

3127
.pdf
|
Число |
Чис- |
|
Аналоговые входы |
цифровых |
ло |
|
ка- |
|||
Наиме |
каналов |
||
на- |
|||
нова- |
|
лов |
|
ние |
|
счет |
|
|
чи- |
||
платы |
|
||
|
ка |
||
|
|
|
Чис- |
Диапазоны |
Чис- |
Диапазоны |
Вход- |
Вы- |
|
|
ло |
ло |
выходных |
||||
|
кана- |
измерения |
кана- |
напряже- |
ных |
ход- |
|
|
напряжений, В |
|
ных |
||||
|
лов |
лов |
ний, В |
|
|||
|
|
|
|
|
|||
PCL- - |
- |
6 |
10; 0 10; |
16 |
16 - |
||
211
726 |
|
|
|
|
|
5; 0 |
+5. |
|
|
|
|
|
- |
|
- |
|
12 |
10; 0 |
10; |
16 |
16 |
- |
|
|
|
|
|
|
|
5; 0 |
+5. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
32 |
5; |
2,5; |
1,25; |
- |
|
- |
|
- |
- |
- |
|
|
|
0,625. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
5; |
2,5; |
1,25; |
1 |
0 |
+10; |
16 |
16 |
- |
|
|
|
0,625; |
0,3125. |
|
0 |
+5. |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
212
|
16 |
10; |
5; |
2,5; |
|
1,25; |
2 |
0 |
+10; |
16 |
16 |
1 |
|
|
|
0,625; |
0,3125. |
|
0 |
+5. |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
10; |
5; |
2,5; |
|
1,25; |
1 |
0 |
+10; |
16 |
16 |
1 |
|
|
|
|
|
0,625. |
|
|
|
0 |
+5. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
10; |
|
5; |
2,5; |
1; |
2 |
0 |
+10; |
16 |
16 |
1 |
|
|
|
|
|
0,5. |
|
|
|
0 |
+5. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
10; |
|
5; |
2,5; |
1; |
1 |
0 |
+10; |
16 |
16 |
1 |
|
|
|
0,5; |
0,1; |
0,05; |
|
0 |
+5. |
|
|
|
|||
213

|
|
0,01; |
0,005. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
- |
|
- |
- |
32 |
32 |
3 |
|
|
|
|
|
|
|
|
|
|
- |
- |
|
- |
- |
32 |
32 |
- |
|
|
|
|
|
|
|
|
|
|
- |
- |
|
- |
- |
16 |
16 |
1 |
|
|
|
|
|
|
|
|
|
214
|
|
|
|
|
|
|
|
|
- |
- |
- |
- |
8 |
8 |
- |
|
|
|
|
|
|
|
|
|
- |
- |
- |
- |
16 |
16 |
10 |
|
|
|
|
|
|
|
|
|
- |
- |
- |
- |
16 |
16 |
3 |
|
|
|
|
|
|
|
|
215
Существуют и устройства, специально ориентированные на прецизионное управление сервоприводами, и, в частности, управление роботами. Платы PCL-832 и PCL-839 с соответствующим программным обеспечением превращают компьютеры IBM PC в контроллеры точного позиционирования по трем координатам. Обеспечиваются линейная интерполяция по трем координатам и двухкоординатная круговая интерполяция; формирование характеристики разгона/замедления. Платы имеют по 8 маскируемых линий прерывания.
Плата PCL-839 ориентирована на управление шаговыми двигателями робота. Максимальная частота импульсов на выходах координат16382 кГц. Обеспечивается трапециидальная форма временной диаграммы изменения скорости, выход на установочную скорость перед точкой позиционирования. Имеется по пять изолированных цифровых входов на координату для подсоединения конечных выключателей, а также по 16 цифровых входов и выходов с уровнями ТТЛ-логики.
Через 12-разрядные цифро-аналоговые преобразователи платы PCL-832 на приводы поступают задающие сигналы, изменяющиеся в стандартном диапазоне 10 В. Специальная схема синхронизирует работу всех трех координат. Обеспечиваются возвращение на позицию исходного состояния, толчковый режим при подходе к заданной точке позиционирования. Период дискретности при выдаче задающих воздействий программируется в диапазоне от 1 мс до 2 с. Использование двух плат PCL-832 позволяет управлять шестью координатами робота.
После проектирования аппаратных средств системы управления робота необходимо разработать программы, обеспечивающие формирование задающих сигналов для исполнительного уровня управления и их интерполяцию между опорными точками, а при необходимости и реа-
216

