

428
.pdf
|
|
|
|
1+ s2 (t −τ)2 |
− s (t −τ) |
|
0 |
|
|||||||
|
(G×τ−t )−1 = −s (t −τ) |
|
|
|
1 |
|
0 , |
(8) |
|||||||
|
|
|
|
0 |
|
|
|
|
0 |
|
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
(G× |
) = 3 + s2 |
(t −τ)2 , I |
3 |
(G× |
|
) =1, θ(G× |
) = 0 . |
(9) |
||||||
1 |
τ−t |
|
|
|
|
|
|
τ−t |
|
τ−t |
|
|
|||
С учетом (5)–(9) соотношение (2) конкретизируем в виде |
|
||||||||||||||
|
|
|
|
s2t |
2 1+ s2t2 |
|
− st |
0 |
|
(1−α(t ))+ |
|
||||
Q(t )=µa g − 1 |
+ |
|
|
|
−st |
|
|
|
1 |
0 |
|
|
|||
3 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
0 |
|
|
|
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α(t ) |
|
|
|
|
|
s |
2 |
(t −τ) |
2 |
1+ s2 (t |
−τ)2 |
|||||||
+ ∫ |
|
|
|
|
|
|
|
|
|
−s (t −τ) |
|
|||||||
µкр g − |
+ |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
3 |
|
|
|
||||||||||||
1 |
|
|
|
|
|
|
|
|||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α(t ) |
|
|
|
|
|
s2τ2 1+ s |
2 |
τ |
2 |
|||||||
|
|
∫ |
|
|
|
|
|
|
|
|
||||||||
|
+ |
µa |
g − 1 |
+ |
|
|
|
|
|
−sτ |
|
|
|
|||||
|
3 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− s (t −τ) |
0 |
|
|
|
|
|
|||
|
1 |
0 dα(τ)+ |
||
|
0 |
|
|
|
|
1 |
|
||
|
|
|
|
|
− sτ |
0 |
|
|
(10) |
1 |
0 |
dα(τ). |
||
0 |
1 |
|
|
|
|
|
|
|
|
Соотношения (10) – нелинейные физические соотношения для кристаллизующейся упругой среды, учитывающие конечные деформации материала, для случая простого сдвига.
Для линеаризации уравнения введем в рассмотрение промежуточную конфигурацию, близкую к текущей [5]. Близость конфигураций определяется равенством R = R0 +ε u , где u – вектор перемеще-
ния точки; ε – малый формальный параметр; R0 – радиус-вектор точ-
ки в промежуточной конфигурации, близкой к текущей; R – радиусвектор точки в текущей конфигурации. Связь радиус-векторов промежуточной и текущей конфигураций позволяет получить представления всех кинематических величин, определяющих (2), удерживая слагаемые, линейные относительно параметра ε:
G×t = G×t0 + 2εe* ,
(G×t )−1 = (G×t0 )−1 −2ε(G×t0 )−1 e* (G×t0 )−1 ,
I1 (G×t )= I1 (G×t0 )+ 2εI1 (e* ),
61

I3 (G×t )= I3 (G×t0 )+ I3 (G×t0 )(G×t0 )−T 2e* , |
(11) |
|||||
I3−5 6 (G×t )= I3−5 6 (G×t0 )− |
10 εI3−5 6 (G×t0 )(G×t0 )−T |
e* , |
||||
|
|
|
6 |
|
|
|
θ(G×t )= θ(G×t0 )+ |
|
ε |
|
εI3 (G×t0 )(G×t0 )−T e* , |
||
I3 |
(G×t0 ) |
|||||
|
|
|
||||
где e = (h +hT )/ 2 , e* = FtT0 e Ft0 |
, |
h = ( 0u)T , 0 – оператор Гамиль- |
||||
тона относительно промежуточной конфигурации, близкой к текущей. Подставляя соотношения (11) в (2) и также удерживая только линейные слагаемые относительно параметра ε, получаем линеаризованные определяющие соотношения, представленные в работе [6], в которые входят уже известные на текущий момент кинематические величины
в промежуточной конфигурации итензор малых деформаций e* .
