |
|
X |
2 |
|
X |
N |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для получения текущего значения структуры моделируемого объекта, соответствующей заданному набору выходных параметров, воспользуемся правилами условного логического вывода. Для этого
сформируем бинарное отношение R(A1(x),A2(y)) в виде:
|
|
|
|
R(A1 (x), A2 (y) (A V) (U B) (A V) (U C) |
(12) |
||
где А, B, C – некоторые высказывания вида "если А – то В – иначе С". Следуя приведенным выше рассуждениям, для нахождения
нечеткого множества, характеризующего структуру модели необходимо построить функции принадлежности нечетких переменных и воспользоваться идеей композиционного вывода Заде.
Для задания таблицы бинарных соотношений необходимо воспользоваться правилами логического вывода, вид которых будет
зависеть от принятой логической базы.
Литература
1.Рольф М. Основы построения систем охранной сигнализации.– М.:
ВЦП, 1984.– 71 с.
2.Шепитько Г.Е. Проблемы охранной безопасности объектов. Часть
1.– М.: Русское слово, 1995.– 352 с.
3.Нечеткие множества и теория возможностей. Последние достижения / Под ред. Р.Ягера.– М.: Радио и связь,1986.– 391 с.
Получено 25.04.01 |
Воронежский институт МВД России |
113

УДК 62-83:31.291
Ю.М. Фролов, А.Г. Медведев
СТРУКТУРНЫЕ СХЕМЫ ДЛЯ МОДЕЛИРОВАНИЯ ОБОБЩЕННОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ В ПРОГРАММЕ MICRO-CAP V
Приводятся структурные схемы и их описание, позволяющие реализовать моделирование обобщенной электрической машины с учетом состояния магнитной системы.
Возможность применения программы Micro-Cap V /1/, предназначенной для расчета радиоэлектронных цепей, для моделирования электропривода обусловлена наличием в нѐм встроенных компонентов laplace sources (лапласовских источников), которые описываются уравнениями, аналогичными элементам структуры электропривода. К числу наиболее приемлемых компонентов для моделирования структурных схем электропривода следует отнести: лапласовский источник напряжения, управляемый напряжением (LFVofV), моделирующий звено, представленное передаточной функцией в лапласовской форме записи; источник напряжения (VofV), позволяющий моделировать пропорциональный коэффициент передачи (усилительное звено); табличный источник напряжения (NTVofV) описывающий функциональную зависимость посредством кусочно-линейной аппроксимацией; функциональный источник напряжения (NFV), имитирующий функцию пользователя, которая определяет вид зависимости выходного напряжения от входного.
Важным этапом при синтезе и анализе систем электропривода является разработка модели электрической машины, отвечающей задачам
управления.
Условно принимают, что параметрам обмоток статора присваивается индекс 1, обмоток статора – индекс 2, а взаимная индуктивность между обмотками имеет индекс 12. Тогда в координатных осях U,V уравнения электрического равновесия и электромагнитного момента для обобщенной электрической машины с равномерным воздушным зазором /2/, что характерно для асинхронного двигателя. Уравнения асинхронной машины с учетом насыщения магнитной цепи /3/ записываются в следующем виде:
U1v |
(R1 |
pL1(Iμ ))i1v |
pL12 (Iμ )i2v |
L1(Iμ )ωki1u |
L12 (Iμ )ωki2u |
|
|
U1u |
(R1 |
pL1(Iμ ))i1u |
pL12 (Iμ )i2u |
L1(Iμ )ωki1v |
L12 (Iμ )ωki2v |
|
|
U2u |
(R 2 |
pL2 (Iμ ))i2u |
pL12 (Iμ )i1u |
L12 (Iμ )(ωk |
ωэл )i1v |
L2 (Iμ )(ωk |
ωэл )i2v |
U2v |
(R 2 |
pL2 (Iμ ))i2v |
pL12 (Iμ )i1v |
L12 (Iμ )(ωk |
ωэл )i1u |
L2 (Iμ )(ωk |
ωэл )i2u |
M |
pn L12 (Iμ )(i1vi2u i1ui2v ), |
|
|
|
|
||
где R1, R2 – активное сопротивление статора и ротора соответственно; L1, L2 – полные индуктивности статора и ротора соответственно; L12 –
114

индуктивность контура намагничивания; к – угловая скорость вращения координат; эл=Pп ротора – угловая скорость перемещения ротора двигателя в электрических градусах; p – оператор дифференцирования; Pп
ротора – угловая скорость перемещения ротора двигателя в электрических градусах; p – оператор дифференцирования; Pп
– количество пар полюсов.
