

Анализ и синтез одноконтурных систем автоматического регулирования т
..pdfнал того или иного элемента, пройдя через этот элемент, остается неизменным по величине (т.е. х = у). Если выходной сигнал элемента больше входного, то K > 1; если меньше, то K < 1; в случае их равенства K = 1.
Примером усилительного звена может служить рычаг Архимеда, соотношение сил которого характеризуется длинами плеч относительно опоры (F1 = KF2, так как F1l1 = F2l2, следовательно,
K = l1/l2).
5.2. Статическое звено первого порядка
Звено называется статическим звеном первого порядка (или апериодическим, инерционным, устойчивым), если его входная и выходная величины связаны между собой дифференциальным уравнением
a1 dydt(t) a0 y(t) b0 x(t),
или, обозначив K = b0/a0 и T = a1/a0, получим
T dydt(t) y(t) Kx(t),
где Т – постоянная времени (имеет размерность времени) апериодического звена первого порядка; K – коэффициент передачи апериодического звена.
Передаточная функция статического звена первого порядка имеет вид
W ( p) |
K |
|
|
, |
(6) |
||
Tp 1 |
|||||||
|
|
|
|
||||
или |
|
|
|
|
|
||
W ( p) K |
|
b0 |
|
, |
|||
a p |
a |
||||||
|
|
1 |
|
|
0 |
|
|
где a1 = Т, a0 = 1 и b0 = 1.
31

а |
б |
Рис. 8. Примеры динамических звеньев: а – апериодическое звено; б – статическое звено второго порядка
Апериодическое звено образуется при соединении физического элемента, обладающего емкостью по отношению к какому-либо веществу или энергии, с элементом, создающим сопротивление потоку этого вещества или энергии, направляющемуся в емкость (или из нее).
Примером такого звена может служить емкость, представленная на рис. 8, а. Резервуар с жидкостью является емкостью по отношению к жидкости, которая имеет входной расход Fвх. Сопротивлением, препятствующим накоплению жидкости в резервуаре, является выходной расход Fвых.
5.3. Статическое звено второго порядка
Звено называется статическим звеном второго порядка (или колебательным), если его входная и выходная величины связаны между собой дифференциальным уравнением вида
a |
|
d 2 y(t) |
a |
dy(t) |
a y(t) b x(t), |
|
|
dt2 |
dt |
||||
|
2 |
1 |
0 |
0 |
||
или, обозначив K = b0/a0 и T = a1/a0, получим: |
|
|||||
T |
2 d 2 y(t) |
T |
dy(t) |
a y(t) Kx(t), |
||
2 |
dt2 |
1 |
dt |
0 |
|
|
32 |
|
|
|
|
|
|
где Т2 – постоянная времени колебательного звена; T1 – постоянная времени демпфирования (затухания) колебательного звена; K – коэффициент передачи колебательного звена.
Передаточная функция статического звена первого порядка имеет вид
W ( p) |
|
|
K |
, |
(7) |
T 2 p2 |
T p 1 |
||||
2 |
1 |
|
|
||
или |
|
|
|
||
W ( p) K |
|
b0 |
|
, |
|
a p2 |
a p a |
||||
2 |
1 |
0 |
|
||
где a2 = Т2, a1 = Т1, a0 = 1 и b0 = 1.
Колебательное звено образуется при соединении двух элементов, обладающих емкостью по отношению к какому-либо веществу (или энергии) и способных взаимно обмениваться веществами (или энергией) через сопротивление. В процессе такого обмена возникают колебания выходной величины. Если в результате колебаний запас энергии уменьшается, то колебания затухают и звено является устойчивым, если запас энергии увеличивается, то колебания усиливаются и звено оказывается неустойчивым.
Примером такого звена может служить двуемкостный объект, представленный на рис. 8, б.
5.4.Звено запаздывания
Всистемах автоматического регулирования понятие динамических характеристик связано с понятием времени запаздывания. Пусть имеется некоторый элемент системы с входной величиной x(t) и выходной величиной y(t). Тогда время запаздывания будет выражаться в сохранении объекта по инерционности своего состояния y(t) в течение некоторого времени τ, при том, что входной сигнал объекта x(t) начал изменяться. Данный промежуток времени
называется временем чистого запаздывания τч и на рис. 9 обозначен как интервал времени между точками а (момент времени, когда из-
33

