

Астахов Физика. Конспект лекций и задач для 8 класса 2011
.pdf§3. Законы Ньютона
Классическая динамика основана на трех законах Ньютона, являющихся обобщением большого количества опытных (экспериментальных) данных.
Инертность — свойство тела, состоящее в том, что для изменения скорости тела при воздействии на него другого тела (или нескольких тел) требуется некоторый промежуток времени.
Гравитационное взаимодействие тел — взаимное притяжение тел, силы которого пропорциональны массам этих тел.
Масса тела m — СФВ, являющаяся мерой инертности тела и гравитационного взаимодействия тел.
Свойства массы: является положительной величиной (m > 0); не зависит от скорости тела (m = const); масса системы тел равна
n
сумме масс всех тел, входящих в эту систему ( mс = ∑mi , где n
i=1
— число тел системы); масса замкнутой системы тел (§4) остаётся неизменной при всех процессах, происходящих в этой системе
(mз.с = const).
Единица массы — килограмм: [m] = кг. Средняя плотность тела
ρ = |
m |
, |
(3.1) |
|
V |
||||
|
|
|
где m — масса всего тела, V — объем тела. Однородное тело — тело, любые (равные)
имеют одинаковые физические свойства.
Плотность однородного тела
ρод = mi ,
Vi
части которого
(3.2)
где mi — масса любой части однородного тела, объем которой Vi. Единица плотности тела — килограмм на кубический метр:
[ρ] = кг/м3 .
11
Средняя плотность неоднородного тела может быть определена через отношение суммы масс всех однородных частей тела mi к сумме их объемов Vi (i = 1,...,n):
|
n |
|
|
|
∑mi |
|
|
ρ = |
i=1 |
. |
(3.3) |
|
|||
|
n |
|
|
|
∑Vi |
|
|
i=1
Механическое действие тел — действие, вызывающее (по от-
дельности или совместно) деформации (изменение размеров и формы тела) и ускорения взаимодействующих тел.
Механическое взаимодействие происходит как между телами находящимися в контакте, так и между телами, находящимися на некотором расстоянии друг от друга. В последнем случае, взаимодействие осуществляется посредством силового поля (области пространства, в которой на тело действует сила).
Сила F — ВФВ, являющаяся мерой механического воздействия на данное тело со стороны другого тела.
Законы Ньютона
Первый закон Ньютона
Существуют системы отсчёта, называемые инерциальными системами отсчёта (ИСО), относительно которых материальная точка движется прямолинейно и равномерно или покоится, если на нее не действуют другие материальные точки.
Второй закон Ньютона
Ускорение материальной точки относительно инерциальной системы отсчёта прямо пропорционально приложенной к ней силе F и обратно пропорционально массе m материальной точки:
a = |
F |
. |
(3.4) |
|
|||
|
m |
|
|
Единица силы — ньютон: [F] = Н = кг м/с2.
Принцип независимости действия (суперпозиции) сил
Ускорение материальной точки относительно инерциальной
12
системы отсчёта при одновременном приложении к ней нескольких сил прямо пропорционально сумме всех приложенных сил и обратно пропорционально массе m этой материальной точки:
n
a = ∑i=1 Fi = Fр , (3.5) m m
где Fi — сила, с которой i-я м.т. действует на данную м.т. по отдельности, n — число сил, приложенных к данной материальной точке, Fр — равнодействующая сила, равная сумме всех сил Fi (i =1...n), одновременно приложенных к материальной точке:
n |
|
Fр = ∑Fi . |
(3.6) |
i=1
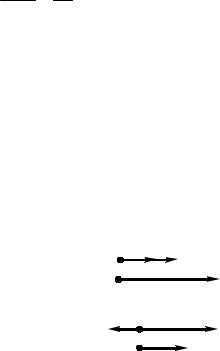
Например, равнодействующая Fр двух сил F1 и F2 (рис. 3.1,а), приложенных к материальной точке и направленных по одной прямой в одну сторону, направлена в ту же сторону, а ее модуль равен сумме модулей этих сил:
Fр = F1 + F2 . |
(3.7) |
|
а) |
Равнодействующая Fр двух сил F1 и F2 (рис. 3.1,б), приложенных к материальной точке и направленных по одной
прямой в противоположные стороны на- б) правлена в сторону большей силы (например, F2), а ее модуль равен модулю разности модулей этих сил:
Fр = F2 − F1 . |
(3.8) |
F1 F2
m
Fр
F1 F2 m
Fр
Рис. 3.1
Динамическое уравнение движения материальной точки:
n |
|
ma = ∑Fi . |
(3.9) |
i=1
Векторному уравнению (3.9) эквивалентно уравнение для про-
13