Для рассматриваемого случая деформирования все необходимые тензорные и скалярные величины имеют вид
|
0 |
|
|
0 |
|
0 |
|
1 |
|
) |
|
|
u = s(t −t |
0 |
) |
0 |
|
0 , |
G× |
= s (t −t |
0 |
||
0 |
0 |
|
|
|
|
0 |
t0 −t |
|
|
||
|
|
|
0 |
|
|
|
0 |
|
|
||
|
|
|
|
|
0 |
|
|
s (t −t0 ) |
|
|
|
|
|
2e = s (t −t0 ) |
0 |
|
|
||||||
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
s (t −t0 ) |
|
|
|
2e* = s (t −t0 ) |
2s2 (t −t0 )t0 |
|
||||||||
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
I |
3 |
(G× |
) =1, θ(G× ) = 0 . |
|||
|
|
|
|
|
|
t0 |
|
t0 |
|
|
|
s (t −t0 )
1
0
0
0 ,
0
0
0 ,
0
0
0 ,
1
С учетом полученных соотношений линеаризованные определяющие соотношения для случая простого сдвига имеют вид
|
× |
) |
|
|
|
Q(t )= Q(t0 )− µa g − |
I1 (Gt0 |
(G×t0 )−1 |
|
(α(t )−α(t0 ))+ |
|
3 |
|
||||
|
|
|
|
|
|
62
|
|
|
|
I1 |
|
|
|
× |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+µa 2 |
(Gt0 |
(G×t0 |
)−1 e* (G×t0 )−1 − 32 I1 (e* )(G×t0 )−1 |
(1−α(t ))+ |
|
|
|
|||||||||||||||||||||||||
|
|
3 |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
+ µkpg(α(t )−α(t0 ))+ |
|
|
|
|
|
|
|
|
|
|
|||||||
|
α(t0 ) |
|
|
I1 |
|
|
× |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
+ µкp ∫ |
2 |
(Gτ−t0 |
(G×τ−t0 )−1 e* (G×τ−t0 )−1 − 32 I1 (e* )(G×τ−t0 )−1 |
dα(τ)+ |
||||||||||||||||||||||||||||
|
3 |
|
||||||||||||||||||||||||||||||
0 |
|
(G×t0 |
) |
|
|
|
|
|
|
|
|
(G×t0 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
I1 |
|
× |
|
|
−1 |
|
2I1 |
× |
|
−1 |
* |
× |
|
−1 |
|
2 |
|
* |
× |
|
−1 |
|||||||||
|
g − |
|
|
|
|
|
|
|
(Gt0 |
) |
|
+ |
|
|
(Gt0 |
) |
|
e |
(Gt0 |
) |
|
− |
|
I1 |
(e )(Gt0 |
) |
|
|
||||
+ µa |
|
3 |
|
|
|
|
|
3 |
|
|
3 |
|
. |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(α(t )−α(t0 ))−1 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Рассмотрим частный случай: материал подвергается простому сдвигу, находясь в аморфном состоянии при температуре выше температуры фазового превращения ( α(t )= 0 ).
Тогда получаем нелинеаризованные и линеаризованные определяющие соотношения в виде
Q(t )= µa |
|
|
|
s2t2 1+ s2t2 |
− st |
0 |
|
|
|||
g − 1 |
+ |
|
|
−st |
1 |
0 |
|
, |
|||
3 |
|||||||||||
|
|
|
|
|
0 |
0 |
1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
) |
|
|
|
|
Q(t )= Q(t0 )+ µa 2 |
I1 (Gt0 |
(G×t0 |
)−1 e* (G×t0 )−1 − |
32 I1 (e* )(G×t0 )−1 |
. |
|
3 |
|
|||||
|
|
|
|
|
|
|
Одноосная деформация
(12)
(13)
Пусть растяжение происходит в направлении оси Ox . Компоненты вектора перемещений и радиус-векторы произвольной точки тела в начальной и текущей конфигурации имеют вид
ux = stx , uy = 0 , uz = 0 , r = xi + yj+ zk ,
R = (stx + x)i + yj+ zk .
