

Методические указания к решению задач олимпиады по сопротивлению материалов (120
..pdfМосковский государственный технический университет имени Н.Э. Баумана
А.А. Горбатовский, А.И. Котов
МЕТОДИЧЕСКИЕ УКАЗАНИЯ К РЕШЕНИЮ ЗАДАЧ ОЛИМПИАДЫ
ПО СОПРОТИВЛЕНИЮ МАТЕРИАЛОВ
Под редакцией В.И. Цветкова
Москва Издательство МГТУ им. Н.Э. Баумана
2010
УДК 539.3/.8 ББК 30.121 Г67
Рецензент Г.Я. Пановко
Горбатовский А.А.
Г67 Методические указания к решению задач олимпиады по сопротивлению материалов / А.А. Горбатовский, А.И. Котов ; под ред. В.И. Цветкова. — М.: Изд-во МГТУ им. Н.Э. Баума-
на, 2010. — 27, [1] с. : ил.
В методических указаниях рассмотрены решения задач, предложенных участникам отборочного тура Всероссийской олимпиады по сопротивлению материалов, прошедшей в МГТУ им. Н.Э. Баумана в марте 2009 г.
Для студентов машиностроительных специальностей высших учебных заведений.
УДК 539.3/.8 ББК 30.121
♥ МГТУ им. Н.Э. Баумана, 2010
2
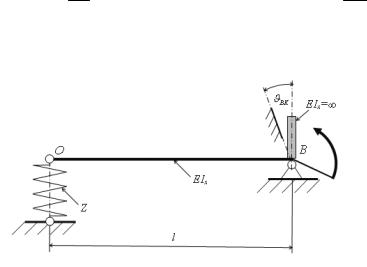
Задача 1. Угол поворота сечения B балки OB (рис. 1) ограничен
величиной ϑBK = Ml . Коэффициентжесткости пружины Z = EIx .
EIx l3
Определить потенциальную энергию U деформации системы. Дано: l, Ix , E, M .
Рис. 1
Решение. Вычислим угол поворота сечения B при отсутствии
ограничителя. При сжатии пружины силой |
M |
|
(которую можно |
|||||||||||
l |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
найти из уравнения равновесия балки ∑ M B = 0) |
осадка пружины |
|||||||||||||
составит OO = |
M |
. Таким образом, угол поворота ϑ |
BZ |
сечения B, |
||||||||||
|
||||||||||||||
1 |
lZ |
|
|
|
|
|
|
|
|
|||||
соответствующий деформации пружины, будет равен |
|
|
||||||||||||
|
|
ϑBZ = |
OO1 |
= |
M |
= |
Ml |
. |
|
|
|
|||
|
|
|
l2 Z |
|
|
|
|
|||||||
|
|
|
l |
|
EIx |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|

Рис. 2
Полный угол поворота сечения B в этом случае
ϑ=ϑBZ +ϑBF ,
где ϑBF — угол поворота вследствие изгибной деформации балки (рис. 2). Значение угла ϑBF определяется перемножением эпюр по Мору — Верещагину (рис. 3):
|
1 1 |
|
|
2 |
|
|
|
1 Ml |
|
|
|
|
||||||||
ϑBF = |
|
|
|
|
lM |
|
|
= |
|
|
|
|
|
. |
|
|
||||
|
|
|
3 |
3 EIx |
||||||||||||||||
|
EIx 2 |
|
|
|
|
|
|
|
|
|
||||||||||
Следовательно, |
|
|
|
|
Ml |
|
|
1 |
|
Ml |
|
4 |
|
Ml |
|
|||||
ϑB = ϑBZ +ϑBF = |
|
+ |
|
|
= |
|
, |
|||||||||||||
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
EIx |
|
3 EIx |
3 EIx |
|||||||||||||
что превышает допустимое значение угла ϑBK . |
||||||||||||||||||||
Приходим к выводу, |
что в процессе нагружения балки изги- |
|||||||||||||||||||
бающим моментом сечение B повернется лишь на угол ϑBK = Ml ,
EIx
который соответствует части M внешнего момента М, найденной из соотношения
ϑB = ϑBZ +ϑBF = |
4 |
|
M l |
= |
Ml |
→ M = |
3 |
M. |
|
|
|
|
4 |
||||
|
3 EIx |
EIx |
|
|||||
4

