

Математическое моделирование и проектирование систем автоматики
..pdfАрхив – это совокупность сведений (файлов), требующих постоянного хранения. В архивы заносят файлы вариантов проработки проекта и даже результаты старых проектных проработок.
Система управления базами данных СУБД включает совокупность программных пакетов, предназначенных для управления вводом исходных массивов и их последующей обработки.
Программы управления вводом массивов обеспечивают бе-
зошибочный ввод исходных данных, формирование ключевых реквизитов введенных массивов, а также формирование взаимоувязанных файлов по выбранным ключевым реквизитам. Такие файлы называются индексированными.
Обработка массивов предполагает их сортировку по выбранному ключевому реквизиту, поиск записей по ключевым реквизитам и постоянное обновление записей в массивах.
51
2. МОДЕЛИРОВАНИЕ РАБОЧИХ ПРОЦЕССОВ СИСТЕМ АВТОМАТИКИ
Созданию работоспособного и надежного образца нового технического объекта способствуют научные исследования, выполняемые на первом этапе конструирования с целью определения объективных технических требований к этому объекту. Достоверность этих требований значительно возрастает в том случае, если удается предварительно смоделировать рабочий процесс нового технического объекта, поэтому составной частью научного поиска технических требований к новому техническому объекту является процесс моделирования его рабочих режимов при различных условиях его работы. При этом могут быть использованы различные виды этого моделирования.
2.1. Виды моделей процессов систем автоматики
Процесс моделирования рабочих режимов технического объекта может быть использован в следующих формах:
–физического моделирования;
–математического моделирования.
2.1.1. Физическое моделирование рабочих процессов технических объектов
Физическая модель – это уменьшенная (или увеличенная) копия моделируемого объекта (оригинала), выполненная по определенным принципам. Принципы, по которым строятся физические модели, включают в себя подобие и масштабность модели по отношению к оригиналу.
Масштабом физической модели называют отношение ее линейных размеров к линейным размерам оригинала. Если масштаб больше единицы, то физическая модель – уменьшен-
52
ная копия оригинала и наоборот. Примером физических моделей могут быть уменьшенные копии самолетов, автомобилей, плотин гидростанций и т.д.
Подобием физической модели называют пропорциональ-
ность физических свойств модели оригиналу, а также полное соответствие алгоритма их работы. Это значит, что прочностные, нагрузочные и другие параметры физической модели должны быть выполнены в определенном пропорциональном соотношении к таким же параметрам оригинала. Нарушение принципа подобия искажает результат моделирования. Например, если физическая модель плотины (уменьшенная ее копия) будет сделана из того же материала (прочного бетона) и к ней будут приложены те же нагрузки, то достоверность результата такого моделирования будет сильно нарушена, так как размеры модели будут значительно искажать конечный результат.
2.1.2. Математическое моделирование рабочих процессов технических объектов
Математической моделью технического объекта называют комплекс уравнений, описывающих поведение технического объекта (оригинала). Способ вычисления результата таких моделей делит их на аналоговые и цифровые.
2.2. Аналоговые математические модели
Аналоговые математические модели представляют собой некоторые физические устройства, работающие по принципам, описанным уравнениями этих моделей. Различные физические процессы могут быть описаны уравнениями одного типа (аналогичными уравнениями), поэтому для реализации такой математической модели может быть выбран один из этих физических процессов.
Так, процесс протекания электрического тока по проводнику описывается уравнением (1), а уравнением (2) описывается процесс передачи теплового потока через некоторую сплош-
53

