

Учебное пособие 2200
.pdfИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ В СТРОИТЕЛЬНЫХ, СОЦИАЛЬНЫХ И ЭКОНОМИЧЕСКИХ СИСТЕМАХ
Расчетные соотношения (1) – (4) для таких |
развиваемое насосом, Па; – КПД привода |
|||||||||||||||||||||||||||||||||||
аномально вязких сред требуют уточнения с |
насоса; cэл – тариф (стоимость) 1 кВт ч элек- |
|||||||||||||||||||||||||||||||||||
учетом неньютоновского характера их тече- |
троэнергии, руб./кВт ч; сут – продолжитель- |
|||||||||||||||||||||||||||||||||||
ния. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
ность работы трубопроводной |
установки в |
|||||||||||||||||||||||||||
Для описания реологического поведе- |
||||||||||||||||||||||||||||||||||||
течение суток, ч. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
ния неньютоновских жидкообразных сред |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
С учетом (7) и (8) критерий оптимиза- |
|||||||||||||||||||||||||||||||||||
широко используется |
степенной |
закон |
|
|||||||||||||||||||||||||||||||||
ции (6) примет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
(уравнение Оствальда-де Виля), связываю- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
щий напряжение сдвига , Па, и скорость |
F aDL 365Kз |
|
|
Q P |
|
cэл сут . |
|
|
(9) |
|||||||||||||||||||||||||||
сдвига , с-1, [11, 12] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
1000 |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
K n , |
|
|
|
(5) |
|
Таким образом, задача технико- |
||||||||||||||||||||||||||||||
где K – консистентная переменная; |
n – ин- |
экономической |
оптимизации |
трубопровода |
||||||||||||||||||||||||||||||||
может быть сформулирована как задача оп- |
||||||||||||||||||||||||||||||||||||
декс течения. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
тимизации функции двух переменных сле- |
||||||||||||||||||||||||||||
В этой связи актуальной является зада- |
||||||||||||||||||||||||||||||||||||
дующим образом. Требуется определить та- |
||||||||||||||||||||||||||||||||||||
ча определения |
|
оптимального диаметра и |
||||||||||||||||||||||||||||||||||
|
кие значения диаметра трубопровода D и |
|||||||||||||||||||||||||||||||||||
давления в трубопроводе, обеспечивающих |
||||||||||||||||||||||||||||||||||||
давления, |
|
развиваемого насосом |
|
P , |
при |
|||||||||||||||||||||||||||||||
одновременно снижение |
стоимости |
трубо- |
которых |
критерий |
|
оптимизации |
|
вида |
(9) |
|||||||||||||||||||||||||||
провода и затрат электроэнергии для приво- |
|
|
||||||||||||||||||||||||||||||||||
принимает минимальное значение: |
|
|
||||||||||||||||||||||||||||||||||
да насоса с учетом аномалии вязкости транс- |
|
|
||||||||||||||||||||||||||||||||||
F SP P SD D min , |
|
|
|
|||||||||||||||||||||||||||||||||
портируемой среды. |
|
|
|
|
|
|
(10) |
|||||||||||||||||||||||||||||
В качестве критерия технико - эконо- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P,D |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
мической оптимизации используем суммар- |
где Sp – удельные годовые эксплуатационные |
|||||||||||||||||||||||||||||||||||
ные годовые затраты F, руб./год, на создание |
затраты, руб./(год Па); SD – удельные годо- |
|||||||||||||||||||||||||||||||||||
и эксплуатацию технологического трубопро- |
вые капитальные затраты, руб./(год м): |
|
||||||||||||||||||||||||||||||||||
вода, являющиеся линейной суперпозицией |
|
|
|
|
|
|
365KзQcэл сут |
|
|
|
|
|
|
|
||||||||||||||||||||||
капитальных K, |
|
руб./год, |
и эксплуатацион- |
|
|
SP |
|
|
|
; |
|
|
|
(11) |
||||||||||||||||||||||
ных Э, руб./год, затрат [9, 10] |
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
F K Э . |
|
|
|
(6) |
|
|
|
|
|
|
SD aL . |
|
|
|
|
|
|
|
|
|
(12) |
|||||||||||||||
Капитальные затраты K на создание |
|
Для |
|
горизонтально |
|
|
|
|
|
расположенного |
||||||||||||||||||||||||||
трубопровода, отнесенные к одному году его |
