

3127
.pdfсигналы, содержащие информацию о заданных перемещениях обобщенных координат и их производных, а также об усилиях, которые необходимо развивать в сочленениях манипулятора.
5. АЛГОРИТМЫ АДАПТИВНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ
161
5.1. Адаптивный подход к управлению манипуляционными системами
Большинство существующих в промышленности роботов выполнено по принципу программного управления: тактический уровень формирует программу движения, которая задает идеальный закон изменения во времени обобщенных координат, соответствующий образцовому выполнению рабочей операции; исполнительный уровень обеспечивает выполнение заданной программы.
Возможности программного управления ограничены в связи с тем, что не учитываются изменения в широком диапазоне параметров робота и свойств окружающей среды; при работе по разомкнутой схеме тактический уровень не следит за реальным перемещением манипулятора и не вносит коррективы в программу движения при несоответствии реальной работы манипуляционной системы заданной.
В тоже время для манипуляционных систем характерна нелинейность и нестационарность параметров. При перемещении манипулятора сильно изменяются электромеханические постоянные времени приводов.
Проявляющиеся при стремлении добиться максимального быстродействия упругие свойства манипуляционной системы приводят к возникновению собственных колебаний конструкции, частота которых нестабильна. Нелинейность магнитных цепей якорей двигателей вызывает изменение электромагнитных постоянных времени якорных цепей, а нелинейность и дискретность характеристик тиристорных преобразователей сильно
162
влияет на динамику токовых контуров.
Вподобных нестационарных условиях программное управление может оказаться неэффективным —снижается точность отработки программного движения, возникают автоколебания; наличие внешних препятствий (особенно подвижных) может привести к столкновению робота с преградой и аварийной ситуации. Особенно это относится к широко используемому в практике методу проектирования исполнительных приводов координат в виде отдельных систем подчиненного регулирования, которые настраиваются без учета взаимовлияния степеней подвижности и нелинейности уравнений движения. Рассмотренные в главе 4 алгоритмы управления по ускорению, построенные с учетом уравнений движения манипулятора и настраиваемые на заданный переходной процесс, менее чувствительны к изменению параметров.
Вусловиях, когда программное управление не обеспечивает требуемые технические характеристики робота, возникает необходимость в адаптивном управлении. Адаптивные системы включают в свой состав регуляторы, вырабатывающие программные задающие воздействия
сучетом изменяющихся свойств и условий работы робота и имеющие возможность автоматически перестраиваться так, чтобы по истечении некоторого конечного времени цель управления (приближение к программному движению с заданной точностью) была бы достигнутой. Такие регуляторы называются адаптивными или самонастраивающимися, а подход, базирущийся на принципе адаптации системы — адаптивным подходом.
Вто время как программное управление обеспечивает устойчивость «в малом» - в узком диапазоне изменения параметров робота и свойств окружающей среды, задачей адаптивного управления является обеспечение устойчивости «в большом». Отсюда и возникает необходимость автоматической перенастройки регуляторов при движении манипулятора, когда класси-
163
ческие регуляторы не могут обеспечить требуемые характеристики.
Существует два основных подхода к решению задачи адаптивного управления. Первый подход — это адаптивное управление с настраиваемой моделью, когда улучшение модели обеспечивается методами оценивания параметров в реальном времени, после чего эта модель используется для управления по принципу обратной связи. Второй подход — это адаптивное управление с эталонной моделью. При этом подходе контроллер выбирается таким образом, чтобы поведение замкнутой системы соответствовало поведению заранее выбранной модели в смысле некоторого критерия.
Работоспособность адаптивной системы с настраиваемой моделью (АСНМ) и адаптивной системы с эталонной моделью (АСЭМ) основаны на следующих предположениях в идеальном случае:
1.Объект управления —линейный.
2.Эталонная модель является линейной и стационарной системой (для АСЭМ).
3.Модель и система (объект) одинакового порядка.
4.На интервале адаптации параметры изменяются только под воздействием адаптивного механизма (условие квазистационарности).
5.Существует такое число настраиваемых параметров регулятора (модели), по которым адаптивное управление замкнуто.
6.Из внешних сигналов на адаптивную систему действуют только входные сигналы управления.
7.Исходные значения настраиваемых параметров перед моментом функционирования адаптивной системы неизвестны.
164
8. Вектор состояния системы (объекта) доступен измерению по всем компонентам. Очевидно, что при управлении манипуляционной системой предположения для идеально-
го случая не выполняются, либо нарушаются:
1.Объект управления — нелинейный (манипулятор).