Уравнения электрического равновесия в цепях обмоток статора имеют одинаковый общий вид, поэтому модели обеих обмоток статора имеют идентичную структуру. То же самое можно сказать о моделях обмоток ротора. Для получения представления о функционировании созданной структурной модели достаточно рассмотреть схемное описание одного уравнения электрического равновесия в цепи обмотки статора и в цепи обмотки ротора, также уравнения, описывающего взаимосвязь между механическими и электрическими координатами обобщѐнной электрической машины. Структурная схема, моделирующая зависимость взаимной индуктивности от тока намагничивания обобщѐнной электрической машины L12(I ) , с входящими в неѐ компонентами описана в /4/. Рассмотрим схемное описание уравнения электрического равновесия в цепи обмотки статора U1v .
Структура канала, моделирующего уравнение электрического равновесия в цепи обмотки статора, питающейся напряжением U1v, (1), и преобразован-ного к форме (2), представлена на рис. 1.
U1v |
(R1 |
p L1 (I )) |
i1v p |
L12 (I ) |
i2v |
L1 (I ) ωk |
i1u |
L12 (I |
) |
ωk i2u , |
(1) |
- i1v |
R1 |
p L1 (I ) i1v |
U1v |
p L12 (I |
) |
i2v (L1 (I ) |
i1u |
L12 (I |
) |
i2u ) ωk . |
|
|
p L1 (Iμ ) i1v |
U1v - i1v R1 |
p L12 (Iμ ) i2v |
(L1 (Iμ ) i1u |
L12 (Iμ ) i2u ) ωk . |
||||||
|
|
|
|
|
|
|
|
|
|
|
(2) |
Рис. 1. Структурная модель обмотки статора с учетом насыщения магнитной цепи обобщѐнной электрической машины
115

Напряжение питания обмотки статора U1v=0 моделируется компонентом «земля». На выходе компонента х12 получаем сигнал,
равный p L12 (iμ ) |
i2v , |
|
который получается из сигнала p i2v , приходящего на его вход из канала, питающегося напряжением U 2v . |
||
|
На выходе компонентов х19 и х20 получаются произведения сигналов, приходящих на их входы, i2u L12 (iμ ) |
|
и i1u |
L1 (iμ ) соответственно, которые затем складываются компонентом х18. С выхода х18 сумма произведений |
|
i2u |
L12 (iμ ) i1u |
L1 (iμ ) поступает на компонент х15, который умножает ее на постоянную величину к. |
Компонент х14 производит масштабирование сигнала i1v в зависимости от величины сопротивления обмотки cтатора обобщѐнной электрической машины. Сигнал на его выходе равняется произведению i1v  R1 .
R1 .
Компоненты х11 и х13 осуществляют алгебраические действия с переменными правой части уравнения (2), поступающими на их входы, в результате чего на выходе компонента х13 получается сигнал, равный левой части уравнения
(2): i1v  p
p  L1 (iμ ) .
L1 (iμ ) .
Компонент х16 делит сигнал, поступающий с выхода компонента х13, на величину индуктивности обмотки статора
L1 (iμ ) для получения сигнала i1v  p , который требуется в канале, питающемся напряжением U2v.
p , который требуется в канале, питающемся напряжением U2v.
На выходе компонента х17 получается сигнал i1v , который требуется в нескольких каналах схемы.
Структура канала, моделирующего уравнение электрического равновесия в цепи обмотки ротора, питающейся напряжением U2v, (3) преобразованного к форме (4) представлена на рис.2.
U2v (R2 |
p L2 (I )) i2v |
p L12 (I |
) i1v |
L12 (I |
) (ωk |
ωэл ) i1u L2 (I |
) i2u (ωk |
ωэл ) |
(3) |
|||||||
- R 2 |
i2v |
p |
L2 (I |
) i2v |
U2v |
p |
L12 (I |
) i1v |
(L12 (I |
) i1u |
L2 (I |
) |
i2u ) |
(ωk |
ωэл ) |
|
p |
L2 (I |
) |
i2v |
U2v - R 2 |
i2v |
p |
L12 (I |
) i1v |
(L12 (I |
) i1u |
L2 (I |
) |
i2u ) |
(ωk |
ωэл ) |
(4) |
Напряжение питания обмотки ротора U2v=0 моделируется компонентом «земля».
На выходе компонента х31 получаем сигнал, равный произведению p  L12 (iμ )
L12 (iμ )  i1v , который получается из
i1v , который получается из
сигнала p  i1v , приходящего на его вход из канала, питающегося напряжением U1v .
i1v , приходящего на его вход из канала, питающегося напряжением U1v .