трубопровода круглого сечения в ламинар- |
|||||||||||||||||||||||||||||||||||
эксплуатации, в первом приближении про- |
ном, установившемся и изотермическом ре- |
|||||||||||||||||||||||||||||||||||
порциональны его габаритным размерам и |
жиме течения объемный расход жидкости, |
|||||||||||||||||||||||||||||||||||
прейскурантной цене трубопровода |
|
подчиняющейся реологическому закону (5), |
||||||||||||||||||||||||||||||||||
K aDL , |
|
|
|
(7) |
определяется соотношением [12] |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n R3 R P |
|
|
|
|
|
|
|
|
||||||||||||||
где L – длина трубопровода, м; D – диметр |
|
|
|
Q |
n |
|
, |
|
|
|
(13) |
|||||||||||||||||||||||||
трубопровода, м; |
|
a – прейскурантная стои- |
|
|
|
3n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
мость 1 погонного метра трубопровода диа- |
|
|
|
|
|
1 |
|
2LK |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
где R – радиус трубопровода, м. |
|
|
|
|||||||||||||||||||||||||||||||||
метром 1 м, руб./(год м2). |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
Учитывая, |
что |
R D 2 , представим |
|||||||||||||||||||||||||||||
Эксплуатационные затраты Э, руб./год, |
|
|||||||||||||||||||||||||||||||||||
(13) в виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
на эксплуатацию трубопровода в течение ка- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
8Q 3n 1 |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
лендарного года представляют собой стои- |
|
|
|
|
|
|
|
|
|
|
3n 1 |
|
|
|
||||||||||||||||||||||
мость затраченной электроэнергии, |
потреб- |
P |
|
|
|
|
|
|
|
|
|
4LKD |
. |
|
(14) |
|||||||||||||||||||||
ленной насосом за время его работы в тече- |
|
|
n |
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
ние года |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
С учетом (14) критерий оптимизации |
|||||||||||||||||||||||||||
Э 365K |
|
|
Q P |
c |
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
, |
(8) |
(10) примет вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
з 1000 эл |
сут |
|
|
8Q 3n 1 n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
где Kз – коэффициент запаса мощности элек- |
|
|
|
|
3n 1 |
|
|
|
|
(15) |
||||||||||||||||||||||||||
F |
|
|
|
|
|
|
|
4LKD |
SP |
SD D . |
||||||||||||||||||||||||||
тродвигателя; Q – объемный расход транс- |
|
n |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
портируемой среды, м3/с; |
P – давление, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
20
ВЫПУСК № 2 (20), 2020 |
ISSN 2618-7167 |
Необходимое условие минимизации критерия (15) имеет вид
dF |
8Q |
|
3n 1 |
n |
|
|
3n 1 2LK |
|
|
|
4LKD 3n 2 SP SD |
||
dD |
|
n |
||||
|
|
|
||||
|
|
|
|
|||
dDdF 0 , т.е.
0 . |
(16) |
Решая (16) относительно D, получим оптимальное значение диаметра трубопровода
|
|
|
|
|
|
1 |
|
|
||
|
|
8Q 3n 1 n |
S |
P |
|
3n 2 |
|
|
||
D* 3n 1 |
|
|
4LK |
|
|
. |
(17) |
|||
n |
|
|
||||||||
|
|
|
|
SD |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Подставляя (17) в (14), получим оптимальное значение давления, развиваемого насосом
P* Q 3n 1n
n
3n 2
|
1 |
3n 1 |
|
|
|
|
3n 1 |
|
|
|||
|
S |
|
|
3n 2 |
|
(18) |
||||||
2LK 3n 2 |
|
|
|
|
P |
|
|
|
. |
|||
|
|
|
|
|
|
|
||||||
|
|
|
2 |
|
|
SD |
|
|
|
|
||
Нетрудно убедиться, что для случая транспортирования по трубопроводу ньютоновской среды (n = 1 и K ) соотношения
(17) и (18) для оптимальных параметров трубопровода обращаются в полученные ранее выражения (3) и (4).
Таким образом, полученные расчетные соотношения позволяют определить оптимальный диаметр трубопровода и давление, обеспечивающих перекачивание среды в ламинарном, установившемся, изотермическом режиме по трубопроводу из условия минимизации суммарных годовых затрат на его создание и эксплуатацию с учетом текущих цен и тарифов на трубопровод и электроэнергию, топологии трубопровода, условий его работы, а также аномалии вязкости транспортируемой среды.