Аналогичным случаю простого сдвига образом получаем все величины, входящие в исходные соотношения.
63

|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
(1+ st ) 2 0 |
0 |
|
|
|
|
(1+ st ) |
2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
G×t |
= |
0 |
1 |
0 , (G×t )−1 = 0 |
|
|
|
1 |
|
0 , |
|
|
|||||||||
|
|
|
|
0 |
0 |
|
|
|
|
|
|
0 |
|
|
|
0 |
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I (G×) = |
(1+ st )2 |
+ 2 , I |
3 |
(G×) = |
(1+ st )2 |
, θ(G×) = st , |
|
|
|
|||||||||||
|
|
1 |
|
t |
|
|
|
|
t |
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
1+ st 2 |
0 |
|
|
|
|
|
|
|
|
1 |
+ sτ 2 |
0 |
|
|
|
|
||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
||||
Gτ−x |
|
1 |
+ sτ |
1 |
0 |
|
, |
(G×τ−t ) |
−1 |
= |
|
1 |
+ st |
1 |
|
0 |
|
, |
||||
t = |
0 |
|
|
|
|
|
0 |
|
|
|
|
|
||||||||||
|
|
0 |
|
|
0 |
1 |
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
(G× |
) = |
|
1+ st 2 |
+ 2 , |
I |
|
(G× |
) = |
|
1+ st 2 |
, θ(G× |
) = |
s(t −τ) |
. |
|
|
3 |
|
|
|
||||||||||
1 |
τ−t |
|
|
|
τ−t |
|
τ−t |
|
1+ sτ |
||||||
|
|
|
|
1+ sτ |
|
|
|
|
|
|
1+ sτ |
|
|
||
Нелинейные определяющие соотношения (2) для случая одноосного растяжения конкретизируем в виде
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
0 |
0 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
(1+ st )2 |
|
|
|
|
(1+st) |
2 |
|
|
|||||||||||||||
Q(t )= µa (1+ st ) |
−5 3 |
|
− |
+ |
2 |
|
|
|
|
|
1 |
0 |
|
−α(t ))+ |
||||||||||||||||
|
|
g |
|
|
|
3 |
|
|
|
|
0 |
|
|
|
|
|
|
(1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
(1+ st ) |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
0 |
|
(1 |
−α(t ))+ |
|
|
|
|
|||||||
|
|
+Ba st |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
+ st |
|
2 |
|
|
|
|
|
1+ sτ 2 |
|
|
|
|
||||||||
α(t ) |
|
|
|
−5 3 |
|
|
|
|
+ 2 |
|
|
|
|
|
|
|
0 |
|
0 |
|
||||||||||
|
1+ st |
|
|
|
|
+ sτ |
|
|
1+ st |
|
|
|||||||||||||||||||
+ ∫ |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
µкр |
|
|
g − |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
1 |
|
0 |
dα(τ)+ |
||||||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
0 |
|
1+ sτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
64

α(t )
+ ∫
0
|
|
|
|
|
1+ sτ 2 |
|
|
|
|
|
|
Bкр |
s(t −τ) |
|
1+ st |
||
|
|
|
0 |
|
|
1 |
+ sτ |
|
|||
|
|
0 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
0
1
0
0
0 dα(τ)+
1
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|||
α(t ) |
|
(1+ sτ)2 |
+ 2 |
|
|
|
|||||
|
|
||||||||||
−5 3 |
|
|
|
1+ sτ |
1 |
0 |
|
||||
+ ∫ µa (1+ sτ) |
|
g − |
3 |
|
|
0 |
|
|
dα(τ)+ |
||
0 |
|
|
|
|
0 |
|
|
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
α(t ) |
|
|
|
|
0 |
|
|||||
+ ∫ |
|
|
1 + sτ |
1 |
|
Ba sτ |
0 |
|
|
||
0 |
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0
0 d α (τ). (14)
