

Анализ и синтез одноконтурных систем автоматического регулирования т
..pdf7.1. Аппроксимация объекта управления
Аппроксимация – это замена одних математических описаний объектов другими, в том или ином смысле близкими к исходным.
Например, предположим, что передаточная функция объекта управления имеет вид последовательного соединения апериодического звена первого порядка и звена запаздывания. В этом случае одноконтурную систему управления, приведенную на рис. 1, можно представить в виде, приведенном на рис. 13.
Рис. 13. Одноконтурная САР
Передаточные функции апериодического звена первого порядка и звена запаздывания имеют вид согласно (6) и (8) соответственно. Тогда передаточная функция объекта управления будет иметь вид
W ( p) |
|
Kоб |
e зап p , |
(14) |
|
T |
|
||||
|
|
p 1 |
|
|
|
|
об |
|
|
|
|
где Kоб – коэффициент передачи объекта, равный отношению величины изменения выходного сигнала к величине изменения входного сигнала:
K |
|
|
y |
. |
(15) |
об |
|
||||
|
|
|
|
||
41
7.2. Идентификация объекта управления с передаточной функцией, аппроксимированной последовательным соединением апериодического звена первого порядка и звена запаздывания
Предположив (аппроксимировав), что объект управления имеет вид последовательного соединения апериодического звена первого порядка и звена запаздывания, т.е. его передаточная функция имеет вид (14), в процессе идентификации необходимо найти все неизвестные в (14), а именно – постоянную времени объекта управления Тоб, время запаздывания τзап и коэффициент передачи объекта Kоб.
7.2.1. Метод 1 (метод касательной)
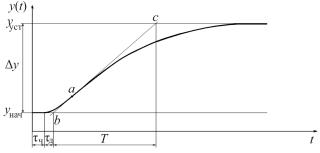
Пусть динамическая характеристика объекта управления y = f(t) имеет вид, представленный на рис. 14 (считаем, что вход объекта изменился в момент времени t = 0). Обозначим границы изменения выходной величины за унач (величина, на которой выход объекта y(t) находился в начальный момент времени) и ууст (установившееся значение выходной величины). Из этих точек унач и ууст параллельно временной оси t строятся линии, ограничивающие переходный процесс y.
Рис. 14. Идентификация ОУ методом касательной
Далее строится касательная к точке перегиба а (точка, в которой вторая производная функции y(t) меняет свой знак). Точку перегиба можно найти графически илианалитически, исходяизтого, что
42

d 2 y(t) 0 . dt2
Пересечение касательной с линиями унач и ууст, ограничивающими переходный процесс, дает величину постоянной времени объекта Тоб (величина, по оси времени между перпендикулярами из точек b и с).
Величина запаздывания складывается из величины чистого запаздывания τч и дополнительного τд:
τзап = τч + τд. |
(16) |
Величина коэффициента переда Kоб находится в соответствии с (15), где y = ууст – унач , а µ – величина, на которую изменилось управляющее воздействие, за счет которого произошло изменение выходной величины объекта управление, равное y.
7.2.2. Метод 2 (аналитический метод)
Пусть динамическая характеристика объекта управления y = f(t) имеет вид, представленный на рис. 15. Аналогично п. 7.2.1 определяется величина y = ууст – унач. Далее от этой величины находятся 33 и 70 %, проводятся из этих точек линии, параллельные временной оси, и из точек их пересечений с динамической характеристикой (точки а и b на рис. 15) опускаются перпендикуляры к временной оси. Таким образом, находят величины времени t1 и t2, необходимые для расчетов величины постоянной времени и време-
ни запаздывания в соответствии с выражениями |
|
|
Тоб 1,25(t2 t1 ), |
(17) |
|
зап 0,5(3t1 t2 ). |
||
|
Коэффициент передачи Kμ находится в соответствии с (15). Все найденные величины подставляются в передаточную функцию вида (14).
43