2.Эталонная модель — нелинейная и нестационарная система.
3.Порядки модели и объекта могут не совпадать.
4.В ходе адаптации параметры манипулятора изменяются.
5.По всем настраиваемым параметрам адаптивная система может быть не замкнутой.
6.В системе могут действовать внешние возмущения.
7.Измерение компонент вектора состояния системы (объекта) производится с аддитивным шумом.
Несоответствие порядков модели и объекта более характерно для АСЭМ. Предположение по пятому пункту для реального случая управления манипулятором относятся только к АСЭМ.
В последующих разделах мы рассмотрим постановку задачи адаптивного управления, структуры АСЭМ и АСНМ, а также пример построения самонастраивающейся системы.
5.2. Постановка задачи адаптивного управления
Математическое описание объекта при адаптивном управлении представляется в виде
.
y(t) = Ao y(t) + B o U(t ) + fв (t ), yвых = Cо y, (5.1)
где y(t) — m-мерная функция состояния системы;
165

Ао, Во, Со — соответственно (m m), (m n), (p m)-мерные матрицы, зависящие от парамет-
ров системы и функции состояния системы y(t); |
|
|
|
U(t) — n-мерная функция управляющих воздействий; |
|
||
yвых — p-мерный вектор выходов объектов; |
|
|
|
fв(t) — m-мерная функция внешних возмущений; |
|
||
Передаточная функция объекта управления следует из системы уравнений (5.1): |
|
||
yвых |
Co Bo |
|
|
W(Pл) = ─── = ─────── , |
(5.2) |
|
|
U |
(Im Рл - A о ) |
|
|
|
где Im — единичная матрица размерности m m; |
|
|
Рл — оператор дифференцирования. |
|
|
|
Предполагаем, что тройка матриц Ао, Во, Со |
управляема и наблюдаема, а числители эле- |
||
ментов передаточной матрицы W(Рл) гурвицевы (устойчивы). |
|
||
Уравнение адаптивного регулятора имеет вид |
|
|
|
|
|
U = U(y, Kн, z, g), |
(5.3) |
где g = g(t) — n-мерный вектор входных воздействий; Кн = Кн (t) — матрица настраиваемых параметров;
z= z(t) — n-мерный вектор дополнительных (сигнальных) воздействий.
Матрица Кн вводится для обеспечения параметрической настройки (ПН), вектор z — сиг-
нальной настройки (СН). Кн и z являются средствами адаптации. Предполагаем, что переменные Kн, z и g ограничены, т.е.
166
Kн Ок; z Oz; g Og, где Oк, Oz, Og —некоторые ограниченные множества. Тогда U Оu и управление является допустимым.
Пусть задано некоторое число ео > 0 и программное движение yм(t) системы (5.1) и (5.3),
удовлетворяющее уравнению эталонной модели |
|
|
. |
|
|
yм = Aм yм + Bм g, |
yм (tо) = yмо, |
(5.4) |
где Ам, Вм — гурвицевы матрицы (устойчивые);
yм, у м — функция состояний эталонной системы и еѐ первая производная по времени. Задача формулируется следующим образом.
Требуется построить такой закон управления U(t), чтобы при любых  O
O , y(t о ), yм (t о ) выполнялось неравенство
, y(t о ), yм (t о ) выполнялось неравенство
[y(t )-yм (t )] |
= [ ec (t )] eо |
(5.5) |
для любых t ta , ta = tо +ta ', t о |
0 (где ta'- время адаптации), |
|
или предельное соотношение |
|
|
lim [ec(t)] = 0. |
(5.6) |
|
t |
|
|
5.3. Адаптивное управление в рамках |
|
структу- |
ры АСЭМ |
|
|
Объект опишем в следующем виде:
167
. |
|
|
|
y = [At +aн (y, )]y +[Bt +bн (y, |
)]U+ fв , |
(5.7) |
|
где At =At ( |
), Bt = Bt ( |
) — функциональные матрицы, завися- |
|
щие от изменяющихся параметров ; |
|
||
aн (y, ), bн (y, ) — некоторые нелинейные добавки. |
|
||
Адаптивный регулятор (5.3) будем выполнять в виде |
|
||
|
U(t ) = Ka y + Kb (g + z), |
(5.8) |
|
где Кa , Кb — (n m), (n n)-мерные матрицы настраиваемых коэффициентов.