лизацию алгоритмов адаптации и планирования движения робота на участке с препятствиями. Эти вопросы рассматриваются в следующих четырех пунктах.
6.4. Программная реализация алгоритмов решения прямой и обратной задач кинематики
Прямая задача кинематики для любой кинематической схемы манипулятора решается однозначно. Ранее получены выражения (2.7), (2.16) и (2.23), позволяющие аналитически определить положение рабочего органа трехкоординатных манипуляторов, работающих в цилиндрической, сферической и угловой системах координат.
Решение обратной задачи кинематики для рассмотренных манипуляторов в соответствии с уравнениями (2.13), (2.15), (2.20), (2.22), (2.26), (2.32) и (2.33) также не вызывает затруднений.
Однако не для всех манипуляторов можно получить аналогичные уравнения.
Кинематическая схема одного из таких манипуляторов содержит поворотную платформу, вертикальную и горизонтальную степени подвижности, а также устройства для ориентации схвата. Управление движением осуществляется по трем угловым координатам. На рис. 6.7 схематично показаны вертикальная степень подвижности с длиною l1, горизонтальная сте-
пень подвижности с длиною l2, а также система |
обобщенных координат 1 , |
2 , |
3 манипулятора и система декартовых координат x1, x2, |
x3 рабочего пространства. |
|
217
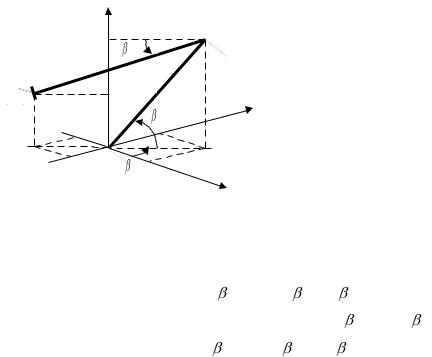
Рис. 1.
Рис.
x 2 |
|
3 |
|
l 2 |
|
l 1 |
x 1 |
|
|
|
2 |
0 |
1 |
x 3 |
|
||
Расчетная схема манипулятора |
||
1. Расчетная схема манипулятора |
||
Рис. 6.7. Расчетная схема трехкоординатного манипулятора
Прямая задача кинематики для рассматриваемой расчетной схемы решается следующим образом:
|
|
x1 = (l1 cos |
2 - l2 cos |
3 )sin |
1 , |
|
|
|
|
x2 =l1 sin |
2 - l2 sin 3 , |
(6.5) |
|
|
|
x3 =(l1 cos |
2 - l2 cos |
3 ) cos |
1 . |
|
Уравнения кинематики для скоростей, соответствующие (6.5), имеют вид: |
|
|||||
. |
. |
. |
|
|
|
|
|
|
|
218 |
|
|
|
|
x1 |
= ( l 2 sin |
3 3 - l1sin |
2 2 ) sin |
1 + |
|
|
|
. |
|
|
|
|
+ ( l1 cos |
2 - l2 cos |
3 ) cos 1 |
1 , |
. |
. |
|
. |
|
|
x2 = l1 cos 2 2 - l2 cos 3 3 , |
(6.6) |
. |
. |
. |
|
|
|
|
|
x3 = ( l2 sin |
3 |
3 - l1 sin |
2 2 ) cos 1 - |
|
|
|
|
. |
|
|
|
- ( l1cos |
2 |
- l2 cos |
3 ) sin 1 1 . |
Решение обратной задачи кинематики в аналитическом виде для рассматриваемого манипулятора затруднительно, поэтому применяется метод последовательных приближений (или метод итераций) /32/.
Из уравнений системы (6.6) следуют выражения для определения первых производных от обобщенных координат в зависимости от скоростей схвата рассматриваемого манипулятора по координатам декартового пространства:
|
|
. |
|
. |
|
x1 cos |
|
- x3 sin |
|
|
|
|
|
|
|
|
. |
1 = |
1 |
1, |
|
||
|
|
|
|
|
|
l1cos |
2 - l2 cos |
|
|||
|
|
|
|
|
|
|
3 |
|
|||
|
. |
. |
|
|
|
. |
|
|
|
|
|
. |
( x1 sin |
1 + x3 cos |
1 ) cos |
3 + x2 sin |
3 |
|
|
||||
|
|
|
l1 sin ( |
3 - 2 ) |
2 = |
|
|
, |
(6.7) |
||
|
|
|
|
|
|
|
|
||||
|
. |
. |
|
|
|
. |
|
|
|
|
|
. |
( x1sin |
1 + x3 |
cos |
1 ) cos |
2 + x2 sin |
2 |
|
|
|||
219
3 = |
|
. |
l2 sin ( 3 - |
2 ) |
|
Для решения обратной позиционной задачи в среде DELPHI 3.0 разработана программа 1, алгоритм которой представлен на рис. 6.8. Он выполнен по итерационной схеме /17/.
На начальном этапе вводятся длины звеньев l1, l2 манипулятора, число m опорных точек, допустимая среднеквадратичная погрешность Е, определяются типы массивов, переменных и процедура STRAIGHT решения прямой задачи кинематики. Далее вводятся исходные угловые координаты 1 , 2 , 3 манипулятора и массивы X1C, X2C, X3C координат опорных точек на траектории движения схвата.
В ходе отработки цикла итерации для текущих значений угловых координат манипулятора решается прямая задача кинематики, определяется среднеквадратичное отклонение схвата от целевого состояния, вычисляются требуемые приращения и формируются новые значения угловых координат.
Циклы итераций повторяются до тех пор, пока среднеквадратичное отклонение схвата не уменьшится до величины заданной погрешности Е и соответствующие значения угловых координат не будут удовлетворять ограничениям на обобщенные координаты. После этого полученные в последнем цикле значения угловых координат выводятся как результат решения обратной задачи кинематики.
Необходимо отметить, что даже для трехкоординатного манипулятора обратная задача кинематики решается неоднозначно. Проверка соответствия результатов решения естественным кинематическим ограничениям на обобщенные координаты позволяет получить единственный
220