1
Линеаризуя соотношения (14) также для частного случая (материал подвергается одноосному растяжению, находясь в аморфном состоянии при температуре выше температуры фазового превращения ( α(t )= 0 )), получаем нелинеаризованные и линеаризованные опреде-
ляющие соотношения в виде
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
(1 |
+ st )2 |
|
(1 |
+st) |
2 |
|
|||||||||
Q(t )=µa (1+ st ) |
−5 3 |
|
|
|
+ 2 |
|
1 |
0 |
|
+ |
|||||||||
|
g − |
|
3 |
|
|
|
0 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
(1+st) |
2 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
+ Ba st |
0 |
|
|
|
|
1 |
|
|
|
0 |
; |
|
|
|
|||||
|
|
|
0 |
|
|
|
|
0 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
65

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
) |
|
|
|
|
|
|
|||
Q(t )= Q(t0 ) −µa |
10 I3−5/6 (G×t0 )(G×t0 )−T |
ea* g |
− |
I1 (Gt0 |
(G×t0 |
)−1 |
+ |
||||||||||||||||||||
|
|
||||||||||||||||||||||||||
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
× |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+µa I3−5/6 (G×t0 ) |
2 |
I1 (Gt0 |
(G×t0 )−1 ea* (G×t0 )−1 − |
32 I1 (ea* )(G×t0 )−1 |
+ |
|
|
||||||||||||||||||||
3 |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
I3 (Gt0 |
)(Gt0 ) |
−T |
ea |
(Gt0 |
) |
−1 |
− 2θ(Gt0 |
)(Gt0 |
) |
−1 |
ea |
(Gt0 |
) |
−1 |
|
||||||||||
+Ba |
, |
||||||||||||||||||||||||||
|
|
|
× |
|
× |
|
* |
× |
|
× |
× |
|
* |
|
× |
|
|
||||||||||
|
I3 (G×t0 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где
|
|
|
1+ st |
|
2 |
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
||||
|
|
1+ st |
|
|
s(t −t |
) (1+st |
) |
|||||
|
|
|
|
|||||||||
G×t0 |
−t = |
0 |
|
0 |
|
1 |
0 |
|
, e* =(h+hT )/2= 0 |
0 |
0 |
|
|
|
0 |
|
|
|
0 |
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I3 (G×t0 ) = (1+ st0 )2 , θ(G×t ) = st0 .
0 |
0 |
|
0 |
|
, |
0 |
||
0 |
0 |
|
|
|
|
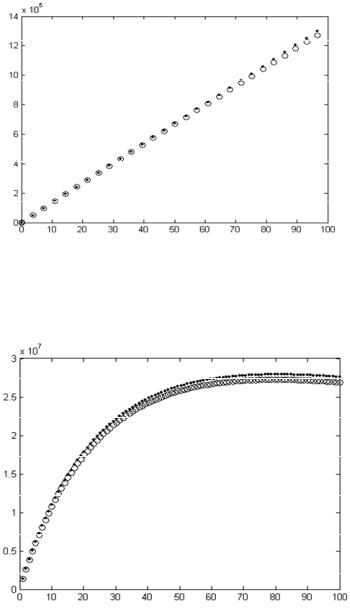
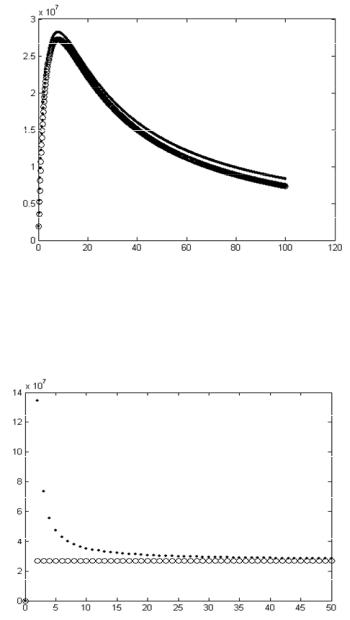
На примере рассмотренных процессов деформирования для частного случая (материал является полностью аморфным) показано (рис. 2, 6), что в случае малых деформаций (скорость деформирования s = 0,001) напряжения, полученные в рамках теории конечных деформаций с использованием линеаризованных определяющих соотношений, практически совпадают с напряжениями, полученными в рамках теории малых деформаций. На рис. 3, 4, 7, 8 приведено сопоставление результатов расчета, полученных в рамках теории конечных деформаций с использованием линеаризованных и нелинеаризованных определяющих соотношений. Рис. 5 и 9 иллюстрируют сходимость результатов, полученных с использованием линеаризованных соотношений, с увеличением количества шагов по времени к точному решению. Все
расчеты проведены для модуля продольной упругости E =108 Н/м2, коэффициента Пуассона ν = 0,3.