Из уравнений (5.4), (5.7), (5.8) получим выражение:
.
y=Aм y +Bм g +[At +Bt Ka -A м ]y +[Bt Kb -Bм ]g +
+fв +(aн +bн Kа )y +bн Kb g +Bt Kb z +bн Kb z. (5.9)
Из уравнения (5.9) следует, что эталонное движение (5.4) обеспечивается в том случае, если выполняются соотношения
lim ( At +Bt Ka ) = Aм, |
|
lim Bt Kb = Bм, |
|
|||
t |
|
t |
|
|
(5.10) |
|
fв + (aн +bн Kа )y +bн Kb g +Bt Kb z +bн Kb z = 0. |
||||||
|
||||||
В ходе адаптации Кa |
Кa |
0, Kb Kb |
0, где Кa |
0 и Kb |
0 согласно (5.10) можно определить из |
|
168
соотношений |
|
|
|
|
|
|
|
|
|
|
|
|
Ka |
0 =(Aм -At )/Bt , |
Kb |
0 |
= Bм / Bt . |
(5.11) |
|
Введем следующие обозначения: |
|
|
|
|
|
|
|
||
|
|
|
|
Кa - Кa |
0 = a , |
Kb - Kb |
0 = b , |
(5.12) |
|
тогда уравнение (5.9) с учетом (5.11) запишется в виде |
|
|
|
|
|
||||
|
. |
|
|
|
|
|
|
|
|
|
y =Aм y +B м g +Bt a y + Bt |
b g + fв + |
|
|
|
|
|
||
|
|
|
+ (aн +bн Kа )y +bн Kb g +Bt Kb z +bн Kb z. |
(5.13) |
|||||
Из (5.13) и (5.4) следует уравнение ошибки |
|
|
|
|
|
|
|||
|
. |
|
|
|
|
|
|
|
|
|
ec = Aм ec +Bt |
a y + Bt b g + fв + |
|
|
|
|
|
|
|
|
|
|
+ (aн +bн Kа )y +bн Kb g +Bt Kb z +bн Kb z. |
(5.14) |
|||||
Уравнения алгоритмов адаптации, реализующих достижение цели управления (5.10), за- |
|||||||||
даются следующим образом: |
|
|
|
|
|
|
|
||
. |
. |
|
|
|
|
|
|
|
|
Kн = |
=A1 (Kн , eс , g); |
Kн =[Kа ; Kb]; |
= [ |
a , b]; |
(5.15) |
|
|
|
|
|
|
|
|
z = A2(ec, g, |
, t). |
|
|
(5.16) |
|
169
Система уравнений (5.15) соответствует параметрической настройке, уравнение (5.16) — сигнальной настройке. Использование одного алгоритма ПН целесообразно, когда отсутствуют нелинейные добавки aн и bн , а параметры изменяются в широких пределах. При наличии нелинейных добавок aн , bн и изменении  в узких пределах можно ограничиться сигнальной настройкой.
в узких пределах можно ограничиться сигнальной настройкой.
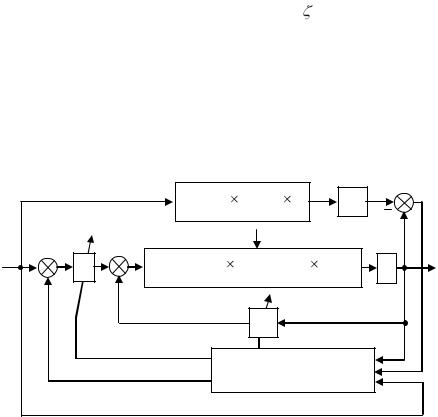
Структурная схема АСЭМ с ПН и СН приведена на рис. 5.1. Эталонное движение yм формируется в соответствии с программным управлением g согласно уравнению (5.4). Алгоритмы адаптации вырабатывают сигнал z, а также обеспечивают настройку матриц Kа , Kb по задающему воздействию g, функции состояния объекта y, а также результату сравнения eс функций состояний объекта y и эталонной модели yм. Управляющее воздействие на объект U формируется в соответствии с уравнением (5.8).
|
|
|
|
|
|
y |
ес |
|
|
|
у м |
Pл |
м |
||
|
|
у м=Aм ум+Вм g |
|
|
|
||
|
|
|
fв |
|
у |
|
|
g |
U |
|
|
|
|
y |
|
|
|
|
Pл |
||||
Кb |
|
у =[At +aн ] y+[Bt +bн ] U+fв |
|
||||
|
|
|
Кa |
|
|
|
|
|
|
z |
|
170 |
|
|
|
|
|
Алгоритмы адаптации |
|
|
|||