

Анализ и синтез одноконтурных систем автоматического регулирования т
..pdfМинистерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Пермский национальный исследовательский политехнический университет»
С.И. Сташков, М.С. Орехов
АНАЛИЗ И СИНТЕЗ ОДНОКОНТУРНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ
Утверждено Редакционно-издательским советом университета
в качестве учебно-методического пособия
Издательство Пермского национального исследовательского
политехнического университета
2014
УДК 65.011.56 С78
Рецензенты:
кандидат технических наук, доцент П.Ю. Сокольчик (Пермский национальный исследовательский политехнический университет);
кандидат технических наук, доцент А.В. Пантелеймонов (ООО «ЛУКОЙЛ-Пермьнефтеоргсинтез»)
Сташков, С.И.
С78 Анализ и синтез одноконтурных систем автоматического регулирования технологических параметров : учеб.-метод. пособие / С.И. Сташков, М.С. Орехов. – Пермь : Изд-во Перм. нац. исслед. политехн. ун-та, 2014. – 99 с.
ISBN 978-5-398-01192-0
Рассмотрены основные понятия теории автоматического регулирования. Приведены структурные схемы одноконтурных систем автоматического регулирования (САР) и их элементов, а также принципы их функционирования. Описаны динамические и частотные характеристики САР, основные законы регулирования, критерии устойчивости САР и показатели качества регулирования.
Предназначено для студентов химико-технологических специальностей очной и заочной форм обучения.
УДК 65.011.56
ISBN 978-5-398-01192-0 |
© ПНИПУ, 2014 |
|
СОДЕРЖАНИЕ |
|
Список сокращений............................................................................................ |
4 |
|
Введение.............................................................................................................. |
5 |
|
Часть 1. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ........................................................ |
6 |
|
1. |
Общие сведения о системах управления................................................. |
6 |
2. |
Понятие передаточной функции............................................................. |
11 |
3. |
Динамические характеристики САР и ее элементов............................ |
17 |
4. |
Частотные характеристики ..................................................................... |
24 |
5. |
Типовые динамические звенья ............................................................... |
28 |
6. Соединение звеньев................................................................................. |
36 |
|
7. |
Идентификация объекта управления ..................................................... |
40 |
8. |
Типовые законы регулирования............................................................. |
46 |
9. |
Определение оптимальных настроек регуляторов ............................... |
51 |
10. Устойчивость.......................................................................................... |
53 |
|
11. Показатели качества.............................................................................. |
63 |
|
Контрольные вопросы................................................................................. |
69 |
|
Часть 2. ПРАКТИЧЕСКИЕ ЗАДАНИЯ.......................................................... |
70 |
|
Задание № 1 .................................................................................................. |
70 |
|
Задание № 2 .................................................................................................. |
75 |
|
Задание № 3 .................................................................................................. |
78 |
|
Задание № 4 .................................................................................................. |
83 |
|
Задание № 5 .................................................................................................. |
86 |
|
Задание № 6 .................................................................................................. |
89 |
|
Задание № 7 .................................................................................................. |
92 |
|
Приложение 1. Свойства преобразования Лапласа....................................... |
96 |
|
Приложение 2. Преобразование Лапласа некоторых функций.................... |
97 |
|
Список литературы .......................................................................................... |
98 |
|
3
СПИСОК СОКРАЩЕНИЙ
АСУ – автоматизированная система управления АСУ ТП – автоматизированная система управления техноло-
гическим процессом АЧХ – амплитудно-частотная характеристика
ИИС – информационно-измерительная система ИМ – исполнительный механизм ИУ – исполнительное устройство
КЧХ – комплексно-частотная характеристика ОУ – объект управления
П – пропорциональный (регулятор/закон регулирования)
ПИ – пропорционально-интегральный (регулятор/закон регулирования)
ПИД – пропорционально-интегрально-дифференциальный (регулятор/закон регулирования)
ПИП – первичный измерительный преобразователь Р – регулятор РО – регулирующий орган
САР – система автоматического регулирования ТОУ – технологический объект управления УУ – управляющее устройство ФЧХ – фазовая частотная характеристика
ХТП – химико-технологический процесс
4
ВВЕДЕНИЕ
Технический уровень химической промышленности на современном этапе ееразвития во многомопределяетсяуровнем управления.