На выходе компонентов х40 и х41 имеем произведения сигналов, прихо-дящих на входы этих компонентов,
i1u L12 (iμ ) и i2u |
L2 (iμ ) соответственно, которые затем суммируются компонентом х39. С выхода компонента |
|
х39 сумма i1u |
L12 (iμ ) |
i2u L2 (iμ ) поступает на компонент х37, который умножает ее на |
разность (ωk |
ωэл ) , приходящую с выхода компонента х38. |
|
116

Рис. 2. Структурная модель обмотки ротора с учетом насыщения магнитной цепи обобщѐнной электрической машины
Компонент х58 преобразует механическую скорость вращения ротора обобщѐнной электрической машины в электрическую в зависимости от числа пар полюсов.
Компонент х34 производит масштабирование сигнала i2v в зависимости от величины сопротивления обмотки cтатора обобщѐнной электрической машины. Сигнал на его выходе равняется произведению i2v  R 2 .
R 2 .
Компоненты х32 и х33 осуществляют алгебраические действия с переменными правой части уравнения (4), поступающими на их входы, в результате чего на выходе компонента х33 получается сигнал, равный левой части уравнения (4)
i2v  p
p  L2 (iμ ) .
L2 (iμ ) .
Компонент х35 делит сигнал, поступающий с выхода компонента х33, на величину индуктивности обмотки ротора L2 (iμ )
для получения сигнала i2v  p , который требуется в канале, питающемся напряжением U1v.
p , который требуется в канале, питающемся напряжением U1v.
На выходе компонента х36 получается сигнал i2v , который используется в нескольких каналах схемы.
Рассмотрим схемное описание уравнения (5), объединяющего механические и электрические координаты обобщѐнной электрической машины, представленное на рис. 3 с учетом кривой намагничивания.
M pn L12 (iμ ) (i1v i2u i1u i2v ) |
(5) |
117

Рис. 3. Структурная модель канала, связывающего механические
иэлектрические координаты обобщѐнной электрической машины
сучетом нелинейности кривой намагничивания
Компонент х33 перемножает сигналы i1v и i2u, поступающие на его входы из каналов, питающихся напряжениями U1v и U2u соответственно.
Компонент х19 перемножает сигналы i1u и i2v, поступающие на его входы из каналов, питающихся напряжениями U1u и U2v соответственно.
Компонент х24 вычисляет алгебраическую разность сигналов, поступающих на его входы i1v i2u |
i1u i2v . |
Компонент х25 масштабирует сигнал, поступающий с выхода компонента х24, в зависимости от числа пар электрической машины.
Компонент х26 умножает сигнал с выхода х25 на величину взаимной индуктивности обобщѐнной электрической машины. Сигнал на его выходе соответствует электромагнитному моменту обобщѐнной электрической машины, то есть левой части уравнения (3.13).
Компонент V5 – импульсный источник напряжения в совокупности с компонентом х34 моделирует момент нагрузки на валу обобщѐнной электрической машины.
На выходе компонента х31 получается значение скорости вращения ротора обобщѐнной электрической машины . Данная переменная необходима для функционирования каналов, моделирующих уравнения электрического равновесия в цепях обмоток ротора обобщѐнной электрической машины. Разработанная полная структурная схема электромеханической системы, включающая рассмотренные каналы обмоток статора, ротора и электромагнитного момента, позволяет проводить анализ переходных процессов, происходящих в электромеханических системах. Ниже приводятся переходные характеристики по току статора I1(t), току ротора I2(t), току намагничивания I (t), скорости и моменту двигателя 4А80В6Y3 в одномассовой электромеханической системе с моментом инерции J=2Jp=0,0092 кг*м2 при пуске с нагрузкой , приложенной к валу двигателя в виде статического момента Мс=Мн=11,4 Н*м.
I1(t)
I (t)
I2(t)
I2
118

Рис. 4. Ток статора I1(t), ток ротора I2(t) и ток намагничивания I (t) (А) в одномассовой электромеханической системе
Рис. 5. Скорость (t) (с-1) в одномассовой электромеханической системе
Рис.6. Момент двигателя М(t) (Н*м) в одномассовой электромеханической системе
Следует отметить, что приведѐнные переходные процессы в электромеханическом преобразователе энергии протекают с переменной электромагнитной постоянной времени, поскольку в разработанной математической модели учитывается состояние его магнитной системы.
119
Литература
1. Разевиг В.Д. Система схемотехнического моделирования MicroCap 5. М.:Солон, 1997. 280 с.
2.Уайт Д. Электромеханическое преобразование энергии/Д.Уайт, Г. Вуд-сон. М.-Л.: Энергия, 1964. 528 с.
3.Копылов И.П. Математическое моделирование электрических машин. М.: Высшая школа, 1994. 318 с.
4.Медведев А.Г. Применение программы Micro-Cap V в моделировании электропривода / А.Г.
Медведев, Ю.М. Фролов // Россия на пороге III тысячелетия: общество и государство, экономика, наука и
техника: Тр. межвуз. научной студенческой конференции. Воронеж, 2001. С.51-52.
