

Математическое моделирование и проектирование систем автоматики
..pdfаналоговой вычислительной машины, а параметр +U2 должен формироваться как искомый результат моделирования на выходе интегрирующего блока ОУ1 этой машины в точке В. Но благодаря инвертированному свойству этого блока в этой точке результат отрицательный, поэтому для дальнейшего суммирования он должен поменять знак. Эта операция выполняется операционным блоком ОУ2, после ее результат с соответствующим масштабным коэффициентом из точки С подается к точке А этой модели. Результат этого моделирования также снимается в точке С.
Аналоговая модель колебательного звена. Колебательным называют такое динамическое звено системы автоматики, которое не только способно запасать энергию, но и может и производить обмен этой энергией между элементами этого звена. Прямая модель колебательного звена представлена на рис. 18, а.
а |
б |
Рис.18. Структурная схема прямой (а) и непрямой (б) модели колебательного динамического звена
В этой модели катушка индуктивности L является элементом, способным запасать энергию источника U1, а затем отдавать ее через сопротивление R для зарядки конденсатора С. Заряженный конденсатор, разряжаясь через это сопротивление, вновь способствует накоплению энергии катушкой индуктивности L.
61
Таким образом, в этом звене возникает колебательный процесс перетока энергии от элемента L к элементу С и обратно.
Математическая модель этого вида динамического звена описана уравнением (15).
d 2U 2 |
+ |
R dU |
2 |
+ |
C |
U |
2 |
− |
C |
U |
1 |
=0. |
(15) |
||
|
|
|
|
|
|
|
|||||||||
dt 2 |
L dt |
|
|
|
|||||||||||
|
|
|
L |
|
L |
|
|
||||||||
Эта математическая модель может быть реализована в непрямом варианте на аналоговой вычислительной машине по схеме, представленной на рисунке 18, б. Согласно структуре алгоритма этой модели вторая производная параметра U2 формируется на входе интегрирующего блока ОУ1, куда одновременно должны подаваться остальные слагаемые. Первая производная напряжения U2 появляется с отрицательным знаком на выходе усилителя ОУ1, которую через инвертирующий блок ОУ3 с положительным знаком и со множителем R/L подаем для сложения на вход блока ОУ1. Одновременно этот параметр подается на вход другого интегрирующего блока ОУ2, с выхода которого получаем искомый результат в виде параметра напряжения U2, который напрямую с множителем С/L подается для суммирования на вход блока ОУ1. Четвертым слагаемым должен быть параметр U1, который как входной сигнал модели подается от встроенного источника напряжения аналоговой вычислительной машины с масштабным коэффициентом, зависящим от параметра С/L. Все слагаемые на входе этого блока подаются через масштабирующие сопротивления, которые определяются величиной соответствующего множителя.
Аналоговая модель последовательного соединения апериодического и колебательного звана. Структура такой модели в прямом варианте показана на рис. 19, а. Математическая модель этой динамической системы описывается системой уравнений (16). Каждое из уравнений этой системы ранее было рассмотрено нами.
62

Рис. 19. Структурная схема прямой (а) и непрямой (б) модели последовательного соединения двух динамических звеньев
|
|
dU 2 |
+ |
R1 |
U 2 − |
|
R1 |
U1 =0, |
|
|
|||||||||
|
|
dt |
L1 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
L1 |
|
|
|
|
|
|
(16) |
||||
d 2U 3 |
|
|
R |
|
|
dU 3 |
|
|
C2 |
|
|
|
|
C2 |
|
|
|||
|
+ |
|
|
+ |
U |
3 |
− |
U |
2 |
=0. |
|||||||||
dt 2 |
L 2 dt |
|
|
|
|||||||||||||||
|
|
|
L2 |
|
|
|
L2 |
|
|||||||||||
В прямой математической модели параметр U2 является точкой сопряжения этих динамических звеньев (в точке D). Аналогично происходит сопряжение этих звеньев и в схеме их соединения по непрямой модели. Параметр U3 является иско-
63
мой величиной процесса этого вида моделирования. Структура модели апериодического звена, входящего в соединение с колебательным звеном, остается неизменной. Результирующий параметр этого звена подается на вход через сопротивление R3 на вход модели колебательного звена той же структуры.
2.3. Цифровые математические модели
Цифровая математическая модель представляет собой вычислительное устройство (обычно ЭВМ), с помощью которого по некоторому алгоритму производится решение уравнений этой модели. Такое решение в большинстве случаев выполняется приближенными методами, в которых заданная точность решения является определяющей.
