

3127
.pdfкальные координаты центров масс звеньев. Понятно, что x2 j энергия будет функцией обобщенных координат
n
П(q) = - g
j=1
= x2 j (q), поэтому потенциальная
mj x2 j (q). |
(1.6) |
Знак «минус» свидетельствует о том, что вектор силы тяжести направлен вниз по оси Оx2 базовой системы координат.
Из уравнений (1.3) (1.6) может быть получено следующее выражение /12/:
|
|
|
n |
|
|
n |
|
|
|
|
|
A v j (q) q v + |
B v j (q, q ) q v + Cj (q) = Pj, |
|
||||
|
|
|
v=1 |
|
|
v =1 |
|
|
|
|
|
(1.7) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
n |
|
|
|
|
|
n |
|
|
|
|
d |
|
W |
|
W |
|
|
|
где |
A |
|
(q)q |
|
B |
(q, q) q |
|
= |
|
|
, |
|
|
|||||
v j |
|
v |
|
|
|
|
|
|
||||||||||
|
|
|
v |
|
v j |
|
|
dt |
|
q j |
|
q j |
|
|
||||
v |
1 |
|
|
|
|
v |
1 |
|
|
|
|
|
|
|
||||
C j(q) |
|
П |
, |
ν |
1 2 n . |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
q j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, уравнения динамики ИМ с n степенями подвижности представляют собой связанную систему n обыкновенных дифференциальных уравнений второго порядка. Общий порядок системы равен 2n. Состояние механизма как динамической системы определяется 2n
переменными qj , q j , j = 1, 2, ... , n.
Необходимо отметить, что в большинстве случаев на практике необходимо учитывать ди-
11
намику только первых трех звеньев манипулятора /5/. Последние три звена универсального робота часто имеют малые размеры по сравнению с тремя первыми и определяют ориентацию рабочего органа. В связи с этим в последующих четырех разделах мы рассмотрим уравнения движения ТМ, работающих в различных системах координат: декартовой, цилиндрической, сферической и угловой, которые различаются соотношением кинематических пар поступательного и вращательного типа. При этом увеличение числа кинематических пар вращательного типа приводит к усложнению уравнений движения и усилению взаимовлияния степеней подвижности.
1.3.Уравнения движения манипулятора
вдекартовой системе координат
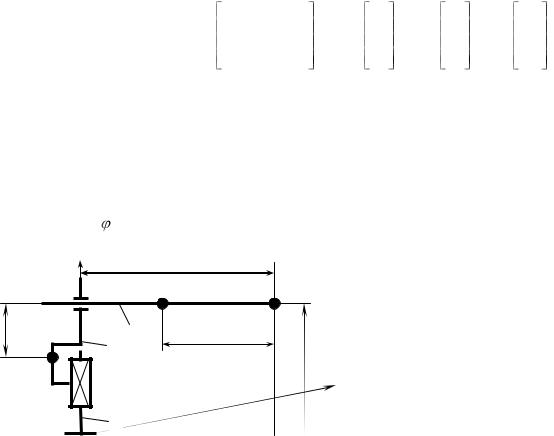
Расчетная схема ТМ, работающего в декартовой системе координат, приведена на рис. 1.1. Массы звеньев 1, 2 и 3 обозначены через m1, m2 и m3 соответственно. Масса рабочего органа обозначена m. ТМ имеет три поступательные кинематические пары. Данная кинема-
тическая схема дает возможность исключить взаимное влияние координатных приводов, т.к. перемещения по различным координатам осуществляются вдоль взаимно перпендикулярных осей Ox1, Ox2, Ox3.
|
x3 |
x1 |
|
|
|
|
|
0 |
|
x2 |
|
|
|
12 |
|
|
|
|
|
|
|
|
2 |
|
|
|
m2 |
|
|
|
m1 |
Рис. 1.1. Расчетная схема ТМ в декартовых координатах
Уравнения Лагранжа для рассматриваемой схемы имеют вид:
d |
|
W |
|
W |
|
П |
Fj |
, j 1, 2, 3. |
(1.8) |
|
|
|
|
|
|
|
|||
dt |
|
x j |
|
x j |
|
x j |
|||
|
|
|
|
|
|
где Fj —силы, развиваемые в сочленениях поступательных приводов.