Современное химическое или нефтехимическое производство является высокоавтоматизированным производством. Автоматизированное управление химическим производством позволяет значительно увеличить производительность труда и повышает социальную эффективность труда, т.е. облегчается труд обслуживающего персонала, улучшаются санитарно-гигиенические условия их работы, повышается культурный и профессиональный уровень специалистов.
Автоматизированное управление химическим производством позволяет не только улучшить качество производимой продукции, снижая ее себестоимость, но и уменьшить отрицательное воздействие химического предприятия на окружающую среду и пр.
Уровень автоматического управления химическим предприятием определяется экономическими условиями. Затраты на автоматическое управление химико-технологическими процессами (ХТП) могут доходить до 20 % от стоимости основного технологического оборудования. Практический опыт последних лет показывает, что внедрение автоматических систем управления (АСУ) повышает технико-экономические показатели производства даже без замены или реконструкции основных фондов. Экономическая эффективность достигается прежде всего за счет основных преимуществ АСУ перед человеком.
Первая часть пособия содержит теоретические сведения, а также снабжена примерами, наглядно иллюстрирующими методы анализа и синтеза систем автоматического регулирования (САР). Примеры выделены отдельным заголовком.
Во второй части пособия приводятся задания для самостоятельного выполнения.
5
Часть 1 ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
1. Общие сведения о системах управления
Системы управления современными химико-технологическими процессами характеризуются большим количеством технологических параметров, число которых может достигать нескольких тысяч. Для поддержания требуемого режима работы (а в конечном итоге качества выпускаемой продукции) все эти величины необходимо поддерживать постоянными или изменять поопределенному закону.
Решение задачи управления такими процессами вручную не всегда представляется возможным вследствие ограниченности возможностей операторов по быстродействию, точности, безошибочности действий и т.д. Управление в таких случаях возможно только путем применения автоматических регуляторов и управляющих устройств (т.е. автоматических и автоматизированных систем управления).
Любой объект управления (регулирования) определяется следующими основными группами переменных.
Переменные, характеризующие состояние процесса. Их необ-
ходимо поддержать на определенном заданном уровне или изменять по определенному закону в соответствии с технологическим регламентом. Вектор управляемых величин измеряется непосредственно либо с помощью модели по другим непосредственно измеряемым переменным. Таким образом, состояния любого объекта управления (ОУ) можно характеризовать вектором управляемых величин y(t) размерностью n. При построении замкнутых систем регулирования в качестве управляемых координат выбирают технологические параметры, изменение которых свидетельствует о нарушении материального или теплового баланса.
Переменные, изменением которых СУ может воздействовать на ОУ с целью управления, – вектор управляющих (регулирующих) воздействий μ(t) с размерностью m ≤ n.
6
Управляющие воздействия – организованные воздействия, реализуемые исполнительными устройствами. Возможные регулирующие воздействия – это изменение материальных или тепловых потоков.
Переменные, изменения которых не связаны с воздействием системы регулирования. Эти изменения отражают влияние на регулируемый объект внешних условий, изменения характеристик самого объекта и т.п. Их называют возмущающими воздействиями ν(t). Воз-
мущающие воздействия делят на контролируемые возмущения, которые позволяют ввести в систему управления дополнительную информацию для повышениякачества ееработы, инеконтролируемые.
По характеру и особенностям влияния на поведение объекта возмущающие воздействия делят на внутренние и внешние. Внутренние возмущения – возмущения, которые совпадают с каналом управляющего воздействия. Внешние возмущения – изменение внешних условий функционирования системы.
Математическая модель системы или объекта управления представляют в виде уравнения
F y, , 0,
где F – некоторый векторный оператор.
Действие возмущений на объект управления может быть аддитивным, тогда модель содержит две составляющие:
F y, , F1 y, F2 y, 0.
Если характер воздействия на объект управления относится к мультипликативному, тогда модель принимает вид
F y, , F y, 0.
Формально любое мультипликативное возмущение сводится к эквивалентному аддитивному.