Рис. 3
Дальнейшее увеличение внешнего момента будет восприниматься абсолютно жесткими упорами в сечении B.
Потенциальная энергия U деформации системы может быть определена как сумма энергии UZ, накопленной в пружине, и энергии UF изгибной деформации балки:
U= UBZ + UBF = 12 Z (OO1)2
M = M
1 EI 3 Ml
=2 l3x 4 EIx
l |
M 2 |
|
(z)dz |
|
|
|
|
|
|
||||||||||
+ |
∫ |
|
xP |
|
|
|
|
|
|
= |
|
|
|
|
|||||
|
2EI |
|
|
|
|
|
|||||||||||||
|
|
|
x |
|
|
|
|
|
|
|
|
||||||||
0 |
|
|
|
|
|
|
|
|
M =M |
|
|
|
|
|
|
||||
|
|
|
|
|
3 Mz 2 |
|
|
|
|
|
|
||||||||
|
2 |
|
l |
|
|
|
|
|
|
dz |
3 M |
2 |
l |
|
|||||
|
4 l |
|
|||||||||||||||||
|
+ ∫ |
|
|
|
= |
|
|
||||||||||||
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||
|
|
|
|
|
2EIx |
|
8 EIx |
||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|||||||||
Задача 2. При работе неправильно спроектированного храпового механизма (рис. 4) в верхних и нижних волокнах пружины в заделке возникают пластические деформации.
Как нужно изменить размеры H и (или) B, чтобы коэффициент запаса по началу текучести пружины увеличился в 2 раза?
5

Copyright ОАО «ЦКБ «БИБКОМ» & ООО «Aгентство Kнига-Cервис»
Рис. 4
Рис. 5
Дано: l, H, B, f , E.
Решение. Расчетная схема (рис. 5) пружины храпового механизма представляет собой консольную балку под действием сосредоточенной силы F, обеспечивающей стрелу f прогиба сечения
K, равную f = Fl3 . Сила F определяется через прогиб: 3EIx
F = |
3EIx |
f . |
|
l3 |
|||
|
|
Наибольший |
|
внутренний |
|
изгибающий |
момент |
|||||||
(M x ) |
|
= Fl = |
3EIx |
f |
возникает в заделке, тогда наибольшее нор- |
|||||||
max |
l2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||
мальное напряжение можно выразить как |
|
|||||||||||
|
|
|
|
σ |
max |
= |
(M x )max |
= |
Fl |
|
||
|
|
|
|
|
|
W |
|
HB2 / 6 |
|
|
||
|
|
|
|
|
|
|
x |
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|

или, принимая во внимание, что Ix = HB123 , как
3EfB
σmax = 2l2 .
Таким образом, ширина пружины не влияет на максимальное напряжение, а следовательно, уменьшить напряжение в 2 раза (увеличив тем самым коэффициент запаса в 2 раза) можно путем уменьшения в 2 раза толщины пружины (высоты поперечного сечения).
Задача 3. К предварительно ненапряженному валу OC (рис. 6) прикладывают момент M, обеспечивающий угол поворота ϕC се-
чения C. Затем вал в этом сечении (не снимая нагрузки) приваривают к абсолютно жесткой опоре, после чего на участке BC вы-
сверливают отверстие диаметром d0 = d2 .
После окончания всех работ значение относительной линейной деформации, измеренное с помощью тензорезистора, составило ε.
Определить значение момента M.
Дано: l, d, ϕC , ε, G, ν.
Рис. 6
Решение. Для поворота сечения C сплошного вала на угол ϕC
следует приложить момент M = GI2lp ϕC .
7