Обозначим через V1, V2, V3 и V абсолютные (в декартовой системе) значения скоростей движения точек, в которых сосредоточены массы m1, m2, m3 и m. В таком случае выражения для соответствующих кинетических энергий будут выглядеть следующим образом:
13
|
|
|
2 |
/2 = m1 |
|
2 |
/2, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W1 = m1V1 |
x 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
2 |
/2 = m2 |
|
|
2 |
|
2 |
)/2, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W2 = m2V2 |
( x 1 |
+ x 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.9) |
||||||||
|
|
|
2 |
|
|
|
2 |
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
/2 = m3 |
|
)/2, |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
W3 = m3V3 |
( x 1 |
+ x 2 |
+ x |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
2 |
|
|
|
2 |
|
2 |
|
2 |
)/2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Wm = m V3 |
/2 = m ( x 1 |
|
+ x 2 |
+ x 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
С учетом (1.9) кинетическая энергия ИМ: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
2 |
)+ |
|
|
|
|
|
|
|
|
|
|
W( x 1 |
, x 2 |
, x |
3)=[m1 x |
1 |
+m2( x 1 |
+ x |
2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
2 |
)]/2. |
(1.10) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+(m3+m)( x |
1 |
+ x 2 |
+ x 3 |
|
||||||
Потенциальная энергия П(x3) системы зависит только от переменной x3 |
и ее частные про- |
||||||||||||||||||||||||
изводные имеют вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
П / |
|
x1 = 0, |
П / |
x2 = 0, |
|
П / |
|
x3 = (m3+m)g. |
(1.11) |
||||||
Частные производные от кинетической энергии: |
|
|
|
|
|
|
|
|
|
||||||||||||||||
W/ x |
1 = |
x |
1(m1+m2+m3+m), |
|
W/ x1 = 0, |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W/ |
|
x 2 = |
x |
2(m2+m3+m), |
|
|
|
W/ |
x2 = 0, |
(1.12) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W/ x |
3 = |
x |
3(m3+m), |
|
|
|
|
|
W/ x3 = 0. |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С учетом (1.11) и (1.12) из (1.8) находим уравнения динамики ТМ в декартовых координа-
14

тах: |
|
|
|
|
|
(m1 |
+m2+m3+m) x 1 = F1, |
|
|
|
|
|
|
|
|
|
|
(m2 |
+m3+m) x |
2 =F2, |
(1.13) |
|
|
|
|
|
|
|
|
(m3 |
+m) x 3+(m3+m)g = F3. |
|
|
|
|
|
|
|
|
|
|
Как видно из (1.13), взаимосвязь движений по координатам x1, x2 |
и x3 отсутствует. |
||||
Введем следующие обозначения: |
|
|
|
||
A1 = m1+m2+m3+m, |
A2 = m2+m3+m, |
|
|
(1.14) |
|
A3 = m3+m, |
|
C3 = (m3+m)g, |
|
|
|
|
|
|
|
||
тогда из (1.13) найдем выражения, соответствующие уравнению (1.7): |
|
|
|||
|
|
A1 x 1 = F1, |
A2 x 2 = F2, |
A3 x |
3+C3 = F3. (1.15) |
|
|
|
|
|
|
Уравнения (1.15) можно представить в векторной форме |
|
|
|||
|
|
|
A q + C = P, |
|
(1.16) |
где A — диагональная матрица инерционных параметров; q — матрица ускорений обобщенных координат;
C — матрица гравитационных сил;
15
P — матрица обобщенных сил. |
|
|
|
|
|
|
|
|
|
|||
Матрицы A, q , C и P имеют следующий вид: |
|
|
|
|
|
|
||||||
|
|
|
|
A1 |
0 |
0 |
|
|
x 1 |
0 |
F 1 |
|
|
|
|
A = |
0 |
A 2 |
0 |