Рис. 15. Определение времени запаздывания
ипостоянной времени объекта
7.3.Идентификация объекта управления с передаточной функцией, аппроксимированной последовательным соединением статического звена второго порядка и звена запаздывания
Предположим (аппроксимируем), что передаточная функция объекта управления имеет вид последовательно соединенных статического звена второго порядка и звена запаздывания:
W ( p) |
|
Kоб |
|
|
e зап p |
|
|
|
Kоб |
|
e зап p . (18) |
|
(T p 1)(T p 1) |
T T p2 |
(T T ) p 1 |
||||||||||
|
1 |
2 |
|
|
|
|
1 |
2 |
|
1 |
2 |
|
С учетом |
замены |
а2 T1T2 , a1 T1 T2 |
передаточная функция |
|||||||||
звена второго порядка будет иметь вид |
|
|
|
|
|
|||||||
|
|
W ( p) |
|
|
Kоб |
|
|
e зап p . |
|
(19) |
||
|
|
a p2 |
a p 1 |
|
||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
Коэффициент передачи и время запаздывания определяются в соответствии с (15) и (16).
Далее строится нормированная переходная кривая yˆ(t) в соответствии с формулой
yˆ(t) y(t) yнач .
yкон yнач
44
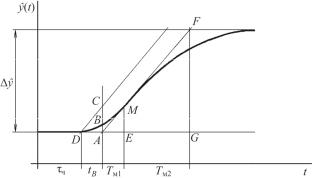
Для определения значений Т1 и Т2 к точке перегиба M на графике нормированной переходной характеристики yˆ(t) проводят
касательную АF (рис. 16). Затем визуально определяем время запаздывания τ, которое заканчивается в точке D. Параллельно касательной AF строится линия из точки D. Далее из точки А строится перпендикуляр к временной оси t.
Рис. 16. График переходной характеристики
Определяются величины:
h1 BA, tB DA,TM 1 AE, TM 2 FG.
Рассчитывается значение
h |
h |
2,73 |
0,53 |
. |
|
1 (150h ) 3 |
|||||
2 |
1 |
|
|
||
|
|
|
1 |
|
Параметры модели Т1 и Т2 можно легко определить: а) если h1 0,005 , то
Т2 tВ 1 10h1 1,73 30h1 2 2 ;
б) если h1 0,005 , то
45
|
|
|
|
|
|
|
|
|
|
|
0,0015 |
1 |
|
1 |
|
Т |
|
t |
|
Т |
|
1 200(0,032 |
h ) 1 |
0,086 |
|
|
|
, |
|||
2 |
В |
М1 |
|
|
|
||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
0,032 h1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
при этом Т1 и Т2 имеют связь:
Т1 ТМ1 Т2 .
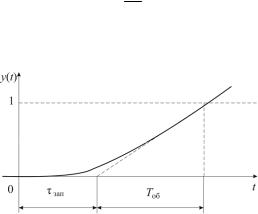
7.4. Идентификация нейтральных объектов управления
Наиболее распространенная модель нейтрального объекта имеет вид
W ( p) Tp1 e зап p .
Параметры передаточной функции объекта управления определяются, как показано на рис. 17.
Рис. 17. Динамическая характеристика нейтрального объекта
8. Типовые законы регулирования
Для управления технологическими объектами, как правило, используют типовые регуляторы, которые можно разделить на аналоговые и дискретные. К дискретным регуляторам относятся импульсные, релейные и цифровые, а аналоговые реализуют типовые законы регулирования, названия которых соответствуют названиям типовых звеньев.
46