Библиографический список
1.Кафаров В.В. Проектирование и расчет оптимальных систем технологических трубопроводов / В.В. Кафаров, В.П. Мешалкин. – М.: Химия, 1991. – 368 с.
2.Миркин А.З. Трубопроводные системы / А.З. Миркин, В.В. Усиньш. – М.: Химия, 1991. – 256 с.
3.Айнштейн В.Г. Процессы и аппараты химической технологии. Общий курс. В двух книгах. Книга 1: Учебник / В.Г. Айнштейн, М.К. Захаров и др. – СПб.: Лань, 2019. – 916 c.
4.Василенко А.И. Технико-экономическая оптимизация воздуховодов/ А.И. Василенко,
А.А. Федосенко // Инженерный вестник Дона,
2018. – № 1.
5.Самарин О.Д. Технико - экономическая оптимизация диаметров теплопроводов систем водяного отопления / О.Д. Самарин // Новости теплоснабжения. – 2011. – № 5. – С. 42 – 44.
С. 42 – 44.
6.Савастиенок А.Я. Оптимизация трубопроводных инженерных сетей гидравлического расчета / А.Я. Савастиенок // Энергетика. Известия высших учебных заведений и энергетических объединений СНГ. – 2006. – № 4. – С.67–72.
С.67–72.
7.Шабанов В.А. Целевые функции и критерии оптимизации перекачки нефти по нефтепроводам при частнотно - регулируемом электроприводе магистальных насосов / В.А. Шабанов, О.В. Бондаренко // Нефтегазовое дело. – 2012. – №4 –С. 10 – 17.
8.Зайцев А.В. Оптимизация криогенного трубопровода / А.В. Зайцев, Е.В. Логвиненко // Омский научный вестник. Серия «Приборы, машины и технологии». – 2014. – №3 (133). – С. 164
–168.
9.Иванов А.В. Постановка задачи оптимизации трубопроводных сетей средств наземного обслуживания общего применения / А.В. Иванов, В.В. Синюков, В.И. Ряжских, А.А. Хвостов, А.А. Журавлев // Современные методы прикладной математики, теории управления и компьютерных технологий: сб. тр. X междунар. конф. «ПМТУКТ-2017». – Воронеж: Изд-во «Научная книга», 2017. С. 180 – 183.
10.Хвостов А.А. Оптимизация параметров технологического трубопровода по технико-
21
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ В СТРОИТЕЛЬНЫХ, СОЦИАЛЬНЫХ И ЭКОНОМИЧЕСКИХ СИСТЕМАХ
экономическим показателям / А.А. Хвостов, М.Г. |
нов, В.Н. Матвеенко. – М.: ТЕХНОСФЕРА, 2016. |
Магомедов, А.А. Журавлев, Е.А. Шипилова, |
– 384 с. |
О.А. Семенихин, А.А. Никитченко // Вестник |
12. Арет В.А. Физико - механические |
ВГУИТ. 2020. Т. 82. № 1. С. 34 – 46. |
свойства сырья и готовой продукции [Текст] / В. |
11. Кирсанов Е.А. Неньютоновское пове- |
А. Арет, Б. Л. Николаев, Л. К. Николаев. – СПб.: |
дение структурированных систем / Е.А. Кирса- |
ГИОРД, 2009. – 448 с. |
Информация об авторах
Хвостов А.А. – доктор технических наук, профессор, Военный учебно-научный центр военно-воздушных сил «Военно-воздушная академия имени профессора Н. Е. Жуковского и Ю. А. Гагарина» (394064, Россия, г. Воронеж, ул. Старых Большевиков, 54А), e-mail: khvtol1974@yandex.ru
Иванов А.В. – кандидат технических наук, доцент, Военный учеб- но-научный центр Военно-воздушных сил «Военно-воздушная академия имени профессора Н. Е. Жуковского и Ю. А. Гагарина» (394064, Россия, г. Воронеж, ул. Старых Большевиков, 54А),
тел.: 8-920-410-5190
Журавлев А.А. – кандидат технических наук, доцент, Военный учебно-научный центр Военно-воздушных сил «Военно-воздушная академия имени профессора Н. Е. Жуковского и Ю. А. Гагарина» (394064, Россия, г. Воронеж, ул. Старых Большевиков, 54А), e-mail: zhuraa1@rambler.ru
Information about the authors
Khvostov A. A. – doctor of technical sciences, professor, Military training and research center of the air force «Аir force Academy named after Professor N.E. Zhukovsky and Yu.А. Gagarin» (54A, Starykh Bolshevikov str., Voronezh, 394064, Russia), e-mail: khvtol1974@yandex.ru Ivanov A.V. – candidate of technical sciences, associate professor, Military training and research center of the air force «Аir force Academy named after Professor N.E. Zhukovsky and Yu.А. Gagarin» (54A,
Starykh Bolshevikov str., Voronezh, 394064, Russia), ph.: 8-920-410-5190
Zhuravlev A.A. – candidate of technical sciences, associate professor,