, |
q = |
x 2 , C = |
0 |
, P = F 2 . |
(1.17) |
|
|
|
|
0 |
0 A 3 |
|
|
x 3 |
C3 |
F 3 |
|
|
|
|
|
1.4. Уравнения движения манипулятора |
|
|
|
||||||
|
|
|
в цилиндрической системе координат |
|
|
|
||||||
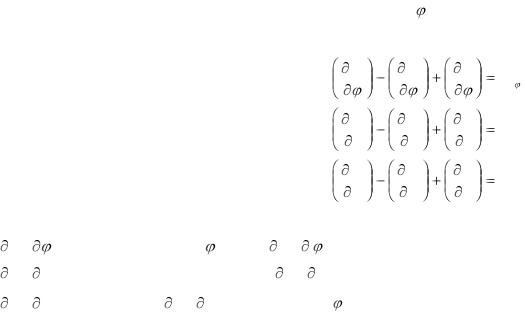
Расчетная схема представлена на рис. 1.2. Обозначим через J1 момент инерции звена 1 от- |
||||||||||||
носительно |
оси |
Ox3, массы звеньев 2, 3 и |
рабочего |
органа — m2, m3 |
и |
m соответственно. |
||||||
Геометрические размеры конструкции указаны на чертеже. Рассматриваемый ТМ имеет одну |
||||||||||||
вращательную и две поступательные кинематические пары. Обобщенными координатами яв- |
||||||||||||
ляются угол поворота , высота подъема стрелы l и ее длина r. |
|
|
|
|||||||||
Запишем уравнения Лагранжа для исполнительного механизма рассматриваемой схемы. |
||||||||||||
|
x3 |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m3 |
|
m |
|
|
|
|
|
|
|
l0 |
|
2 |
3 |
ro |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
m2 |
J1 |
|
|
16 l |
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|

Рис. 1.2. Расчетная схема ТМ в цилиндрических координатах
Обозначим через Ws кинетическую энергию звена с номером s. Тогда кинетическая энергия механизма
3 |
|
|
s=1 |
W = Ws + Wm , |
(1.18) |
|
|
где Wm —кинетическая энергия рабочего органа.
Кинетическая энергия звена 1 обусловлена вращательным движением с угловой скоростью , а кинетическая энергия звена 2 — поступательным перемещением массы m2 вдоль оси Ox3. На этом основании имеем:
W1( ) = J1 |
2/2, |
W2( l ) = m2 l 2/2. |
(1.19) |
17 |
|
|
|

Обозначим через V3 и V абсолютные (в декартовой системе) значения скоростей движения точек, в которых сосредоточены массы m3 и m. В таком случае выражения для соответствующих кинетических энергий будут:
W3 = m3V3 |
2 |
|
|
|
2 |
+ |
|
2 |
+ |
|
2 |
)/2, |
|
|
|
/2 = m3( x 13 |
x |
23 |
x 33 |
|
|||||||||
Wm = mV |
2 |
|
|
2 |
+ |
|
2 |
+ |
|
2 |
)/2, |
(1.20) |
||
|
|
|
||||||||||||
|
/2 = m( x 1 |
|
x |
2 |
x 3 |
|
||||||||
где xs3, xs — координаты точек m3 и m соответственно. |
|
|||||||||||||
Из чертежа находим: |
|
|
|
|
|
|
|
|
|
|
||||
x13 = (r-r0)sin |
, |
|
|
x1 = r sin |
, |
|
|
|||||||
x23 = (r-r0)cos , |
|
|
x2 = r cos |
, |
|
(1.21) |
||||||||
x33 = l, |
|
|
|
|
|
|
x3 = l. |
|
|
|
|
|
||
Подставляя выражение (1.21) в (1.20), получим: |
|
|||||||||||||
W (r, r, , l ) |
m [r 2 |
l 2 |
(r r )2 |
2 ]/ 2 , |
|
|||||||||
3 |
|
|
|
3 |
|
|
|
|
0 |
|
|
|
|
(1.22) |
W (r, r, , l ) |
m[r 2 |
l 2 |
r 2 2 ]/ 2 . |
|
|
|||||||||
|
|
|
||||||||||||
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C учетом (1.18), (1.19) и (1.22) кинетическая энергия ИМ определяется из выражения
|
[(J1 + mr |
2 |
2 |
) |
|
2 |
+ |
|
|
|
|
W (r, r, ,l) |
|
+ m3(r-r0) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
2 |
|
2 |
]/2. |
(1.23) |
|
|
|
|
|
+ (m2 + m3 + m) l |
+ (m3 + m) r |
|
||||
18
Потенциальная энергия системы П зависит только от переменной l:
П(l ) = m1 g x2 |
* +m2 (l-l 0 )g+(m3 +m)gl, |
(1.24) |
где m1, x2* —масса и положение центра масс звена 1.
