

1505
.pdfРис. 3.18. Кинематическое исследование кулисного механизма: а – схема механизма; б – план механизма; в – план ускорений
На пересечении лучей находим точку b3, которая является концом вектора pb3 , VB3 = V ( pb3 );
VB3B1 = VB3B2 = V (b3b1 ) = V (b3b2 ).
Скорость точки D определяем из теоремы подобия
91

|
CD |
= |
pd |
pd = p b |
CD |
V = µ ( pd ). |
||||||
|
|
|
|
|
||||||||
|
CB |
pb |
1 3 CB |
|
D V |
|||||||
3 |
|
3 |
|
|
|
|
|
3 |
|
|
||
Скорости точек S и К находятся по аналогии с примером |
||||||||||||
|
|
|
ω 2= 0,ω =3 |
|
VB |
|
|
VB |
. |
|||
|
|
|
= |
|
|
3 |
||||||
|
|
|
|
|
|
3 |
|
|
|
|||
|
|
|
|
|
|
lCB |
|
(CB3 )µl |
|
|||
|
|
|
|
|
3 |
|
|
|
|
|
||
Направление ω 3 |
(см. рис. 3.18, а) |
находится по ранее введенному |
||||||||||
правилу. Полный план скоростей представлен на рис. 3.18, а. Для плана ускорений aB1 = aB2 .
По величине
|
|
|
|
2 |
|
V 2 |
|
a |
|
= a |
|
= ω |
l= |
B |
. |
B |
B |
|
|||||
|
|
1 |
1 |
l1 |
|||
|
1 |
|
2 |
|
|
||
|
|
|
|
|
|
||
Из полюса р2 плана ускорений параллельно АВ от схемы В к А откла-
|
|
|
|
|
|
aB |
(см. рис. 3.18, б). |
|
дываем вектор p b = p b ; |
µ = |
|||||||
1 |
||||||||
|
||||||||
1 1 1 2 |
|
a |
p1b1 |
|
||||
|
|
|
|
|
|
|
||
Для структурной группы 23 векторные уравнения для ускорений запишутся следующим образом:
|
|
|
|
|
|
|
|
|
|
|
|
|
rB3B2 , |
||||
|
|
|
= |
|
B2 + aBk B + |
|
|||||||||||
aB |
a |
a |
|||||||||||||||
|
3 |
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
(3.88) |
||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
= |
|
+ |
|
|
n + |
|
τB3C , |
|||||||
a |
|
a |
a |
a |
|||||||||||||
|
B |
|
C |
B C |
|
|
|
|
|
|
|||||||
|
|
|
3 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где akB3B2 – ускорение Кориолиса в движении точки В3 относительно точки В2 и вместе с ней;
arB3B2 – относительное ускорение точки В3 вокруг точки С, направлен-
|
|
|
|
|
n |
|
|
V |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ное вдоль |
СВ от В к С; aB3C = ω 2l |
|
= |
B3C |
; |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
3 |
B C |
lB C |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
τB3C – тангенциальное ускорение точки В3 относительно точки С, на- |
||||||||||||||||||
a |
||||||||||||||||||||
правленное перпендикулярно ВС. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
ak |
|
= 2V |
|
|
|
|
ω |
3 |
. |
|
|
|
|
||
|
|
|
|
|
B B |
|
B B |
|
|
|
|
|
|
|||||||
|
|
|
3 |
2 |
|
|
3 |
|
2 |
|
|
|
|
|
|
|
|
|||
Ему |
соответствует вектор |
|
|
|
, длина которого (мм) |
|||||||||||||||
|
b2m |
|||||||||||||||||||
(b2m) = aBk |
B / µa . Направление этого вектора определяется путем пово- |
|||||||||||||||||||
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
рота на 90° в направлении ω 3 |
относительной скорости |
|
B3B2 (или |
|
) |
|||||||||||||||
V |
b2b3 |
|||||||||||||||||||
из плана скоростей (см. рис. 3.18, а). В соответствии с первым уравне-
92