Military training and research center of the air force «Аir force Academy named after Professor N.E. Zhukovsky and Yu.А. Gagarin» (54A,
Starykh Bolshevikov str., Voronezh, 394064, Russia), e-mail: zhuraa1@rambler.ru
УДК 004.021
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И РЕАЛИЗАЦИЯ ЗАДАЧИ ПОИСКА ОПТИМАЛЬНОЙ СТРАТЕГИИ ЗАМЕНЫ ОБОРУДОВАНИЯ В ВОЕННЫХ ПОДРАЗДЕЛЕНИЯХ
Е.А. Шипилова, А.А. Паненко
ВУНЦ ВВС «Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина
Аннотация: Рассматривается моделирование и программная реализация задачи поиска оптимальной стратегии замены автотранспортных единиц в военных подразделениях. В качестве метода решения используется метод динамического программирования. Приводится алгоритм и программная реализация выбранного метода решения
Ключевые слова: динамическое программирование, принцип оптимальности, принцип погружения, критерий оптимизации, многошаговый процесс, решение о сохранении или замене оборудования
MATHEMATICAL MODELING AND REALIZATION OF THE TASK OF FINDING THE OPTIMAL STRATEGY OF EQUIPMENT REPLACEMENT IN MILITARY UNITS
E.A. Shipilova, A.A. Panenko
MESC AF «N.E. Zhukovsky and Y.A. Gagarin Air Force Academy» (Voronezh)
Abstract: Modeling and programmatic implementation of the task of finding the optimal strategy of replacement of vehicles in military units are considered. Dynamic programming is used as the solution method. The algorithm and software implementation of the selected solution method are given
Keywords: dynamic programming, optimality principle, immersion principle, optimization criterion, multi-step process, decision to save or replace equipment
В каждой5 военной части для транспортировки личного состава, продуктов, вооружения, оборудования, вспомогательных материалов и т.д. используются автотранспорт-
© Шипилова Е.А., Паненко А.А., 2020
ное оборудование. При эксплуатации подвижного состава происходит его физический и моральный износ, в результате чего увеличиваются затраты на обслуживание и ремонт, снижается производительность, уве-
22
ВЫПУСК № 2 (20), 2020 |
ISSN 2618-7167 |
личиваются простои. Обычно подразделения сохраняют или заменяют оборудование в соответствии с планом проведения технического обслуживания и замены автомобилей, не применяя методы математического моделирования. Однако, опыт применения данных методов, показывает их целесообразность, так как это позволяет минимизировать затраты и максимизировать экономическую эффективность эксплуатации автотранспортного состава.
Для наиболее эффективного использования оборудования необходимо разрабатывать оптимальный план его использования и замены. Задачи по замене автотранспортного оборудования рассматриваются как многоэтапный процесс, который характерен для динамического программирования.
Цель исследования – разработать математическую модель для определения оптимального план замены автотранспортного оборудования, а также реализовать ее в виде пакета прикладных программ. Критерием оптимизации является максимизация экономической эффективности использования оборудования, или минимизация суммарных затрат на его эксплуатацию в течение планируемого периода.
Динамическое программирование представляет собой математический аппарат, позволяющий осуществлять оптимальное планирование многошаговых управляемых процессов и процессов, зависящих от времени [1, 2]. Совокупность решений, принимаемых в начале каждого года планируемого периода по замене оборудования, финансированию и т.д., является управлением. Началом этапа (шага) управляемого процесса считается момент принятия решения (о замене оборудования, ремонте и т.д.). Под этапом обычно принимают хозяйственный год. Такой подход позволяет не только упростить решение задачи, но и решить те из них, к которым нельзя применить методы математического исследования. Упрощение решения достигается за счет значительного уменьшения количества исследуемых вариантов, так как вместо того, чтобы один раз решать
сложную многовариантную задачу, метод поэтапного планирования предполагает многократное решение относительно простых задач.