Обозначим через М момент в сочленении координаты , через Fl, Fr обозначим силы, действующие в сочленениях поступательного типа. Уравнения Лагранжа будут иметь вид:
момент в сочленении координаты , через Fl, Fr обозначим силы, действующие в сочленениях поступательного типа. Уравнения Лагранжа будут иметь вид:
d |
|
W |
|
W |
|
П |
M , |
|
|
|
|
|
|
|
|
|
|
||
d t |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
d |
|
W |
|
W |
|
П |
Fl |
, |
(1.25) |
|
|
|
|
|
|
|
|||
d t |
|
l |
|
l |
|
l |
|||
|
|
|
|
|
|
||||
d |
|
W |
|
W |
|
П |
Fr |
, |
|
|
|
|
|
|
|
|
|
||
d t |
|
r |
|
r |
|
r |
|
||
|
|
|
|
|
|
||||
Частные производные от кинетической и потенциальной энергии:
W/ = [J1+mr2+m3(r-r0)2] , |
W/ = 0, |
||||||
W/ |
l = (m2+m3+m) l , |
|
W/ l = 0, |
||||
|
|
|
|
|
2 |
(1.26) |
|
W/ |
W/ r = [mr+m3(r-r0)] |
, |
|||||
r = (m3+m) r , |
|
|
|||||
19
П /  = 0, П/ l = (m2+m3+m)g, П/ r = 0.
= 0, П/ l = (m2+m3+m)g, П/ r = 0.
Из (1.25) и (1.26) находим уравнения динамики ТМ:
J |
1 |
mr 2 m |
(r r )2 |
|
2 mr |
m |
(r r ) r |
M , |
|
3 |
0 |
|
|
3 |
0 |
|
|
|
|
|
|
(m2 m |
|
m 3 m)g F l, |
(1.27) |
|
|
|
|
|
3 m)l (m 2 |
|||
(m |
3 |
m)r |
mr m |
(r r ) 2 |
F . |
|
|
|
|
|
3 |
0 |
r |
|
|
|
Первое и третье уравнения системы (1.27) взаимосвязаны, что свидетельствует о взаимовлиянии движений по углу и вдоль направления r.
Введем следующие обозначения:
A r |
J |
1 |
m |
r r 2 |
mr 2 |
, |
|
|
|
3 |
0 |
|
|
|
|
B r, r, |
|
2 mr m3 r r0 |
r , |
|
|||
A l |
m2 |
|
m3 |
m , |
|
|
(1.28) |
|
|
|
|
|
|
|
|
Cl |
m2 |
|
m3 |
m g , |
|
|
|
A m m , |
B r, |
mr m r r |
2 . |
||||
r |
3 |
|
|
r |
|
3 0 |
|
C учетом (1.28) уравнения динамики ТМ приобретают вид:
20