66
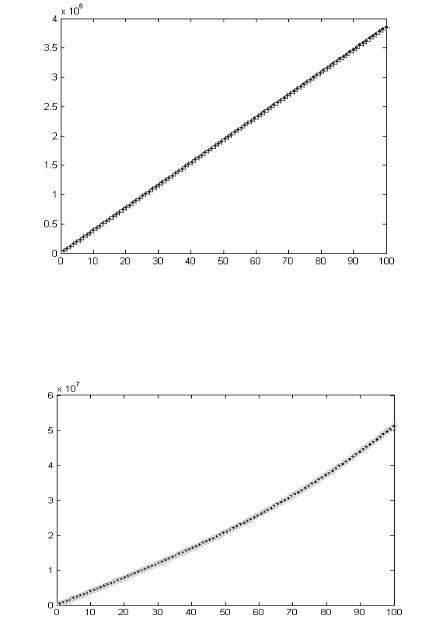
Qxy , Н/м2
2
1
t,c
Рис. 2. Зависимость компоненты тензора напряжений Qxy для аморфного полимера от времени: s = 0,001;
1 – в рамках теории больших деформаций с использованием линеаризованных определяющих соотношений;
2 – в рамках теории малых деформаций
Q xy , Н/м2
1 |
2 |
|
t,c
Рис. 3. Зависимость компоненты тензора напряжений Qxy для аморфного полимера от времени: s = 0,01;
1 – в рамках теории больших деформаций с использованием нелинеаризованных определяющих соотношений;
2 – в рамках теории больших деформаций с использованием линеаризованных определяющих соотношений
67

Q xy , Н/м2
2
1
t, c
Рис. 4. Зависимость компоненты тензора напряжений Qxy для аморфного полимера от времени: s = 0,1;
1 – в рамках теории больших деформаций с использованием нелинеаризованных определяющих соотношений;
2 – в рамках теории больших деформаций с использованием линеаризованных определяющих соотношений
Q xy , Н/м2
1 2
n
Рис. 5. Зависимость компоненты тензора напряжений Qxy для аморфного полимера от количества шагов по времени на момент времени: t = 100 c, s = 0,1;
1 – в рамках теории больших деформаций с использованием нелинеаризованных определяющих соотношений;
2 – в рамках теории больших деформаций с использованием линеаризованных определяющих соотношений
68
Q xx , Н/м2
2
1
t, c
Рис. 6. Зависимость компоненты тензора напряжений Qxx для аморфного полимера от времени: s = 0,001;
1 – в рамках теории больших деформаций с использованием линеаризованных определяющих соотношений;
2 – в рамках теории малых деформаций
Q xx , Н/м2
1
2
t, c
Рис. 7. Зависимость компоненты тензора напряжений Qxx для аморфного полимера от времени: s = 0,001;
1 – в рамках теории больших деформаций с использованием линеаризованных определяющих соотношений;
2 – в рамках теории больших деформаций с использованием нелинеаризованных определяющих соотношений
69
Qxx , Н/м2
1
2
t, c
Рис. 8. Зависимость компоненты тензора напряжений Qxx для аморфного полимера от времени: s = 0,1;
1 – в рамках теории больших деформаций с использованием линеаризованных определяющих соотношений;
2 – в рамках теории больших деформаций с использованием нелинеаризованных определяющих соотношений
Q xx , Н/м2
1
2
N/10
Рис. 9. Зависимость компоненты тензора напряжений Qxx для аморфного полимера от количества шагов по времени N на момент времени t = 100 c, s = 0,1; 1 – в рамках теории больших деформаций с использованием линеаризованных определяющих соотношений; 2 – в рамках теории больших деформаций с использованием нелинеаризованных определяющих соотношений
70