Предположим, что развитие динамической системы происходит следующим образом:
1)в начальный момент времени t0 система находится в фиксированном состоянии 0;
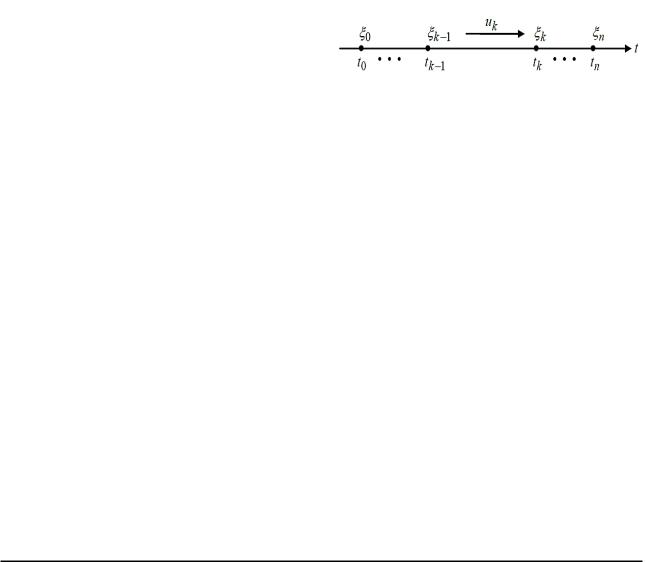
2)переход k-1 k от состояния в момент tk–1 к состоянию в момент tk осуществляется в зависимости от управления (рис. 1). То есть имеется набор управлений, каждое из
которых позволяет перейти от состояния k-1 к одному из возможных состояний k, выбранное управление обозначим uk, т.е.:
|
( |
) |
(1) |
Рис. 1. Схема метода динамического программирования
Максимальный суммарный доход или условный максимальный доход на участке [k–1, n] зависит от состояния k-1, и определяется по формуле [3]:
( ) |
{ ( |
) |
( )} |
(2) |
где максимум берется по всем возможным управлениям на k-м шаге, k – состояние, в которое переходит система из состояния k-1 под действием управления uk.
В основе методов динамического программирования лежат принцип оптимальности и принцип погружения:
при построении оптимальной траектории нужно выбирать управление на каждом шаге так, чтобы доход на этом шаге плюс максимальный доход на последующих шагах был наибольшим.
форма задачи, решаемая методом динамического программирования, не меняется при изменении количества шагов n, т.е.
23

ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ В СТРОИТЕЛЬНЫХ, СОЦИАЛЬНЫХ И ЭКОНОМИЧЕСКИХ СИСТЕМАХ
форма такой задачи инвариантна относительно n.
Реализация названных принципов дает гарантию того, что решение, принимаемое на очередном шаге, окажется наилучшим относительно всего процесса в целом, а не узких интересов данного этапа. Последовательность пошаговых решений приводит к решению исходной n-шаговой задачи.
Эти правила лежат в основе алгоритма решения задачи динамического программирования, состоящего из двух этапов. То есть, в процессе оптимизации управления многошаговый процесс проходится дважды. Первый раз – от конца к началу, в результате чего находятся условно-оптимальные управления и условно-оптимальное значение функции цели для каждого шага, в том числе оптимальное управление для первого шага и оптимальное значение функции цели для всего процесса. Второй раз – от начала к концу, в результате чего находятся уже оптимальные управления на каждом шаге с точки зрения всего процесса [4].
Конкретно задача о замене оборудования ставится следующим образом. Определить оптимальные сроки замены оборудования в течение n лет, при которых прибыль от эксплуатации оборудования максимальна, если известны: p – начальная стоимость оборудования; R(t) – прибыль, получаемая от эксплуатации оборудования возраста t лет;
r(t) – ежегодные затраты на эксплуатацию оборудования возраста t лет. Предполагается, что к началу планового периода оборудование является новым.
Представим данную задачу с точки зрения динамического программирования
[3, 4]:
1)под k-м шагом будем понимать k-й год планируемого периода. Имеем n шагов;
2)под состоянием k будем понимать возраст оборудования к концу k-го шага или к началу k+1-го шага. Отсюда вытекает, что на
каждом шаге состояние k может принимать следующие значения: 0, 1, 2,…, k; 0 = 0;
3) в качестве управления uk на каждом шаге выступают решения о замене и сохранении оборудования.