нием системы (3.88) b2m откладывается от точки b2, а затем из точки m проводим луч паралелльно В3С. По второму уравнению из точки С плана ускорений откладываем вектор cn1 параллельно ВС, направленный от В к С.
n
(cn ) = aB3C .
1 µa
Затем из точки n1 перпендикулярно ВС строится луч, соответствующий направлению aτB3C . На пересечении двух лучей фиксируем точку b3,
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
являющуюся концом вектора p1b3 |
– ускорения точки b3. |
||||||||||||||
Следовательно, |
|
|
|
|
|
|
|
|
|
|
|
|
|||
a |
= µ ( p b ); a z |
= µ (mb ); a |
τ |
|
= µ(n b ) . |
||||||||||
|
|
B3 |
a |
1 3 |
B3B2 |
a |
3 |
|
B3C |
a |
1 3 |
||||
Из подобия |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
= |
p1d |
p d = p b |
CD |
a |
|
= µ ( p d ). |
|||||||
|
|
|
|
|
|||||||||||
|
CB |
|
p b |
1 |
1 3 CB |
|
D |
a |
1 |
||||||
|
|
3 |
|
1 |
3 |
|
|
|
3 |
|
|
|
|
|
|
Ускорения точек S и К определяются из подобия с помощью принципа обхода контура СВК (см. рис. 3.18, б).
aS = a ( p1S ); ak = a ( p1k ).
Определяем угловое ускорение 3-го звена:
ε 3 = |
aBτ C |
= |
(n b )µ |
||
3 |
1 3 |
a |
; |
||
lB C |
lB C |
|
|||
|
|
|
|
||
|
3 |
|
3 |
|
|
направление ε 3 показано на рис. 3.18, б.
Методики графоаналитического исследования, приведенные в примерах (рис. 3.16–3.18), применяются при кинематическом исследовании более сложных стержневых механизмов.
3.9.4. Пятизвенный стержневой механизм
Построение плана скоростей
1.VA = VC = VX = 0.
2.VB1 =VB2 ;VB1 ,VB2 (скорость перпендикулярна звену АВ),
V =V = ω l → µ = |
VB1 |
. |
|||
|
|||||
B1 |
B2 |
1 AB |
V |
pb1 |
|
|
|
|
|
||
93

3. |
V |
B3 = |
V |
B2 |
+ |
V |
B3B2 |
(скорость VB3B2 |
параллельна звену ВС), |
|||||||||||||||||||
|
|
|
= |
|
C + |
|
|
B3C (скорость VB3C перпендикулярна ВС), |
||||||||||||||||||||
V B3 |
V |
V |
||||||||||||||||||||||||||
V = ( pb )μ; V = μ( pb ); |
V = (b b ) . |
|
|
|||||||||||||||||||||||||
|
B2 |
|
|
2 |
|
|
|
V B3 |
V |
3 |
B3B2 |
2 3 |
V |
|
|
|||||||||||||
4. ω |
3= |
|
|
|
VB C |
|
(угловая скорость звена). |
|
|
|
||||||||||||||||||
3 |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
µe (cb3 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
VDC |
|
= |
( pd ) |
= |
CD |
→ |
( pd=) |
|
CD |
( pb ); V |
= ( pd ). |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
VB C |
|
|
|
|
pb3 |
|
CB3 |
|
|
|
CB3 |
3 |
D |
V |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
При нахождении положения точки d плана скоростей используется правило обхода контура B3CD и bзсd (рис. 3.19, а).
5. V E = V X +V EX (скорость VEX параллельна х–х),
VE =VD +VED (скорость VED перпендикулярна ED).
VE |
= ( pe) V ; VED |
= V |
(de); ω 4= |
VED= |
VED |
. |
|
||||||
|
|
|
|
lED l4 |
||
Построение плана ускорений
1.аА = аС = аХ = 0.
2.aB1 = aB2 ; ускорения aB1 , aB2 параллельны звену АВ.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V 2 |
|
a |
B1 |
|
||
|
|
|
|
|
|
a |
|
= a |
|
|
= ω |
2l |
|
= |
|
B1 → |
µ = |
|
|
|
. |
|||
B |
B |
AB |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
a |
|
( p2b1 ) |
|||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
1 |
|
lAB |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
3. |
|
B3 = |
|
B2 + |
|
kB3B2 + |
|
2B3B2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
a |
a |
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
ak |
|
|
= 2ω V , (bk ) = |
aBk |
B |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
3 2 |
. |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
B B |
|
|
3 B B |
2 |
|
µa |
|
|
|||||||
|
|
|
|
|
|
|
|
3 |
2 |
|
|
|
3 |
|
|
|
|
|
|
|||||
Ускорение aBk |
B |
параллельно звену ВС, |
|
||||||||||||
|
|
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B3 = |
|
C + |
|
nB3C + |
|
tB3C , |
|||
|
|
|
|
a |
a |
a |
a |
||||||||
|
|
|
|
|
|
|
|
|
|
|
V 2 |
|
|||
|
|
|
|
|
an |
= ω 2l |
= |
B3C |
, |
||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
B C |
3 |
BC |
lBC |
|
|||||
|
|
|
|
3 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
(cn ) = |
aBn C |
, an |
параллельно звену ВС; |
at перпендикулярноВС. |
|||||||||||
3 |
|||||||||||||||
µa |
|||||||||||||||
1 |
|
B C |
|
|
|
|
|
|
|
|
|
|
B C |
||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
3 |
|
94