екций ускорения и сил, расположенных на оси Ох:
n |
|
max = ∑Fi x . |
(3.10) |
i=1
Третий закон Ньютона
Силы, с которыми действуют друг на друга две взаимодейст-
F12 1 2 |
F21 |
вующие материальные точки, равны по |
||
величине и противоположны по направ- |
||||
F12 |
F21 |
|||
лению: |
|
|||
1 2 |
|
F12 = − F21, |
(3.11) |
|
Рис. 3.2 |
|
где F12 — сила, с которой 2-я м.т. дейст- |
||
|
|
вует на 1-ю м.т., F21 — сила, с которой |
||
1-я м.т. действует на 2-ю м.т. (см. рис.3.2). |
|
|||
Сила тяжести и вес тела |
|
|||
Сила тяжести |
|
|
||
|
|
Fтяж = mg, |
(3.12) |
|
где m — масса тела, g — ускорение свободного падения (относительно поверхности Земли).
Вес тела Fв — сила, с которой тело действует на опору или подвес, удерживающие его от свободного падения.
Согласно третьему закону Ньютона вес тела равен по модулю силе, с которой опора (или подвес) действует на это тело.
Если опора неподвижна (или движется равномерно и прямолинейно) относительно поверхности Земли, то модуль веса тела равен модулю силы тяжести:
Fв = mg. |
(3.13) |
Силы упругости
Силы упругости возникают при упругой (обратимой) деформации тел.
Закон Гука: сила упругости прямо пропорциональна упругой деформации тела.
Сила упругости винтовой пружины. Винтовая пружина дли-
ной L0 закреплена одним концом на опоре (рис. 3.3). Пружина рас-
14

тянута (может быть сжата) внешней силой Fвнеш, действующей по оси пружины. Пружина действует на внешнее тело с силой Fупр.
В положении равновесия пружины модули силы упругости и внешней силы одинаковы:
Fупр = Fвнеш. |
(3.14) |
Fупр |
Fвнеш |
|
|||
Модуль силы упругости |
L0 |
L0 |
|
|
|
||
Fупр = k|ΔL0|, |
(3.15) |
L |
|
где L0 = (L − L0) — удлинение при растяжении (укорочение при сжа-
тии) пружины, L0 — длина ненагруженной пружины; L — длина нагруженной пружины; k — жесткость пружины.
Жесткость пружины может быть определена из равенства:
k = |
|
Fвнеш |
|
. |
(3.16) |
|
L0 |
|
|||
|
|
||||
|
|
|
|
|
Единица жесткости пружины — ньютон на метр: [k] = Н/м.
Жесткость системы пружин
На рис. 3.4,а показаны две параллельно соединенные пружины, на рис. 3.4,б — две последовательно соединенные пружины с разными жесткостями k1 и k2.
а) |
б) |
Рис. |
3.4 |
Жесткость системы kпр, состоящая из n параллельно соеди-
ненных пружин с жесткостями кi (i = 1,...,n):
n |
|
kпр = ∑ki . |
(3.17) |
i=1
15

Жесткость системы kпс, состоящая из n последовательно соединенных пружин с жесткостями кi (i = 1,...,n), находится из равенства:
1 |
n |
1 |
|
|
|
= ∑ |
. |
(3.18) |
|||
kпс |
|
||||
i=1 |
ki |
|
|||
Силы трения
Трение — взаимодействие между соприкасающимися телами, препятствующее их движению относительно друг друга.
Сухое трение — трение между поверхностями твёрдых тел. Сухое трение подразделяется на трение покоя, препятствую-
щее возникновению движения, и трение скольжения, препятствующее относительному движению тел.
Сила трения покоя Fтр.п равна по модулю и направлена противоположно силе F, параллельной поверхности опоры (рис.3.5,а):
Fтр.п = − F. |
(3.19) |
Модуль максимальной силы трения покоя |
|
Fтр.п.м = μN, |
(3.20) |
где μ — коэффициент трения (зависит от материала и состояния соприкасающихся поверхностей тел), N — модуль нормальной силы реакции опоры (на рис. 3.5,а брусок рассматривается как материальная точка и поэтому все силы изображены приложенными к точке, расположенной в центре бруска).
|
N |
|
N |
Fтр.п |
F |
Fтр.ск |
v |
|
mg |
|
mg |
|
а) |
Рис. 3.5 |
б) |
|
|
|
Сила трения скольжения Fтр.ск. направлена противоположно скорости тела v относительно опоры (см. рис. 3.5,б).
Модуль силы трения скольжения равен модулю максимальной
16

силе трения покоя:
Fтр.ск = μN. |
(3.21) |
Cилы трения покоя и скольжения не зависят от площади соприкасающихся поверхностей.
§4. Работа. Мощность. Энергия
Работа (механическая) А постоянной силы F, приложенной к материальной точке, при ее прямолинейном движении:
а) если направления силы F и перемещения r совпадают
(рис. 4.1,а), то
|
A = F|Δr|, |
|
(4.1) |
б) если направления силы F и перемещения |
r противополож- |
||
ны (рис. 4.1,б), то |
A = −F|Δr|, |
|
(4.2) |
|
|
||
в) если сила F перпендикулярна перемещению |
r (рис. 4.1,в), |
||
то |
А = 0. |
|
(4.3) |
|
|
||
m F |
F m |
F |
|
|
|
||
r |
r |
m |
r |
а) |
б) |
|
в) |
Рис. 4.1
Если прямолинейное движение материальной точки происходит по оси Ох, то работа постоянной силы, приложенной к материальной точке, может быть найдена также из равенства:
A = Fх |
х, |
(4.4) |
где Fх — проекция силы на ось Ох, |
х — проекция перемещения на |
|
ось Ох. |
|
|
Работа может быть положительной величиной ( A > 0), равна нулю (А = 0) или отрицательной величиной (А < 0).
17