ную среду с коэффициентом проводимости тепла ρ. Оба этих процесса описаны аналогичными по типу уравнениями, поэтому один из них может быть аналоговой моделью другого.
i = |
1 |
|
du |
|
, |
(1) |
|||
ρ |
dx |
||||||||
|
|
|
|
|
|||||
q =λ |
|
dT |
. |
(2) |
|||||
|
|
||||||||
|
|
|
|
dx |
|
|
|
||
Такие модели принято считать прямыми аналоговыми моделями, так как характер поведения одного из этих физических процессов может моделировать другой. За аналоговую модель при этом выбирают тот процесс, который более прост в реализации. Примеры некоторых прямых аналоговых моделей показаны на рис. 13.
а |
б |
в г
Рис. 13. Разновидности прямых аналоговых моделей
График, представленный на рис. 13, а, является нагрузочной характеристикой транзистора, которая может быть смоделирована процессом слива жидкости разного уровня через от-
54
верстие на дне сосуда (рис. 13, б). Аналогия этих двух процессов наблюдается в скачкообразной идентичности характера проявления выходных сигналов. Если в транзисторе каждый скачок тока в направлении «эмиттер – коллектор» проявляется при очередном скачке тока «базы», то при стоке жидкости через донное отверстие при увеличении напора (давления) ступенчато возрастает длина выброса струи этой жидкости из отверстия. В этом проявляется аналогия этих двух физических процессов.
Аналогия двух других процессов (рис. 13, в, г) состоит в том, что в первом процессе сопротивление трубы Ri последовательно изменяет напор жидкости Hi в гидросистеме. Во втором процессе аналогичный процесс протекает в токовой цепи, сопротивление которой Ri на каждом ее участке также изменяет напряжение Ui на этих участках.
2.2.1. Прямые и непрямые аналоговые модели
Рассмотренные в этих примерах аналоговые модели представлены моделями прямого типа, так как в основе их работы был заложен определенный физический процесс без дополнительного подвода внешней энергии. В противоположность этому существуют модели непрямого типа, выполненные в форме электрической схемы с применением внешних источников энергии от операционного усилителя.
Вопрос о принадлежности аналоговой модели к тому или иному типу рассмотрим на примере аналоговых моделей, реализующих принципы суммирования и интегрирования исходных параметров.
Принцип построения модели суммирования нескольких исходных параметров рассмотрим на примере сложения нескольких токовых величин, подходящих к общему узлу. Расчетная схема такой модели представлена на рис. 14.
55

По этой модели необходимо определить суммарное значение тока, выходящего из узла, к которому стекаются несколько входящих токов.
Рис. 14. Схема прямой математической модели сложения исходных параметров
По закону Киргоффа значение тока, выходящего из узла, равно сумме значений входящих токов, или
|
|
|
|
in =i1 +i2 +i3. |
|
|
|
|
||||||||||||||||
Если |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i = |
U |
, |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
то |
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U n |
|
= |
U1 |
+ |
U 2 |
|
+ |
U 3 |
|
|
|
|||||||||||
|
|
R |
n |
|
|
R |
|
|
|
|
R |
2 |
|
|
|
R |
3 |
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U n = |
Rn |
U1 + |
Rn |
U 2 |
+ |
Rn |
U 3. |
|||||||||||||||||
R1 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
R2 |
|
|
|
|
|
R3 |
|
|
|
|
||||||||
Если |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К1 |
= |
Rn |
; К2 |
= |
|
Rn |
; К3 = |
Rn |
, |
|||||||||||||||
|
|
|
||||||||||||||||||||||
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|
R3 |
||||
(3)
(4)
(5)
(6)
(7)
то |
|
U n = K1U1 + K2U 2 + K3U3 , |
(8) |
где К1, К2, К3 – масштабные коэффициенты модели.
56
Таким образом, при сложении нескольких исходных параметров модели ее выходной параметр будет равен сумме исходных значений, умноженных на соответствующий масштабный коэффициент.
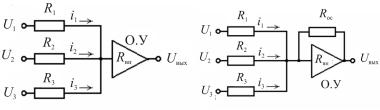
Прямая аналоговая модель суммирующего процесса обладает малой чувствительностью по выходному сигналу. Для увеличения этой чувствительности используют электронный усилитель сигнала, который своим внутренним сопротивлением Rвн заменяет сопротивление нагрузки Rn в прямой модели. В результате такой замены мы получим уже непрямую аналоговую модель, представленную на рис. 15, а.
а б
Рис. 15. Схема непрямой аналоговой модели суммирования исходных параметров без обратной связи (а); с обратной связью (б)
Замена в модели сопротивления нагрузки Rn внутренним сопротивлением усилителя приводит к нестабильности результата этой модели из-за нестабильности внутреннего сопротивления Rвн усилителя, что является серьезным недостатком такого вида модели.
Этот недостаток устраняется включением сопротивления обратной связи Rос между входом и выходом усилителя (рис. 15, б), которое стабилизирует параметры усилителя и модели в целом. Полученная модель тоже относится к типу непрямой. Ее масштабные коэффициенты рассчитываются по следующим формулам:
К1 = |
Rос |
; К2 |
= |
Rос |
; К3 = |
Rос |
. |
(9) |
|
|
|
||||||
|
R1 |
|
R2 |
R3 |
|
|||
57