менился вход объекта x) и b (момент времени, когда начал изменяться выход объекта y).
Передаточная функция звена запаздывания имеет вид
W ( p) e p . (8)
Рис. 9. Временная характеристика динамического звена с запаздыванием
Примером звена запаздывания может служить конвейер, транспортирующий некоторое сыпучее вещество из точки а (начало конвейера) в точку b (конец конвейера). Время, которое сыпучее вещество будет перемещаться по конвейеру, можно считать временем запаздывания выходного сигнала (появление сыпучего вещества в точке b) по отношению к входному (появление сыпучего вещества в точке а), которое будет характеризоваться длиной и скоростью перемещения конвейера.
5.5. Интегрирующее звено
Интегрирующее звено характеризуется определенным соотношением между значением входной величины и скоростью изменения выходной величины. Такое звено называется также астатическим звеном первого порядка.
Дифференциальное уравнение звена имеет вид
34

|
dy(t) |
|
1 |
t |
|
Ta |
|
x(t) |
или y(t) |
|
x(t)dt, |
dt |
T |
||||
|
|
|
|
a 0 |
|
где Ta – постоянная времени интегрирования. Передаточная функция звена имеет вид
W ( p) |
1 |
. |
(9) |
|
|||
|
T p |
|
|
|
a |
|
|
5.6. Дифференцирующее звено
Различают идеальное и реальное дифференцирующие звенья. Идеальное дифференцирующее звено характеризуется уравне-
нием вида
y(t) Td xdt(t) ,
где Td – постоянная времени дифференцирования. Передаточная функция звена имеет вид
W ( p) Td p.
Выходная величина идеального дифференцирующего звена пропорциональна скорости изменения входной величины, и, следовательно, при изменении входной величины переходный процесс должен происходить мгновенно. Однако практически осуществить идеальное звено не представляется возможным. Поэтому применяются звенья, выполняющие дифференцирующее действие приближенно, т.е. реальные дифференцирующие звенья. Их уравнение может быть записано в виде
T dydt(t) y(t) Td xdt(t) ,
где Т – постоянная времени звена; Td – постоянная времени дифференцирования.
Передаточная функция дифференцирующего звена имеет вид
35

W ( p) ТрTd p1 . (10)
6.Соединение звеньев
Сцелью упрощения анализа функционирования системы управления все ее элементы или некоторые из них могут быть представлены в виде определенного соединения типовых звеньев.
Существует три основных вида соединения типовых звеньев.
6.1.Последовательное соединение звеньев
Последовательное соединение звеньев представлено на рис. 10, а. Поскольку сигнал на выходе такой системы y появится только в том случае, если входной сигнал х пройдет через все три элемента, данному соединению соответствует операция логического «И». Таким образом, формула для определения общей передаточной функции будет иметь вид
W W1 W2 W3... ,
или в общем случае
k |
|
W ( p) Wi ( p), |
(11) |
i 1
где k – число последовательно соединенных элементов.
а |
б |
в
Рис. 10. Соединения звеньев
36
6.2. Параллельное соединение звеньев
Параллельное соединение звеньев представлено на рис. 10, б. Поскольку сигнал на выходе такой системы y появится в случае прохождения входного сигнала х хотя бы через любой из трех элементов, т.е. данному соединению соответствует операция логического «ИЛИ», то формула для определения общей передаточной функции будет иметь вид
W W1 W2 W3 ... .
Следует отметить, что сигнал, поступающий на сумматор, может быть как положительным, так и отрицательным. Соответственно, в этом случае знак сигнала учитывается при сложении звеньев, т.е.
W W1 W2 W3 ... ,
или в общем виде
k |
|
W ( p) Wi ( p) , |
(12) |
i 1
где k – число параллельно соединенных элементов.
6.3. Соединение звеньев с обратной связью
Соединение звеньев с обратной связью представлено на рис. 10, в. При таком соединении звеньев формула для определения общей передаточной функции будет иметь вид
W ( p) |
W1 |
, |
|
|
|
1 W1 W2 |
|
|
|||
или в общем виде |
|
|
|
||
W ( p) |
|
Wпр |
|
, |
(13) |
1 Wпр Wобр |
|||||
где Wпр – передаточная функция элемента, включенного в прямой канал; Wобр – передаточная функция элемента, включенного в обратную связь.
37
Знак в знаменателе (13) зависит от вида обратной связи: при положительной обратной связи в знаменателе берется знак «–», при отрицательной – «+».
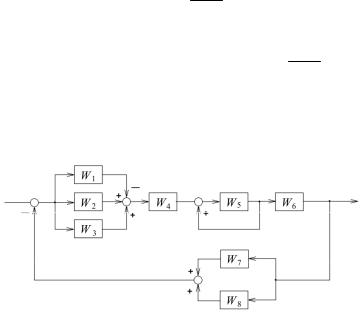
Пример 5. Структурная схема системы элементов W1–W8 представлена на рис. 10. Найти передаточную функцию данной системы.
Р е ш е н и е
На рис. 11 представлена система с обратной связью, в прямом канале которой находятся элементы W1 – W6, а в обратном – W7 и W8. Элементы W1, W2 и W3 соединены параллельно, причем W1 со знаком минус:
W1,2,3 ( p) W1 W2 W3.
Затем последовательно параллельному соединению W1, W2 и W3 соединены W4, W5 и W6, причем элемент W5 охвачен положительной обратной связью, т.е.
W5 '( p) W5
1 W5
и
Wпр ( p) W1,2,3 W4 W5 ' W6 W2 W3 W1 W4 1WW5 5 W6 .
В отрицательной обратной связи системы элементов W1–W8 включено параллельное соединение элементов W7 и W8, т.е.
Wобр ( p) W7 W8 .
Рис. 11. Соединения звеньев
38