Графическое построение, согласно векторным уравнениям, приводится на рис. 3.19. По результатам этих построений получаем:
4.
aD
|
|
a |
B |
= ( p b ); |
at |
|
= |
|||||
|
|
|
|
|
a |
1 3 |
B C |
|
|
|||
|
|
|
3 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
ε 3 |
= |
aBt |
C |
|
|
|
|
|
|
|
|
|
|
3 |
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
lBC |
||
aDC |
= |
( p1d ) |
= |
CD |
→ ( p d=) |
|
|
|||||
|
|
|
|
|
||||||||
aB C ( p1b3 ) |
|
CB3 |
1 |
|
|
|
||||||
|
|
|
|
|
||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
= V ( p2d ).
(n1b3 )µa ; aBt 3B2 = µa (kb3 );
t
= aB3C .
µe (BC)
CD
CB3
( p1b3 );
Положение точки d плана ускорений находится по правилу обхода контура B3CD и bзcd (см. рис. 3.19, б).
5. |
|
E = |
|
E0 + |
|
nEE0 |
+ |
|
tEE0 |
; ( aEEk |
= 2ω E |
VEE |
= 0, ускорение |
|
τEE0 парал- |
a |
a |
a |
a |
a |
|||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
0 |
|
|
лельно неподвижной направляющей х–х).
|
|
|
|
|
n |
|
t |
= ω 42lED ; |
|
n |
нормальное ускорение, парал- |
|
|
|
|
|
|||||||
a E = aD + a ED + a ED ( aEDn |
a ED – |
||||||||||
τ
лельное звену ED; a ED – тангенцильное ускорение, перпендикулярное звену ED).
По результатам графического построения векторных уравнений
a |
|
= ( p e); a |
τ |
= µ (n |
e); ε |
|
= |
aEDτ |
. |
||
E |
ED |
L |
|
||||||||
|
a |
2 |
a |
2 |
|
|
lED |
||||
|
|
|
|
|
|
|
|
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Планы скоростей и ускорений механизма в заданном положении изображены на рис. 3.19 а, б.
а
Рис. 3.19. Кинематическое исследование пятизвенного механизма: а – схема механизма; б – план скоростей; в – план ускорения
95

б
в
Рис. 3.19. Окончание
Аналитический метод кинематического анализа рычажных механизмов
Рассмотрим такой случай сборки механизма, когда при обходе по часовойстрелкесохраняется контурспоследовательностьюABCDA (рис. 3.20).
96

Рис. 3.20. Схема кривошипно-ползунного механизма |
D |
|
Задача о положениях
Уравнение замкнутости векторного контура запишется в виде
|
l |
1 + |
l |
2 + |
l |
3 + |
l |
4 = 0. |
(3.89) |
В проекциях на оси системы координат ХАY уравнение (3.89) представляется зависимостями
l1 cos ϕ 1 + l2 cos ϕ 2 = l4 |
, |
||||
l sin ϕ |
+ l |
2 |
sinϕ |
= e, |
(3.90) |
1 |
1 |
|
2 |
|
|
так как φ3 = 270°, φ4 = 180°. Из второго уравнения системы (3.90) определяется угол φ2, характеризующий положение шатуна:
|
sin ϕ |
= |
e − l1 sin ϕ 1 |
= |
|
λ e− sin ϕ |
1 |
; |
|
|
|
(3.91) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
2 |
|
l2 |
|
|
|
λ 2 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
ϕ 2= |
arcsin( |
λ e− |
sin ϕ |
1 |
). |
|
|
|
|
|
(3.92) |
|||||
|
|
|
2 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
λ |
|
|
|
|
|
|
|
|
|
|
||
Текущее положение ползуна (точка С) находится по формуле |
|
|||||||||||||||||
|
xc = l4 = l1 cos ϕ 1 + l2 cos ϕ |
2 |
= l1 cos ϕ |
1 + l2 , |
|
|
|
|
||||||||||
|
λ e− sinϕ |
1 |
2 |
|
|
|
|
|
|
|
sinϕ |
1 |
|
2 |
|
|||
1 − |
|
= l2 cos ϕ 1+ λ |
2 |
|
λ |
−e |
|
|
. |
(3.93) |
||||||||
λ 2 |
|
|
|
λ 2 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
97

