

1505
.pdf4.9.5.Определение уравновешивающей силы (Fy )
спомощью рычага Жуковского
Поворачиваем план скоростей для рассматриваемого положения механизма на 90° по направлению, противоположному вращению часовой стрелки. Все внешние силы, включая и силы инерции звеньев, переносим параллельно самим себе в соответствующие точки плана (рис. 4.23).
Скорость точки приложения уравновешивающей силы
VN = ω 1Rl .
Далее составляем уравнение равновесия рычага Жуковского в следующем виде:
Fy ( pn) + G1h1 + G3h2 + Fи3h3' + +G4h4 + Fи4h4 − (Fпс − Fи5 )( pd5 ) = 0,
Fy = −G1h1 − G3h3 − Fи3h3' − G4h4 − Fи4h4' + (Fпс − Fи5 )( pt) .
( pn)
Рис. 4.23. Повернутый план скоростей
141
Таким образом, если к звеньям механизма приложены силы и моменты, то уравнение равновесия вспомогательного рычага можно написать в следующем виде:
|
Ph + |
∑ |
M ′ |
F = ∑ i i |
i . |
||
y |
hy |
|
|
|
|
|
|
Мощность двигателя определяется по аналогии с предыдущим примером.
4.10. Принцип виртуальных перемещений для силового расчёта
Запишем для механизма принцип виртуальных перемещений в координатной форме:
n |
n |
n |
|
∑ Fxj δ xj + ∑ Fyjδ xj+ |
∑ Mδzj ϕ j = 0 , |
(4.38) |
|
j=1 |
j=1 |
j=1 |
|
где Fxj , Fyj – проекции всех сил, приложенных к звеньям механизма, кроме реакций в кинематических парах; M zj – моменты всех сил, приложенных к звеньям; δ xj ,δ yj – виртуальные осевые перемещения точек приложения сил; δ ϕ j – виртуальные угловые перемещения звеньев механизма;
n – число сил и моментов сил. Это уравнение является основным для силового расчета. Из него получаем два вывода:
1. Для равновесия механизма в целом и в каждой его точке нельзя задавать произвольно все внешние силы, часть из них должна быть определена в процессе расчета. Такие силы называют уравновешивающими силами Fy , их число равно числу обобщенных координат механизма. Часто
определяют не уравновешивающие силы, а уравновешивающие моменты M y , так как они связаны с уравновешивающими силами простыми соот-
ношениями.
Рассмотрим механизм строгального станка с приложенной к резцу силой полезного сопротивления F5 x (рис. 4.24). Какую силу необходимо
приложить в точке B1 перпендикулярно звену AB1 , чтобы механизм находился в равновесии? Применяем принцип виртуальных перемещений:
Fν δ B1− F5 xδ D2= 0 . |
(4.39) |
142
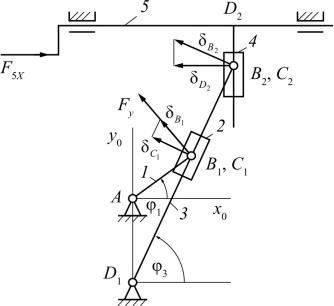
Из планов виртуальных перемещений, построенных на схеме механизма, выразим перемещение δ D2 через δ B1 :
δ C = δ B cos (ϕ |
|
− ϕ |
|
); δ B |
= δ C |
D1B2 |
, |
(4.40) |
||
|
|
|
|
|||||||
1 |
1 |
3 |
|
1 |
2 |
1 D C |
|
|
||
|
|
|
|
|
|
|
1 |
1 |
|
|
|
δ D2 = δ |
B2 cos (90° − |
ϕ 3 ) . |
|
|
|
|
|||
Подставляя в (4.39), получим
F = F x |
D1B2 |
sin ϕ |
3 |
(cosϕ |
3 |
cosϕ |
1 |
+ sin ϕ |
3 |
sinϕ |
1 |
). |
(4.41) |
|
|
||||||||||||||
y |
5 |
D1C1 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.24. Определение уравновешивающей силы Fy из принципа виртуальных перемещений
Уравновешивающий момент найдем из соотношения
M y |
= Fy |
lAB . |
(4.42) |
|
|
1 |
|
Именно этот момент надо приложить со стороны двигателя (извне), чтобы преодолеть силу полезного сопротивления. В теории механизмов принцип виртуальных перемещений редко используют непосредственно, а учитывают, что при голономных стационарных связях виртуальные перемещения совпадают с действительными перемещениями, поэтому
dx |
j |
=V |
xj |
dt; dy |
j |
= V |
yj |
dt; dϕ |
j |
= ω dt, |
(4.43) |
|
|
|
|
|
j |
|
где Vxj , Vyj – проекции скоростей точек приложения сил; ω j – угловые скорости звеньев.