Входным сигналом для аналоговых регуляторов является величина ошибки регулирования ε = u – у. Выходным сигналом является величина управляющего воздействия μ, подаваемая на объект управления. Преобразование входного сигнала в выходной производится согласно типовым законам регулирования.
Законом действия регулятора (законом регулирования или ал-
горитмом регулирования) называют функциональную взаимосвязь между ε = u – у погрешностью регулирования и изменением управляющего воздействия µ:
(t) f (t) .
8.1. Пропорционально-интегрально-дифференциальные (ПИД) регуляторы
ПИД-регулятор включает в себя три вида управляющих воздействий: пропорциональное, интегральное и дифференциальное. Данный тип регуляторов вырабатывает управляющее воздействие пропорционально отклонению регулируемой величины от заданного значения, интегралу по времени от ошибки регулирования и скорости изменения ошибки:
|
|
1 |
|
|
d (t) |
|
|
|
(t) K |
(t) |
(t)dt T |
|
. |
||||
T |
dt |
|||||||
|
p |
п |
|
|||||
|
|
и |
|
|
|
|
|
Структурная схема ПИД-регулятора может быть представлена в виде трех параллельно соединенных звеньев: статического звена нулевого порядка, идеального интегрирующего и идеального дифференцирующего (рис. 18).
Согласно (12) передаточная функция ПИД-регулятора будет иметь вид
W ( p) Kp T1p Td p,
a
где Kр – коэффициент передачи регулятора; Та – постоянная времени интегрирования; Td – постояннаявремени дифференцирования; или
47
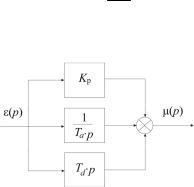
W ( p) Kp 1 Tи1p Tп p ,
где Ти – время изодрома; Тп – время предварения.
Рис. 18. Структурная схема ПИД-регулятора
Представленная на рис. 18 структурная схема ПИД-регулятора является базовой, и из нее легко получить другие классические законы регулирования. При Тп = 0 ПИД-регулятор превращается в ПИрегулятор. А если, кроме того, Ти → ∞, то получается П-регулятор.
8.2. Пропорциональные регуляторы
Пропорциональные регуляторы (П-регуляторы) вырабатывают управляющее воздействие пропорционально отклонению регулируемой величины от заданного значения
(t) Kp (t).
Численно коэффициент передачи регулятора равен перемещению регулирующего органа, которое осуществляет регулятор при отклонении регулируемой величины на единицу ее измерения. П-регулятор в динамическом отношении подобен безынерционному звену, передаточная функция, амплитудно-фазовая и временная характеристики которого определяются формулами
48

W ( p) Kp ,
W ( j ) Kp ,h(t) Kp .
П-регуляторы позволяют устойчиво регулировать работу практически всех промышленных регулируемых объектов. Однако они обладают тем недостатком, что при различных нагрузках регулируемого объекта регулируемая величина удерживается регулятором на различных значениях. Объясняется это тем, что перемещение регулируемого органа в новое положение, соответствующее новой нагрузке, может быть произведено только за счет отклонения регулируемой величины. Это явление получило название остаточной неравномерности регулирования, или статической ошибки.
8.3. Интегральные регуляторы
Интегральные регуляторы (И-регуляторы) вырабатывают управляющее воздействие пропорционально интегралу по времени от ошибки регулирования:
(t) 1 t (t)dt ,
Та 0
т.е. интегральные регуляторы производят перемещение регулирующего органа со скоростью, пропорциональной отклонению регулируемой величины от ее заданного значения:
d (t) 1 (t) . dt Та
В динамическом отношении И-регулятор подобен интегрирующему звену, его передаточная функция, амплитудо-фазовая и временная характеристики определяются формулами
49

|
|
|
|
|
1 |
|
|
|
|
|
W ( p) |
|
|
|
|
|
, |
|
|
|
|
|
Тa p |
|
|
|
||||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
1 |
|
|
j |
||
W ( j ) |
|
|
|
e |
|
2 , |
||||
Ta |
|
|||||||||
|
|
|
|
|
|
|
|
|||
|
|
1 |
|
|
|
|
|
|
||
h( p) |
|
|
t 1(t). |
|
||||||
Т |
|
|
|
|||||||
|
а |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||
8.4. Пропорционально-интегральные регуляторы
Пропорциональные регуляторы с введением в закон регулирования интеграла (ПИ-регуляторы) вырабатывает управляющее воздействие пропорционально отклонению регулируемой величины от заданного значения иинтегралу по времениотошибкирегулирования:
|
1 |
t |
|
1 |
t |
|
|
|
|
|
|
|
|||||
(t) Kp (t) |
(t)dt K p (t) |
(t)dt |
, |
|||||
T |
T |
|||||||
|
a 0 |
|
и 0 |
|
|
|||
т.е. скорость перемещения регулирующего органа пропорциональна отклонению и скорости изменения регулируемой величины:
d (t) |
K |
|
d (t) |
|
1 |
(t). |
dt |
p dt |
|
||||
|
|
Та |
||||
Передаточная функция ПИ-регулятора имеет вид
W( p) Kp 1 Tи1p .
Вдинамическом отношении ПИ-регулятор подобен системе из
двух параллельно включенных регуляторов: пропорционального с коэффициентом передачи Kp и интегрального с коэффициентом передачи Kр/Та. При беспредельном увеличении времени изодрома ПИ-регулятор превращается в П-регулятор. Если устремить Kp и Ти к нулю, но так, чтобы их отношение оставалось постоянным, то получим И-регулятор. ПИ-регуляторы, отличаясь простой конструк-
50