Согласно (11)–(13) передаточная функция системы элементов W1–W8 будет иметь вид
|
|
W |
W |
W W |
|
W5 |
|
W |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||||
W ( p) |
|
2 |
3 |
|
1 |
4 1 W |
|
6 |
|
. |
||||||
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W5 |
|
|
|
|
|
|
|
|
|
1 W W W |
W |
|
|
W |
|
W |
W |
|
||||||||
|
|
|
||||||||||||||
|
|
2 |
3 |
1 |
4 1 W |
6 |
7 |
8 |
|
|
||||||
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
Следует отметить, что системы могут быть как замкнутыми (см. рис. 1), так и разомкнутыми (рис. 12). Это определяется наличием обратной связи.
Рис. 12. Схема разомкнутой САР
Разомкнутая система управления представляет собой последовательное соединение регулятора и объекта управления. В соответствии с (11) передаточная функция разомкнутой системы имеет вид
Wpc ( p) Wp W об.
Обозначим передаточную функцию разомкнутой системы
W ( p) |
B( p) |
|
b |
pm b |
pm 1 ... b p b |
, |
|
|
m |
m 1 |
1 |
0 |
|||
A( p) |
a pn a |
pn 1 ... a p a |
|
||||
pc |
|
0 |
|
||||
|
|
|
n |
n 1 |
1 |
|
|
где A(p) – характеристическое уравнение разомкнутой системы, тогда, принимая во внимание (13), передаточная функция замкнутой системы будет иметь вид
|
|
Wрc |
|
|
B( p) |
|
|
|
|
|
|
W |
( p) |
|
|
A( p) |
|
|
B( p) |
|
B( p) |
, |
|
|
|
|
|
A( p) B( p) |
D( p) |
||||||
зc |
1 Wрc |
1 B( p) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
A( p)
39

где D(p) = A(p) + B(p) – характеристическое уравнение замкнутой системы.
Полученная передаточная функция замкнутой системы описывает динамический канал «задание – регулируемая величина» и может быть обозначена Wuy.
Ниже представлены передаточные функции по другим динамическим каналам для замкнутой системы (см. рис. 1):
«задание – рассогласование» – Wuε ( p) 1 ; 1 Wоб Wр
|
«возмущение – регулируемая величина» – |
W y |
( p) |
|
Wоб |
. |
||||||||||||
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 Wоб Wр |
|
|
||
вид |
Пример 6. Передаточная функция разомкнутой системы имеет |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W ( p) |
|
9 p2 4 p |
. |
|
|
|
|
|
|
|
|
|||
|
|
|
|
5 p3 3 p2 |
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
pc |
|
|
|
|
|
|
|
|
|
|
||||
Получить передаточную функцию замкнутой системы. |
|
|
|
|||||||||||||||
|
Р е ш е н и е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W ( p) |
B( p) |
|
9 p2 |
4 p |
|
, |
|
|
|
|
|
|
||||
|
|
A( p) |
5 p3 3 p2 2 |
|
|
|
|
|
|
|||||||||
|
|
|
pc |
|
|
|
|
|
|
|
|
|
||||||
W |
( p) |
B( p) |
|
|
9 p2 4 p |
|
|
|
|
9 p2 |
4 p |
|
. |
|||||
|
5 p3 3 p2 2 9 p2 4 p |
|
|
|
|
|
||||||||||||
зc |
|
A( p) B( p) |
|
|
|
5 p3 12 p2 4 p 2 |
|
|||||||||||
|
|
|
|
|
|
|||||||||||||
7. Идентификация объекта управления
Под идентификацией объекта управления понимается определение параметров передаточной функции этого объекта управления по его динамической характеристике. Поскольку невозможно сказать, какой именно передаточной функцией будет описываться объект управления, ее вид необходимо задать.
40