Обозначим через u решение о сохранении оборудования; u* – решение о замене оборудования.
Формула (1) для данной задачи имеет
вид:
|
{ |
(3) |
Построим аддитивную целевую функцию. Согласно условию задачи прибыль от эксплуатации оборудования на k-м шаге, в зависимости от управления, будет выражаться следующим образом:
( |
( |
) |
( ) |
|
) { ( ) |
( ) |
( ) |
(4) |
Очевидно, прибыль за n лет составит:
∑ ( )
Формула (2) для нашей задачи преобразуется следующим образом:
( |
) |
|
|
( ) |
( ) |
(6) |
|
|
|
|
|
|
|
( |
) |
|
|
|
|
|
|
|
|
[ ( ) |
|
( |
)] (7) |
|
|
|
|
|
|
k = 1, 2, …, n–1.
Находятся, начиная с конечной точки ( ) и ( ) по формулам (6, 7)
для всех возможных значений k стратегии поведения (сохранить или заменить оборудование). Реализуем второй этап, т.е. находим оптимальные управления на каждом шаге с точки зрения всего процесса. Проходя пошагово процесс по всему рассматриваемому временному периоду, получим оптимальную стратегию управления. Алгоритм
24
ВЫПУСК № 2 (20), 2020 |
ISSN 2618-7167 |
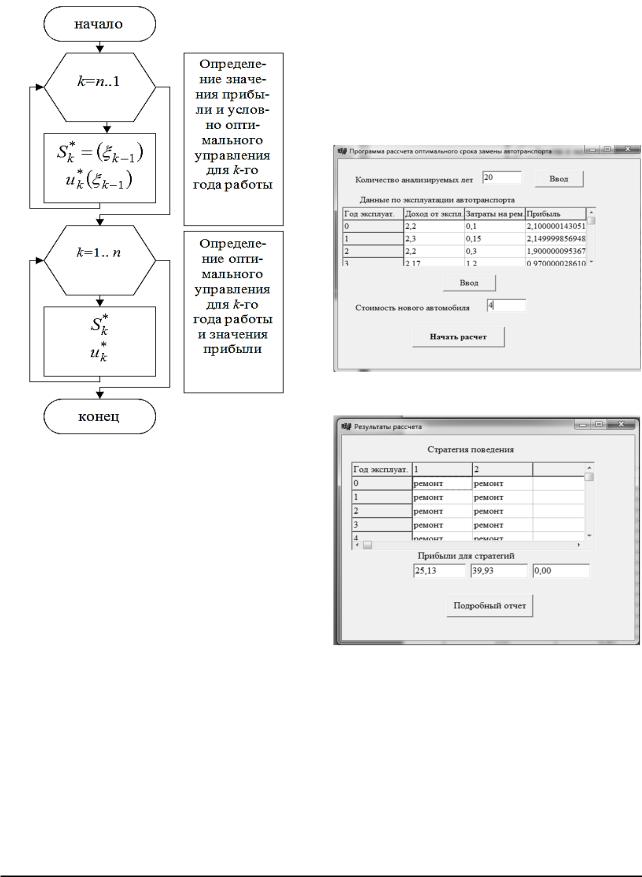
реализации поиска оптимального плана замены оборудования, представлен на рис. 2.
ведения по годам рассматриваемого периода
– ремонт или замена оборудования и рассчитанные значения прибыли для каждой предлагаемой стратегии поведения. Наиболее выгодной стратегии поведения соответствует максимальная прибыль, поэтому при выборе из нескольких возможных вариантов поведения выбирается тот, которому соответствует максимальная прибыль.
Рис. 3. Форма ввода данных.
Рис. 2. Алгоритм поиска оптимального плана замены оборудования
Для реализации математической модели был разработан пакет прикладных программ. В качестве средства разработки программного продукта использовано Borland C++ BUILDER 6 как наиболее оптимальное средство разработки с точки зрения разработчика. Программный пакет включает в себя три модуля: ввода данных, вывода результатов и вывода подробных результатов.
В качестве входных данных выступают: количество анализируемых лет, доход от эксплуатации оборудования и затраты на ремонт по годам. После ввода данных автоматически при нажатии кнопки «Ввод» рассчитывается значение прибыли, кнопкой «Начать расчет» запускается основной расчет (рис. 3).