143

Сокращая затем на dt, получают с учетом (4.41)
n |
n |
n |
|
∑ FxjVxj |
+ ∑ FyjVyj |
+ ∑ M zj ω j= 0. |
(4.44) |
j=1 |
j=1 |
j=1 |
|
Для механизмов с одной обобщенной координатой уравновешивающий момент находим из выражения
n |
n |
n−1 |
∑ FxjVxj + ∑ FyjVyj + ∑ M zj ω j= − Mωy |
||
j=1 |
j=1 |
j=1 |
где ω 1 – обобщенная угловая скорость. Окончательно получим:
M y |
= −∑ Fxj |
(Vxj ) −∑ Fyj (Vyj |
) − ∑ M zj ( |
||||
|
n |
|
|
n |
n−1 |
|
|
|
|
|
|
|
|
ω |
|
|
j=1 |
|
ω 1 |
j=1 ω |
1 |
j=1 |
|
1 , |
(4.45) |
ω j ). (4.46)
1
2. Из принципа виртуальных перемещений легко получают условия равновесия плоской системы сил. Так как в уравнении (4.38) виртуальные перемещения являются независимыми, то для равенства нулю левой части необходимо, чтобы
n |
n |
|
∑ Fxj = 0; |
∑ Fyj = 0. |
(4.47) |
j=1 |
j=1 |
|
Такие уравнения можно составлять как для всего механизма, так и для отдельных его звеньев. В этом случае реакции связей относят к категории внешних сил. В ТММ принято вести силовой расчет погруппно, поскольку группы Ассура являются статически определимыми.
4.10.1. Условие статической определимости групп Ассура
При расчете реакции во вращательной кинематической паре (рис. 4.25) необходимо иметь в виду, что давление со стороны звена i на звено k передается частью поверхности и распределено по этой поверхности по определенному закону. При расчете мы получим не эпюру распределения давлений, а только равнодействующую Fki , которая проходит
через центр шарнира, если не учитывать трение. Неизвестными остаются модуль и направление реакции, то есть для каждой вращательной пары два неизвестных. Для поступательной кинематической пары (рис. 4.26) известно направление реакции (перпендикулярно оси поступательной пары). Неизвестными остаются модуль и точка приложения реакции, то
144

есть тоже два неизвестных. В поступательной паре может встретиться случай, когда точка приложения реакции выходит за пределы направляющей звена k или даже за пределы звена i. Пусть реакции Fik′ , Fik′′ при-
ложены в точках d ′, d ′′ (рис. 4.27) и представляют систему двух антипа-
раллельных сил. Полученная при расчете равнодействующая Fki |
прило- |
|||||
жена в точке D. По правилу сложения антипараллельных сил получим |
||||||
F ′ = |
l1 + l2 |
F ; |
F ′′ = |
l1 |
F . |
(4.48) |
|
|
|||||
ik |
l1 |
ik |
ik |
l2 |
ik |
|
|
|
|
|
|
||
Рис. 4.25. Реакция во вращательной |
Рис. 4.26. Реакция в поступательной |
кинематической паре |
кинематической паре |
Рис. 4.27. Распределение нагрузки в поступательной кинематической паре
Поэтому расчет элементов кинематической пары надо вести с учетом нагрузки (4.48). Может быть и такой случай, когда реакции Fik′ , Fik′′ равны и противоположны, тогда при расчете получим равнодействующую Fki , равную нулю. При этом нагрузка будет выражена в виде пары сил. Для каждого звена на плоскости можно составить три уравнения равновесия типа (4.47), а для всех звеньев – 3n уравнений. Каждая пара пятого класса
145

на плоскости дает два неизвестных параметра при определении реакции, а все пары дадут 2p5 неизвестных. Если число уравнений равновесия равно числу неизвестных, то система будет статически определимой. Условие статической определимости:
3n = 2 p5 . |
(4.49) |
Это условие всегда удовлетворяется для групп Л.В. Ассура, поэтому удобно силовой расчет вести погруппно.