2.3.1. Точность решения цифровой математической модели
Различают два вида точности результата решения уравнений математической модели: абсолютную и относительную.
Под абсолютной точностью решения уравнений мате-
матической модели понимают разность между истинным значением моделируемого параметра и его значением, полученным в результате моделирования. Величина абсолютной точ-
ности описывается уравнением следующего вида: |
|
∆а = Хи − Хi , |
(17) |
где Хи − истинное значение моделируемого параметра; |
Хi − |
значение моделируемого параметра, полученное при моделировании.
Как правило, истинное значение моделируемого параметра Хи заранее не известно, поэтому при решении уравнений модели численным или итерационным методом абсолютная точность решения оценивается как
∆а = Хi − Хi−1 , |
(18) |
64
где Хi − решение, полученное на текущей итерации (повторении); Хi–1 − решение, полученное на предыдущей итерации (повторении).
Если такая разность (абсолютная точность решения) становится меньше заранее заданного значения [ ∆ ], то величина Х, равная половине разности, полученной из уравнения (18), считается конечным (приближенным) результатом решения уравнений математической модели. Численные методы решения уравнений называют итерационными.
Под относительной точностью решения уравнений ма-
тематической модели понимают отношение абсолютной точности решения к истинному значению моделируемого параметра. Относительная точность описывается уравнением следующего вида:
∆а = |
Ха − Хi |
, |
(19) |
|
|||
|
Ха |
|
|
где Ха − абсолютная точность моделируемого параметра.
Для численного (итерационного) метода решения оно
принимает вид |
|
|
|
∆а = |
Хi − Хi−1 |
. |
(20) |
|
|||
|
X i |
|
|
Относительная точность решения – безразмерная величина, поэтому она более удобна для оценки точности решения в итерационных методах решения математических моделей.
Если решение задачи математической модели в аналоговом варианте определяется структурным набором и взаимодействием решающих блоков, то в цифровом варианте решения этой модели структура вычислителя постоянна. В этом случае при решении задачи математической модели меняется лишь алгоритм управления вычислительным процессом.
65

2.3.2. Структура вычислителя цифровой математической модели
Вычисление результата цифровой математической модели осуществляется с помощью ЭВМ, играющей роль вычислителя цифровой математической модели. Структура такого вычислителя показана на рис. 20.
Рис. 20. Структура вычислителя для цифровой математической модели
Основу этого вычислителя составляет арифметическологическое устройство (АЛУ), с помощью которого по заданному алгоритму производится вычисление уравнений математической модели.
Ввод алгоритма и исходных данных для этой модели осуществляется через устройство ввода, которое преобразует эти данные в форму, понятную для ЭВМ. Алгоритм решения числовой математической модели записывается во внешнюю память (ВЗУ), а в процессе его выполнения он переносится в оперативное запоминающее устройство (ОЗУ). Устройство управления реализует каждую команду этого алгоритма в конкретные действия как АЛУ, так и других устройств этого вычислителя.
Результат вычисления цифровой математической модели сохраняется в оперативной памяти, но только в форме двоич-
66
ного числа, понятного для ЭВМ, но совершенно не понятного для тех, кто использует этот вид моделирования.
Для перевода результата вычисления математической модели в форму, понятную для большинства пользователей математического моделирования, в состав вычислителя вводится устройство вывода.
2.3.3. Алгоритм вычисления результата цифровой математической модели и его свойства
Алгоритм – это формальная последовательность действий, однозначно приводящая к желаемому результату. Алгоритмом вычисления результата цифровой математической модели называют последовательность действий при решении уравнений математической модели.
Алгоритм обладает следующими свойствами:
–дискретность;
–результативность, т.е. в результате его выполнения получают некоторый результат или сообщение об ошибке (о причинах невозможности выполнения данного алгоритма);
–определенность, т.е. сколько бы раз не был реализован определенный алгоритм с неизменными исходными данными, его результат должен быть неизменен;
–массовость, т.е. определенный алгоритм всегда справедлив для любых исходных данных, если они не противоречат самому алгоритму.
2.3.3.1. Формы представления алгоритма
Алгоритм может быть представлен в следующих формах:
–словесной;
–структурной;
–схемной;
–программной.
67

Словесная форма алгоритма представляет собой описание некоторой последовательности действий при выполнении некоторой операции.
Структурная форма представления алгоритма характе-
ризуется изображением некоторой последовательности действий с помощью специальных графических символов, представленных в табл. 2.