Усилитель в этой модели считается операционным. Он должен обладать следующими свойствами:
1.Иметь высокий коэффициент усиления (К = 4·104–108).
2.Обеспечивать инверсность выхода относительно входа (это дает возможность обеспечить вычитание исходных параметров).
3.Иметь способность к масштабированию выходного сигнала за счет использования масштабных коэффициентов.
Масштабные коэффициенты могут быть вещественными (смешанными) числами, это расширяет возможности аналоговых моделей.
Прямая аналоговая модель интегрального процесса представлена на рис. 16, а, математическая модель которого описывается уравнением (10).
U вых = |
1 t |
U вхdt . |
(10) |
||
|
|
||||
RC ∫0 |
|||||
|
|
|
|||
Для непрямого моделирования интегрального процесса в обратную связь операционного усилителя вместо сопротивления включают конденсатор (рис. 16, б), при этом величина масштабного коэффициента определяется по следующей формуле:
Ki = RC1 . (11)
Эта модель имеет такие же недостатки, что и прямая модель суммирующего процесса, поэтому также требует использования операционного усилителя.
Прямая аналоговая модель дифференциального процесса
представлена на рис. 16, в, математическая модель которого описывается уравнением (12).
U вых = −RC |
dU вх |
. |
(12) |
|
|||
|
dt |
|
|
Эта модель имеет те же недостатки, поэтому также требует использования операционного усилителя в форме, представленной на рис. 16, г. В непрямой дифференциальной модели конден-
58
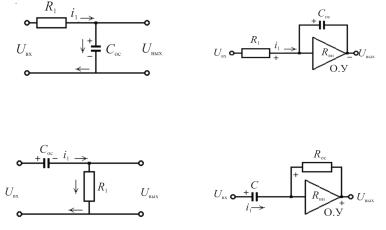
сатор включается на вход операционного усилителя, а в его обратную связь включают активное сопротивление Rос. Масштабныйкоэффициентэтоймодели находится изуравнения(13).
Ki = RC. |
(13) |
а |
б |
в |
г |
Рис. 16. Схема прямой (а) и непрямой (б) интегрирующей и прямой (в) и непрямой (г) дифференцирующей аналоговой модели
Непрямая модель дифференцирующего звена обладает еще одним недостатком, который проявляется в том, что при определенных значениях масштабного коэффициента теряется стабильность моделируемого процесса, в результате чего он переходит в режим автоколебаний.
Непрямые аналоговые математические модели чаще всего реализуются на аналоговых вычислительных машинах, основу которых составляют операционные блоки (усилители) суммирующего, интегрирующего и дифференцирующего типов.
59

2.2.2. Примеры аналоговых моделей динамических звеньев элементов автоматики
Аналоговая модель апериодического звена. Прямая модель этого звена представлена на рис. 17, а.
аб
Рис. 17. Структурная схема прямой (а) и непрямой (б) модели апериодического звена
В этой модели катушка индуктивности L является элементом, способным к накоплению энергии от источника U1, а сопротивление R препятствует перетоку этой энергии к потреби-
телю U2.
Уравнение (14) является математической моделью этого вида динамического звена.
dU |
2 |
+ |
R |
U |
2 |
− |
R |
U |
1 |
=0. |
(14) |
dt |
|
|
|
||||||||
|
|
L |
|
L |
|
|
|||||
Непрямая аналоговая модель этого динамического звена показана на рис. 17, б. Для ее решения используют структурные блоки аналоговой вычислительной машины.
Смысл алгоритма этой модели следующий: согласно уравнению (14), первая производная параметра U2 складывается алгебраически с произведением параметра R/L соответственно на множители U1 и U2. В представленном алгоритме
производная U2' формируется на входе интегрирующего блока
ОУ1, одновременно в этой же точке алгебраически складываются параметры –(R/L)U1 и (R/L)U2. Параметр U1 как входной сигнал модели подается от встроенного источника напряжения
60