Максимальный ход ползуна
H = l |
4 max |
− l |
4 min |
= (l |
2 |
+ l )2 |
− e2 |
− (l |
2 |
+ l2 )2 e2 |
= |
|
|
|
1 |
|
|
|
|
||||
|
= l ( (λ 2+ 1)2− λ |
1− λ( −2 |
1)−2 λ |
|
2 ). |
|
|||||
|
1 |
|
|
|
|
e |
|
|
|
e |
|
Текущее перемещение ползуна относительно одного из крайних положений, например, левого:
|
|
|
|
|
|
|
|
|
(λ e− |
sinϕ 1 )2 |
|
2 |
2 |
|
|
S |
= x |
− l |
= l cos ϕ |
|
+ λ |
|
1− |
|
|
|
− (λ − |
1)− λ |
|
. |
|
|
|
|
λ |
22 |
|
||||||||||
c |
c |
4 min |
1 |
|
1 |
|
2 |
|
|
2 |
|
e |
|
||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задача о скоростях
Используя результаты решения задачи о положениях, угловую скорость шатуна можно найти дифференцированием по времени (3.91):
|
|
|
|
|
d |
(sin ϕ |
2 ) = cos ϕ |
2ω 2= − |
cos ϕ |
1ω |
1 |
|
||||||||||
|
|
|
|
|
dt |
λ |
2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
ω = − |
|
|
|
cos ϕ |
1 |
ω |
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 |
|
|
cos ϕ λ2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||
Таким образом, |
|
|
|
|
|
ω |
|
= |
u ω |
1 |
, |
|
|
|
|
|
|
|
(3.94) |
|||
|
|
|
|
|
|
|
|
|
2 |
|
21 |
|
|
|
|
|
|
|
|
|
||
где u21 = − |
|
cos ϕ 1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
λ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
2 cos ϕ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость ползуна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
V |
= |
dSc |
= −l (ω |
1 |
sin ϕ |
1 |
+ λ ω |
|
2 |
sin ϕ |
2 |
). |
(3.95) |
|||||
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
c |
|
dt |
1 |
|
|
|
2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задача об ускорениях
Эта задачи решается путем дифференцирования первых производных, полученных для определения скоростей:
|
ε |
2 |
= |
d ω |
2 |
= − |
|
cos ϕ 1 |
|
(sin ϕ |
1 |
cosϕ |
2 |
ω − sin ϕ |
2 |
cosϕ |
1 |
ω |
2 |
). |
(3.96) |
||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
dt |
|
|
|
λ |
2 cos2ϕ |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
a |
|
= |
dVc |
|
− l |
(cos ϕ |
ω 2+ λ |
2 |
cos ϕ |
2 |
ω |
2+ ε |
1 |
sin ϕ |
1 |
+ λ |
ε |
2 |
sin ϕ |
2 |
). |
(3.97) |
|||||||||||
c |
|
||||||||||||||||||||||||||||||||
|
|
|
dt |
1 |
|
|
1 |
1 |
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для определения положений центров масс звеньев (например, точка S2 шатуна) и других точек звеньев (например, точка К) записываем векторные уравнения
98