Единица работы — джоуль: [A] = Дж = Н м.
Работа силы тяжести (при вертикальном движении материальной точки относительно поверхности Земли):
A = mg(hн − hк) = −mg h, |
(4.5) |
где hн и hк — начальная и конечная высоты материальной точки.
Работа упругой силы винтовой пружины
Аупр = |
k( |
L |
0н |
)2 |
− |
k( L |
0к |
)2 |
, |
(4.6) |
|
2 |
|
|
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
где ( L0н) — начальное удлинение при растяжении (укорочение при сжатии) пружины, ( L0к) — конечное удлинение (укорочение) пружины, k — жесткость пружины.
Средняя мощность
P = |
A |
, |
(4.7) |
|||
t |
||||||
|
|
|
|
|||
где A — работа, совершенная за промежуток времени t. |
|
|||||
Мощность |
|
|
||||
P = |
Ai |
|
, |
(4.8) |
||
|
||||||
|
|
ti |
|
|
||
где Аi — работа за соответствующий промежуток времени |
ti (из |
|||||
общего времени работы t), при условии, что за любые равные промежутки времени ti соответствующие работы Аi одинаковы.
Единица мощности — ватт: [P] = Вт = Дж/с.
При равномерном прямолинейном движении материальной точки по оси Ох мощность может быть найдена также из равенства:
A = Fхvх, |
(4.9) |
где Fх — проекция силы, приложенной к материальной точке, на ось Ох, vх — проекция скорости материальной точки на ось Ох.
Система тел — тела, объединенные в группу при решении данной задачи.
Внутренние тела — тела, принадлежащие данной системе.
18
Внешние тела — тела, не принадлежащие данной системе. Замкнутая система тел — система, ни одно из тел которой не
взаимодействует с внешним телом (внешними телами). Незамкнутая система тел — система, хотя бы одно из тел
которой взаимодействует с внешним телом (внешними телами). Рассмотрим систему тел, между которыми действуют только
силы упругости, силы тяжести и силы трения (силы сопротивления среды).
Потенциальная энергия П — СФВ, определяемая взаимным расположением взаимодействующих тел системы (частей тела).
Теорема о потенциальной энергии — убыль потенциальной энергии системы материальных точек (частей тела) равна работе сил тяжести и (или) упругости:
− П = Атж + Аупр. |
(4.10) |
Поле сил (силовое поле) — область пространства, в каждой точке которой на тело действуют силы.
Однородное поле сил — поле, силы которого во всех его точках одинаковы.
Потенциальная энергия материальной точки (м.т.) в какой-
либо точке поля сил тяжести может быть определена через работу сил этого поля при перемещении м.т. из данной точки поля в точку, потенциальная энергия в которой принята равной нулю.
Потенциальная энергия материальной точки вблизи поверх-
ности Земли:
Птяж = mgh + С, |
(4.11) |
где h — высота материальной точки, С — произвольная постоянная, значение которой выбирается из удобства решения задачи.
Потенциальная энергия упруго деформированной пружины
Пупр = |
k( |
L |
)2 |
+ C , |
|
|
0 |
|
(4.12) |
||
|
2 |
|
|||
|
|
|
|
|
где ( L0) — удлинение (укорочение) пружины, k — жесткость пружины, С — произвольная постоянная, значение которой выбирается из удобства решения задачи.
19
Кинетическая энергия тела K — СФВ, обусловленная движе-
нием тела.
Кинетическая энергия материальной точки
K = |
mv2 |
, |
(4.13) |
|
2 |
||||
|
|
|
где m — масса, v — модуль скорости материальной точки.
Теорема о кинетической энергии материальной точки — при-
ращение кинетической энергии материальной точки равно работе равнодействующей силы:
К = Ар. |
(4.14) |
Уравнению (4.14) эквивалентно уравнение: |
|
n |
|
K = ∑Ai |
(4.15) |
i=1
где Аi — работа i-ой силы, n — число сил, приложенных к данной материальной точке.
Кинетическая энергия системы материальных точек равна сумме кинетических энергий всех материальных точек, принадлежащих данной системе:
n |
|
Kс = ∑Ki . |
(4.16) |
i=1
где Кi — кинетическая энергия i-ой м.т, n — число материальных точек системы.
Механическая энергия материальной точки
E = K + П, |
(4.17) |
где K — кинетическая, П — потенциальная энергия материальной точки.
Механическая энергия системы материальных точек
Eс = Kс + Пс, |
(4.18) |
где Kс — кинетическая, Пс — потенциальная энергия материальных точек системы.
20