Анализ ТП как объекта управления предполагает оценку статических и динамических свойств по каждому из каналов от любого
7
возможного управляющего воздействия к любому возможному управляемому (регулируемому) параметру, а также оценку аналогичных характеристик по каналам связи управляемых переменных
ссоставляющими вектора возмущений.
Входе такого анализа определяется структура САР, т.е. решается задача выявления конкретных регулирующих воздействий относительно конкретных регулируемых величин, поэтому выделяются контуры регулирования для каждой регулируемой величины, т.е. определяется некоторая совокупность одноконтурных САР. Эта задача является достаточно сложной при разработке систем автоматизации технологических установок, не имеющих прототипа.
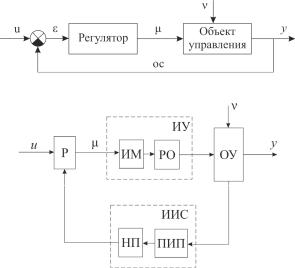
Простейшая система автоматического регулирования (САР) одной регулируемой величины представлена на рис. 1. В данной схеме имеются два основных элемента – объект управления (ОУ) и регулятор; стрелками указаны взаимодействия между ними.
а
б
Рис. 1. Схема одноконтурной САР: а – структурная схема; б – функциональная структурная схема
8
На рис. 1, а представлена структурная схема наиболее распространенной САР, в которой реализован принцип управления по отклонению. Рассмотрим принцип действия данной САР. На вход системы вводится задание u, т.е. такое значение, на котором должна поддерживаться регулируемая величина y. По обратной связи (ОС) на сумматор (обозначается в виде кружка) поступает текущее значение регулируемой величины y. Причем это значение поступает со знаком «–». Такая обратная связь называется отрицательной. На выходе сумматора формируется сигнал, равный разности между заданием u и значением регулируемой величины (выхода объекта) y, называемой рассогласованием или ошибкой:
u y.
При появлении рассогласования (отличного от нуля) регулятор оказывает на объект управляющее воздействие μ, так чтобы свести это рассогласование к допустимому минимуму (в идеальном случае к нулю). Таким образом, реализуется основной принцип управления.
Как правило, в физических САР управляющее воздействие μ реализуется посредством исполнительного устройства, в состав которого могут входить регулирующий орган и исполнительный механизм (рис. 1, б).
Отклонение регулируемой величины y от ее заданного значения u может происходить как вследствие изменения самого заданного значения u, так и вследствие действия на объект управления различного рода возмущений ν извне (внешних возмущающих воздействий).
Наряду с системами, работающими по отклонению, существуют системы, в которых реализованы принципы управления по задающему воздействию, управление по возмущающему воздействию, управление по отклонению и комбинированное управление. Структурные схемы таких систем управления представлены на рис. 2.
9
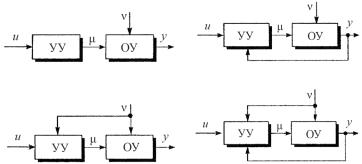
а |
в |
б |
г |
Рис. 2. СтруктурныесхемыСАУ, реализующие: а– управлениепозадающему воздействию; б– управлениеповозмущающемувоздействию; в– управление по отклонению; г – комбинированное управление
Таким образом, приведем некоторые определения. Управление – это процесс формирования и реализации управ-
ляющихвоздействий, направленныхна достижениенекоторойцели. Цель управления – достижение желаемых результатов функ-
ционирования объекта.
Объект управления – объект, для достижения результатов функционирования которого необходимы и допустимы специально организованные воздействия.
Под объектом управления (ОУ) в химической технологии по-
нимают технологический процесс, осуществляемый в определенном аппаратурном оформлении, в котором один или несколько химикотехнологических параметров, характеризующих состояние процесса, поддерживаются на заданном уровне или изменяются по определенному закону. В химической промышленности к типовым ОУ относят реакторы, массообменные колонны, теплообменники, насосы, вентиляторы и другие аппараты и устройства технологических установок, включая трубопроводы.
Под технологическим объектом управления (ТОУ) понимают совокупность технологического оборудования и реализуемого в нем технологического процесса.
10