Для закрепленного и высверленного вала внутренние крутящие моменты MкD , одинаковые во всех сечениях вала, можно найти из равенства
|
|
|
M Dl |
+ |
M Dl |
= ϕC = |
M |
|
2l |
, |
||||
|
|
|
|
к |
|
к |
|
к |
|
|||||
|
|
|
GI p |
|
GI pD |
|
|
|
GI p |
|
||||
где I p = |
πd 4 |
; |
D |
πd 4 |
|
|
|
1 4 |
= |
15 |
I p ; |
Mк = M — внутрен- |
||
32 |
I p = |
32 |
1 |
− |
|
|
16 |
|||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ний крутящий момент в сечениях сплошного вала; MкD = 3031 M.
Рис. 7
Напряженное состояние точек вала — чистый сдвиг (рис. 7):
|
M D |
M D |
|
16 |
30 M |
|
||||
τmax = |
K |
= |
K |
= |
|
|
|
|
|
. |
|
πd3 /16 |
|
31 πd3 |
|||||||
|
Wp |
|
|
|
||||||
Согласно обобщенному закону Гука,
ε = σE1 −νσE3 = τmaxE (1+ν)
или
ε =16 30 (1+ν3 ) M.
31π Ed
Таким образом, искомый момент равен
8

M = |
|
31π Ed3 |
ε = 0, 203 |
Ed3 |
ε = 0, 406Gd |
3 |
ε. |
||||
|
|
|
|
|
|
|
|
||||
16 |
30 (1+ν) |
(1 |
+ν) |
|
|||||||
|
|
|
|
|
|||||||
Задача 4. Прерыватель электромеханического реле (рис. 8) собран таким образом, что между контактами A и B (за счет предварительного натяга 0) существует сила взаимодействия N0.
Какую силу F следует приложить, чтобы обеспечить надежное размыкание контактов, соответствующее зазору между A и B, равному 0,5 0?
Дано: l, d, ϕC , εu , G, ν.
Рис. 8
Решение. Натяг 0 равен сумме поджатий элементов 1 и 2 (см. рис. 8), при этом в процессе сборки вследствие равных жесткостей и контактной силы (рис. 9) каждый из контактов получает одно и
|
|
|
N |
l3 |
|
|
|
|
|
|
||
то же перемещение 1 = 2 |
= |
|
|
0 |
|
|
, следовательно, |
|||||
|
3EIx |
|||||||||||
|
|
|
|
|
|
|
|
|
||||
0 = |
1 + |
|
|
|
= |
2 N0l3 |
||||||
|
2 |
|
|
|
|
, |
||||||
|
3 |
|
||||||||||
откуда |
|
|
|
|
|
|
|
|
EIx |
|||
|
|
|
3 EIx |
|
|
|
|
|
||||
N0 |
= |
|
|
0 . |
|
|||||||
2 |
|
l3 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
До размыкания контактов A и B балочные элементы 1 и 2 работают совместно до тех пор, пока контактная сила (N0 – X1) (рис. 10) не станет равной нулю. Здесь X1 — сила, при которой происходит размыкание контактов A и B.
9

Рис. 9
Рис. 10
Рассмотрев отдельно силу X1(F) (рис. 11), с использованием
метода сил X1 11 + |
1P = 0 найдем: |
|
|
|
|
|
|
|||||||||||||||
|
= |
2 |
|
1 |
ll |
2 |
l = |
2l3 |
; |
|
||||||||||||
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
3EIx |
|||||||||||||||
|
|
EIx 2 |
|
|
3 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
1 |
1 |
|
|
5 |
|
|
|
|
5Fl3 |
||||||||
1P = − |
|
|
|
|
|
|
|
|
ll |
|
Fl |
= − |
|
|
; |
|||||||
|
|
|
|
|
2 |
3 |
|
|||||||||||||||
|
|
|
|
EIx |
|
|
|
|
|
|
6EIx |
|||||||||||
X1 = − |
|
1P |
= |
|
5 |
F. |
|
|
|
|
|
|
|
|||||||||
|
11 |
4 |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|