Получено 18.09.01 |
Воронежский государственный |
|
технический университет |
120
УДК 621.313
Т. А. Бурковская, Ю. В. Писаревский ОСОБЕННОСТИ РАСЧЕТНОГО ПРОЕКТИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ С ПОЛЫМ РОТОРОМ
Рассматриваются особенности процедур расчетного проектирования электродвигателей с полым ротором, связанные с
конструктивной спецификой данных электрических машин и областью их применения.
При расчете электродвигателей с полым якорем, как и любой другой электрической машины, число уравнений значительно меньше числа параметров, которые требуется получить в соответствии с конкретным техническим заданием.
Конструктивные особенности электродвигателей постоянного тока с полым якорем не позволяют воспользоваться, в полной мере, накопленным опытом проектирования обычных машин постоянного тока. При расчете целесообразно ориентироваться на уже эксплуатируемые электрические машины такого же типа и приблизительно отвечающие тем же требованиям, что и рассчитываемая машина.
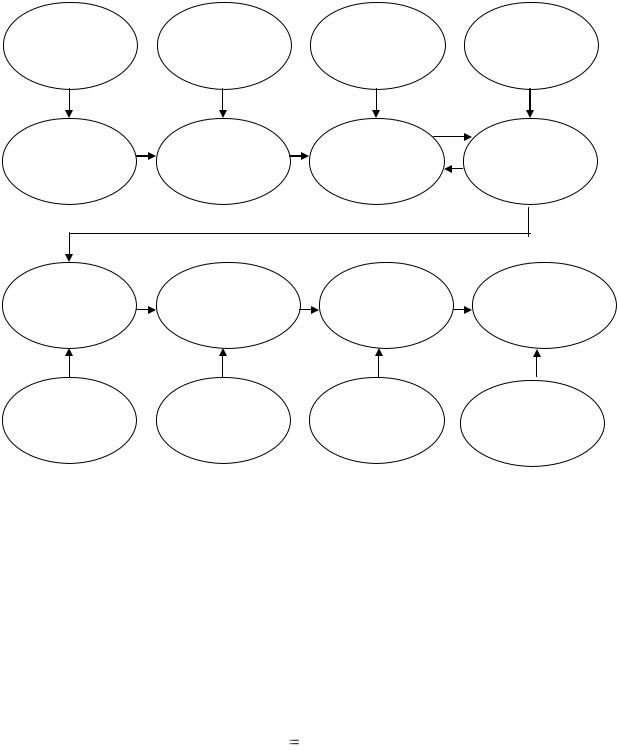
Однако существующие рекомендации не могут отразить всего многообразия требований, предъявляемых и данным электрическим машинам. Кроме этого предъявляемые требования могут быть настолько противоречивыми, что требуется отступление от принятых норм и оптимальных соотношений. В данном случае целесообразно воспользоваться семантической моделью процесса проектирования, представленной на рис. 1.
Параметры проектирования микродвигателей обычно имеют ограничения, относящиеся к следующим группам / 1 /.
1. Массогабаритные требования:
по размерам электрической машины; по массе электрической машины.
2. Эксплуатационно-технические требования:
по превышению температуры обмотки якоря над температурой окружающей среды; по скорости нарастания температуры якоря;
по перегрузочной способности; по пусковому току;
по жесткости механической характеристики; по быстродействию; по коэффициенту полезного действия;
по допустимым механическим напряжениям.
121
3. Технологические требования:
по коэффициенту заполнения полого якоря медью; по размерам проводников и т. п.
4.Требования государственных стандартов и конкретного технического задания.
Матрица |
Математи- |
Математи-ческая |
Оптималь-ная |
|
модель |
модель |
|||
вариантов |
ческая |
|||
|
|
|||
|
модель |
|
|
Генерация |
Предвари- |
Машинное |
Оптималь- |
|
вариантов |
||||
тельный |
моделирова |
ные |
||
|
||||
|
расчет |
ние |
параметры |
Анализ оп- |
Механиче- |
Заключи- |
Фиксация |
тимальных |
ский и тепло- |
тельный |
|
вариантов |
вой расчеты |
поверочный |
расчетных |
|
|
|
Аналоговы |
Математи- |
Математи- |
Формат |
е |
ческая |
ческая |
данных |
Рис. 1. Семантическая модель процесса проектирования микродвигателей постоянного тока
Целевые функции или критерии оптимальности выбираются в зависимости от назначения машины и условий эксплуатации.
В качестве наиболее характерных критериев оптимальности можно отметить следующее:
1. Максимум номинальной мощности на единицу объема или массы
СV |
Pн |
; |
(1) |
|
V |
||||
|
|
|
122