4.10.2Аналитическая статика групп Ассура второго класса
4.10.2.1.Группа второго класса первого вида
Группа состоит из двух звеньев и трех кинематических пар. Расчленим группу на два отдельных звена и будем рассматривать равновесие каждого звена. На рис. 4.28 через Si , Sk обозначены центры масс звеньев; ai , ak , α i ,α k – отрезки и углы, характеризующие положения центров масс относительно осей звеньев (ось звена рассматривается как отрезок, проведенный из центра одной кинематической пары в центр другой пары). Инерционная нагрузка для звена i находится из выражений
X i = −mi X Si 2; Yi = −miYSi 2; |
M zi = −J Si ε i , |
(4.50) |
где mi , J Si – масса и момент инерции звена i; |
X Si 2, YSi 2 – проекции уско- |
|
рения центра мacc; ε i – угловое ускорение звена. |
|
|
Рис. 4.28. Расчет группы 21
146
Аналогично для звена k:
X k = −mk X Sk 2; Yk = −mkYSk 2; M zk = −J Sk ε k . |
(4.51) |
Сюда же можно отнести и нагрузку, вызванную другими внешними силами, например, если учитывать силу тяжести звена i, то проекцию Yi следует вычислять из выражения
Yi = −miYSi 2 − mi g. |
(4.52) |
Эти формулы одинаковы для групп всех видов. |
|
Реакции во внешних кинематических парах |
обозначим |
FBx , FBy , FDx , FDy . Реакцию во внутренней кинематической паре обозначим
Fik (результирующая |
давления звена k на звено i) или |
в |
проекциях |
Fxik , Fyik . Реакция со стороны звена i на звено k обозначена Fki |
или в про- |
||
екциях Fxki , Fyki . При |
составлении уравнений равновесия |
необходимо |
|
учитывать, что
|
Fik = −Fki |
или Fxik = −Fxki ; |
Fyik = −Fyki . |
|
Рассмотрим равновесие звена i: |
|
|
||
FBx |
+ X i + Fxik |
= 0; |
|
(4.53) |
FBy |
+ Yi + Fyik |
= 0; |
|
(4.54) |
aixYi − aiy X i + M zi + li cos ϕ i Fyik |
− li sin ϕ i Fxik = 0, |
(4.55) |
||
где
aix |
= ai |
(cos ϕ i |
cos α i− |
sin ϕ |
i |
sin α |
i |
); |
aiy |
= ai |
(sin ϕ i |
cos α i− |
cos ϕ |
i |
sin α |
i |
). |
В уравнении (4.55) за полюс принята точка В. Анализ уравнений показывает, что при трех уравнениях имеем четыре неизвестных: FBx , FBy , Fxik , Fyik , то есть эти уравнения не определены.
Рассмотрим равновесие звена К:
FDx |
+ X k |
− Fxik |
= 0; |
(4.56) |
FDy |
+ Yk |
− Fyik |
= 0; |
(4.57) |
akxYk − aky X k + M zk − lk cos ϕ k Fyik + lk sin ϕ k Fxik = 0, |
(4.58) |
|||
где
147
akx |
= ak (cos ϕ k cos α k− |
sin ϕ |
k |
sin α |
k |
aky |
= ak (sin ϕ k cos α k− |
cos ϕ |
k |
sin α |
k |
);
).
В уравнении (4.58) за полюс принята точка О. Теперь в шести уравнениях имеем шесть неизвестных. В уравнениях (4.55) и (4.58) обозначим:
a11 = −li |
sin ϕ i ; a12 = li cos ϕ i ; a21 = li sin ϕ i |
a22 = −lk |
cos ϕ k ; b1= aiy X i− aixYi− M zi ; b2= aky X k− akxYk− M zk . |
С учетом этих обозначений имеем:
a11 Fxik + a12 Fyik = b1;
(4.59)
a21 Fxik + a22 Fyik = b2 .