Таблица 2
Графические символы для структурного отображения алгоритма
|
Графический |
|
Значение |
|
|
Описание |
|
||||
|
|
символ |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Начало, конец |
Структурная форма начало, конец |
|||||
|
|
|
|
|
предполагает запуск или оста- |
||||||
|
|
|
|
|
|
новку алгоритма |
|
|
|||
|
|
|
|
|
|
Структурная форма ввод, вывод |
|||||
|
|
|
|
|
|
предполагает ввод в память ЭВМ |
|||||
|
|
|
|
|
Ввод, вывод |
исходных данных или вывод на |
|||||
|
|
|
|
|
|
внешний носитель |
полученного |
||||
|
|
|
|
|
|
результата |
|
|
|
||
|
|
|
|
|
|
Структурная |
форма |
следование |
|||
|
|
|
|
|
|
||||||
|
|
|
|
|
Следование |
предполагает наличие в алгорит- |
|||||
|
|
|
|
||||||||
|
|
|
|
|
|
ме некоторых действий матема- |
|||||
|
|
|
|
|
|
тического или физического типа |
|||||
|
|
|
|
|
|
Структурная |
форма |
ветвление |
|||
|
|
|
|
|
Ветвление |
предполагает наличие в алгорит- |
|||||
|
|
|
|
|
ме |
возможности следования по |
|||||
|
|
|
|
|
|
одному из двух возможных на- |
|||||
|
|
|
|
|
|
правлений |
|
|
|
||
|
|
|
|
|
|
Структурная форма цикл предпо- |
|||||
|
|
|
|
|
|
лагает |
многократное |
повторение |
|||
|
|
|
|
|
Цикл |
по заданному условию некоторой |
|||||
|
|
|
|
|
|
части |
алгоритма, |
|
называемой |
||
|
|
|
|
|
|
телом цикла |
|
|
|
||
|
|
|
|
|
|
Структурная форма подпрограм- |
|||||
|
|
|
|
|
Подпрограмма |
ма |
предполагает |
многократное |
|||
|
|
|
|
|
|||||||
|
|
|
|
|
обращение по заданному усло- |
||||||
|
|
|
|
|
|
вию к некоторой части алгоритма |
|||||
|
|
|
|
|
|
с новыми исходными данными |
|||||
68
Программная форма представления алгоритма характе-
ризуется некоторой последовательностью команд конкретного алгоритмического языка. Алгоритмические языки могут быть машинно-ориентированными (язык машинных команд) или языками высокого уровня программирования (язык проблемных задач).
Машинно-ориентированные языки понятны для исполнения любой ЭВМ, в то время как проектировщикам эти языки малопонятны. Языки высокого уровня, наоборот, близки по структуре к языку математического описания объекта, поэтому более понятны пользователям ЭВМ, но их совершенно не понимают вычислительные машины.
Для устранения этого парадокса используются специальные программы – трансляторы (переводчики), которые преобразуют программы, написанные на языках высокого уровня, в последовательную совокупность машинных команд.
2.3.3.2. Типы алгоритмических структур для вычисления результата цифровой математической модели
Алгоритмы цифровых математических моделей структурно строятся по следующим схемам:
1)линейной;
2)ветвления;
3)циклической.
Влинейном алгоритме операторы (команды) следуют постоянно друг за другом. Структура такого алгоритма показана на рис. 21.
После запуска этого алгоритма производится ввод исходных данных, на основе которых происходит вычисление необходимого результата, который затем выводится на твердый носитель или на экран дисплея.
Валгоритме ветвления направление следования операторов (команд) определяется выполнением заданного условия ветвления.
69
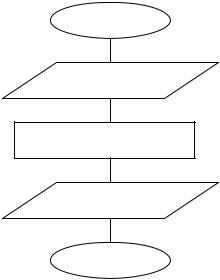
НАЧАЛО
Исходные данные
Вычисление результата
Вывод результата
КОНЕЦ Рис. 21. Вид линейной структуры алгоритма
Структура такого алгоритма показана на рис. 22. После запуска этого алгоритма, как и в предыдущем случае, производится ввод исходных данных, на основе которых затем вычисляется условие ветвления. При анализе истинности этого условия оператором (командой) ветвления алгоритм может следовать по одному из двух направлений.
Вслучае если заданное условие истинно, то алгоритм следует по направлению «да» и при этом выполняется оператор «Вычисление 1». В противном случае он следует по направлению «нет», врезультатечеговыполняетсяоператор«Вычисление2».
Вциклическом алгоритме производится многократное выполнение определенной части программы, называемой телом цикла. Циклические алгоритмы бывают двух типов:
1.Циклы с заданным числом повторений относят к типу
«ДЛЯ».
2.Циклы с повторением по условию относят к типу «ПОКА».
70