l1 + l BS2 = l S2 , |
|
l1 + l BK = l k . |
(3.98) |
В проекциях на оси координат перемещения этих точек в соответствии с соотношениями (3.98) будут следующими:
|
|
|
|
|
xC = l1 cos ϕ |
1 +lBS |
cos ϕ |
2 ; |
|
|
|
|
|
||
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
xk = l1 cos ϕ 1 + lBK cos(ϕ |
2 + ϕ k ); |
|
(3.99) |
||||||||
|
|
|
|
|
yc 2 = l1 sin ϕ |
1 + lBS sin ϕ |
2 ; |
|
|
|
|
|
|||
|
|
|
|
|
yk = l1 sin ϕ 1 + lBK sin(ϕ ϕ2 |
k ). |
|
|
|
|
|||||
Дифференцируя соотношения (3.99), получим скорости точек S2 и К: |
|||||||||||||||
|
|
|
|
xS2 |
|
|
|
|
2ω |
|
|
|
|
|
|
|
|
|
|
= −l sin ϕ 1ω 1+ λ BS2 sin ϕ |
2 ; |
|
|
|
|
||||||
|
|
|
|
xk |
= −l [ω 1 sin ϕ 1 + λ k ϕ 2 sinϕ |
2ω |
k ]; |
|
(3.100) |
||||||
|
|
|
|
ys 2 |
= −l1 [ω 1 cos ϕ 1 + λ BS 2ϕ 2 cos ω 2 ]; |
|
|
|
|
||||||
|
|
|
|
yk |
= −l1 [ω 1 cos ϕ 1 + λ k ϕ 2 cos ω |
2 ]. |
|
|
|
|
|||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
xk2 |
||
|
|
2 |
2 |
ϕ S2= arccos |
xS2 |
|
|
2 |
|
2 |
|
|
|||
VS2 |
= |
xS2 |
+ yS2 ; |
|
; Vk = |
xS2 |
+ yS2 ; |
ϕ Vk= |
arccos |
|
, |
||||
|
|
||||||||||||||
|
|
|
|
|
VS2 |
|
|
|
|
|
|
Vk |
|||
где ϕ S 2 ,ϕ |
Vk |
– направляющий угол вектора полной скорости относительно |
|||||||||||||
оси АХ. Следует учесть, что φk – const. Аналогичным способом находятся ускорения точек S2 и К:
|
xS |
= −l1 |
ω |
12 cos ϕ 1 |
+ λ BS |
ϕ |
22 cos ω |
2+ ε |
1 sinω |
+1ε λ |
2 BS |
sin ϕ |
2 |
|
; |
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
xk |
= −l ω |
12 cosϕ |
+1 λ ϕ k |
22 cos(ϕ + ϕ 2 + ε k ) ϕ 1+sinε λ |
1 |
ϕ2 +k ϕsin( 2 |
|
|
k ) |
; |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yS2 |
|
|
−ω 1 |
sin ϕ 1 + λ |
BS2 ϕ 2 |
× |
|
sin ϕ 2 + ε |
1 cosω |
+1 ε λ |
2 |
BS2 |
cos ϕ |
|
; |
|
|
|||||||||
= l1 |
|
2 |
|
|
||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yk = l |
|
−ω |
2 sinϕ |
+ λ |
ϕ |
2 sin(ϕ + ϕ |
2 |
+ ε |
k |
) ϕ |
1 |
+cosε λ |
1 |
ϕ |
+cos(ϕ |
2 |
|
|
k |
) |
; |
|||||
1 |
|
|
1 |
|
|
1 |
BS2 |
2 |
|
|
|
|
2 |
k |
|
|
|
|
|
|||||||
|
|
|
2 |
|
2 |
|
|
|
|
xS2 |
|
|
|
|
2 |
2 |
|
|
|
|
|
|
xk2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aS2 = |
|
xS2 + yS2 |
; |
ϕ aS2= |
arccos |
|
|
; |
|
ak= |
|
xk+ |
yk ; |
ϕ k= |
arccos |
|
. |
|
||||||||
|
aS2 |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ak |
|
|
||
Примечание. В некоторых механизмах длина шатуна существенно больше длины кривошипа, т.е. λ2 << 1 . В этом случае для определения
99
кинематических характеристик используют приближенные, более простые по сравнению с соотношениями (3.91)–(3.100) формулы, полученные на основе разложения радикалов в ряд по формуле бинома Ньютона.
Шарнирный четырехзвенник
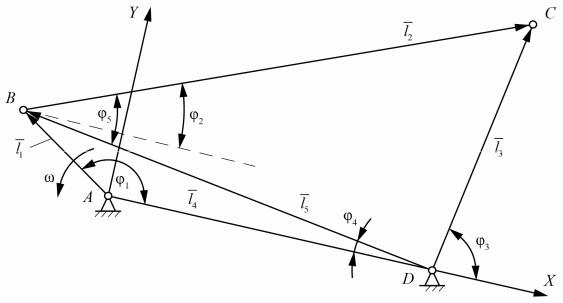
Кинематический анализ проводим для схемы механизма, представленной на рис. 3.21. Система координат выбирается так, чтобы ось АХ была направлена от точки A до D.
Уравнение замкнутого векторного контура АВСD имеет вид
|
l |
1 + |
l |
2 = |
l |
3 + |
l |
4 . |
(3.101) |
Рис. 3.21. Схема шарнирного четырехзвенника
В проекциях на оси координат это уравнение записывается следующим образом:
l1 cos ϕ 1 + l2 cos ϕ 2 |
= l3 cos ϕ 3 + l4 ; |
|
l1 cos ϕ 1 + l2 cos ϕ |
2 = l3 cos ϕ 3 , |
(3.102) |
так как φ3 = 0.
Соотношение (3.102) удобно использовать при решении задач о скоростях и ускорении. При определении же положения звеньев пользуются более удобными для решения на ЭВМ формулами.
100