Из этой системы найдем Fxik , Fyik :
∆ = a a − a a |
21 |
;∆ F = b |
a − b |
a ; |
|
|
|
|||||||||||||
|
11 |
22 |
|
21 |
|
|
xik |
1 |
22 |
2 |
|
12 |
|
|
|
|||||
∆ F |
= a |
|
b − |
|
b ; F = |
∆ F |
|
; |
|
= |
|
∆ |
Fyik |
. |
|
|||||
a |
|
xik |
|
F |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
||||||||||||||
yik |
11 |
|
2 |
21 |
|
1 |
xik |
∆ |
|
|
|
yik |
|
|
∆ |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Далее последовательно находим: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
FBx |
= − X i |
− Fxik ; |
FBy = −Yi |
− Fyik ; |
|
|
|
|
|
||||||||||
|
FDx |
= − X k |
+ Fxik ; |
FDy |
= −Yk + Fyik . |
|
|
|
|
|
||||||||||
4.10.2.2. Группа второго класса второго вида |
|
|||||||||||||||||||
Расчленим группу на два звена и рассмотрим равновесие каждого |
||||||||||||||||||||
звена (рис. 4.29). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Равновесие звена i: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
FBx + X i + Fxik |
= 0; |
|
|
|
|
|
|
|
|
|
|
|
|
(4.60) |
||||||
FBy |
+ Yi |
+ Fyik |
= 0; |
|
|
|
|
|
|
|
|
|
|
|
|
(4.61) |
||||
aixYi − aiy X i |
+ M zi + li cos ϕ i Fyik |
− li sin ϕ i Fxik |
= 0. |
(4.62) |
||||||||||||||||
Равновесие звена К: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
−Fxik |
+ X k |
+ FD cos(ϕ k |
+ 90°) = 0, |
|
|
|
|
(4.63) |
|||||||||||
|
−Fyik |
+ Yk + FD sin(ϕ k+ |
90° )= 0, |
|
|
|
|
|
(4.64) |
|||||||||||
|
akxYk |
− aky X k |
+ M zk + FD (DD′) = 0. |
|
|
|
|
(4.65) |
||||||||||||
148

Выразив Fxik , Fyik из (4.63), (4.64), подставим полученные выражения в (4.62), найдем реакцию FD во внешней поступательной паре:
F = |
lk sin ϕ i X k − li |
cos ϕ iYk |
+ aiy X i − aixYi − M zi |
. |
(4.66) |
||||||||
|
|
|
|
|
|||||||||
D |
l |
|
(cos ϕ |
|
cosϕ |
+ |
sinϕ |
|
sinϕ |
|
) |
|
|
|
k |
i |
i |
k |
|
|
|||||||
|
|
|
|
k |
|
|
|
|
|
||||
Далее последовательно находим:
Fxik |
= X k − FD sin ϕ |
k ; |
Fyik = Yk + FD |
cos ϕ k |
; |
FBx |
= −Fxik − X i ; |
FBy |
= −Fyik − Yi . |
|
(4.67) |
|
|
Рис. 4.29. Расчет группы 22
Если реакция FD получилась неравной нулю, то из (4.65) найдем величину (DD′) :
(DD′) = |
aky X k − akxYk − M zk |
. |
(4.68) |
|
|||
|
FD |
|
|
Если же FD получилась равной нулю, то из (4.65) найдем момент в поступательной паре:
FD (DD′) = aky X k − akxYk − M zk . |
(4.69) |
4.10.2.3.Группа второго класса третьего вида
Вэтой группе (рис. 4.30) внутренняя кинематическая пара является поступательной, реакция в ней обозначена Fik , и направлена она перпен-
дикулярно оси пары.
149

Рассмотрим равновесие звена i:
|
FBx |
+ X i + Fik cos(ϕ i |
+ 90°) = 0, |
(4.70) |
|||||
|
FBy |
+ Yi + Fik sin(ϕ i+ |
90° )= 0, |
(4.71) |
|||||
aixYi − aiy X i + M zi |
+ Fik (CC′) = 0. |
(4.72) |
|||||||
Равновесие звена К: |
|
|
|
|
|
|
|
|
|
FDx |
+ X i + Fik cos(ϕ k |
+ 270°) = 0, |
(4.73) |
||||||
FBy |
+ Yi + Fik sin(ϕ k+ |
270° )= 0, |
(4.74) |
||||||
akxYk − aky X k + M zk − ( |
|
S |
|
+ CC′)Fik = 0. |
(4.75) |
||||
|
|
||||||||
Рис. 4.30. Расчет группы 23
Выразим из (4.75) произведение (CC′)Fik , это же произведение найдем из (4.72), получим выражение для Fik .
F = |
akyYk − aky X k + M zk |
|
+ aixYi |
− aiy X i |
+ M zi |
. |
(4.76) |
|||
|
|
|
|
|
|
|||||
ik |
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
После этого найдем остальные неизвестные: |
|
|
|
|||||||
FBx |
= Fik sin ϕ i − X i ; FBy = −Fik |
cos ϕ i |
− Yi ; |
(4.77) |
||||||
FDx |
= −Fik sin ϕ k − X k ; |
FDy = Fik cos ϕ |
k − Yk . |
|||||||
|
||||||||||
150