Второй модуль программного пакета – вывод результатов (рис. 4) включает форму с таблицей, в которой выводятся стратегии по-
Рис. 4. Форма второго модуля программного продукта «Вывод результатов»
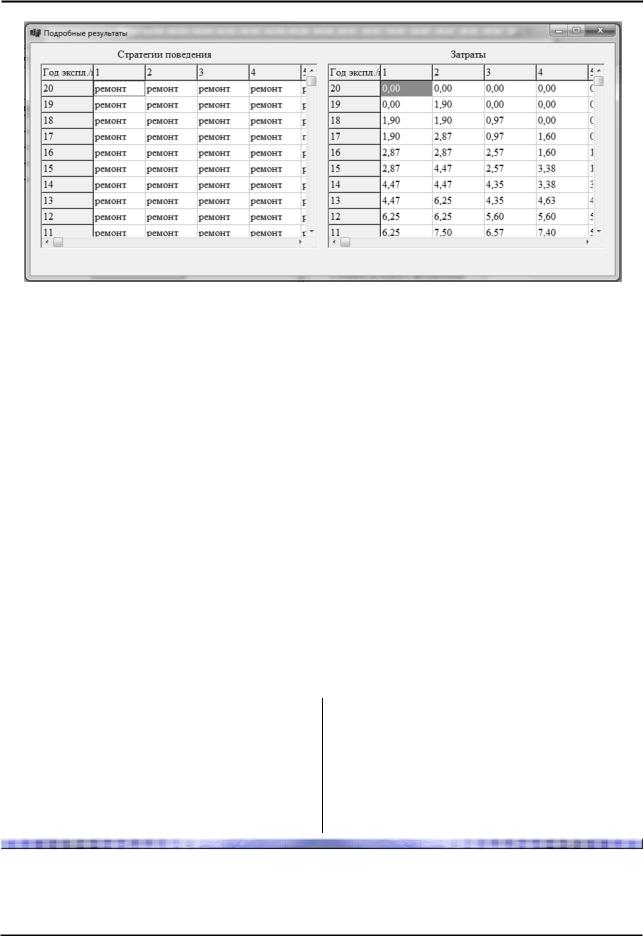
Для просмотра подробностей расчета предусмотрен вывод третьего модуля программного продукта «Вывод подробных результатов» (рис. 5) при нажатии кнопки «Подробный отчет». На данной форме можно проследить прямой и обратный ходы метода динамического программирования, для исключения возможной неточности.
25
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ В СТРОИТЕЛЬНЫХ, СОЦИАЛЬНЫХ И ЭКОНОМИЧЕСКИХ СИСТЕМАХ
Рис. 5. Форма подробного отчета – третьего модуля программного продукта
Анализируя результаты работы программы можно сделать вывод, что программный продукт работает правильно, расчеты выполняются верно, полученные значения совпадают с аналитическими расчетами. Выход из режима выполнения программы осуществляется нажатием кнопки с изображением креста в правом верхнем углу форм.
Разработанный программный продукт обладает следующими достоинствами:
позволяет осуществить расчет оптимальной стратегии замены автотранспортного оборудования и экономическую эффективность каждой стратегии;
является универсальным средством расчета, т.к. позволяет вести вычисления для различных анализируемых периодов времени и экономических показателей эффективности;
Информация об авторах
Шипилова Е.А. – кандидат технических наук, доцент, Военный учебно-научный центр Военно-воздушных сил «Военно-воздушная академия имени профессора Н. Е. Жуковского и Ю. А. Гагарина» (394064, Россия, г. Воронеж, ул. Старых Большевиков, 54А), e-mail: elen_ship@list.ru
Паненко А.А. – курсант 2 курса, Военный учебно-научный центр Военно-воздушных сил «Военно-воздушная академия имени профессора Н. Е. Жуковского и Ю. А. Гагарина» (394064, Россия, г.
Воронеж, ул. Старых Большевиков, 54А), тел.: 8-473-244-7830
обеспечивает высокую скорость расчета;
имеет интуитивно понятный интерфейс;
может использоваться на персональных компьютерах с ОС Windows любой версии;
прост и понятен в использовании;
устойчив к сбоям и зацикливаниям.
Библиографический список
1.Акулич И.Л. Математическое программирование в примерах и задачах: Учебное пособие. 3-е изд., стер. СПб.: Лань, 2011. – 352 с.
2.Колемаев В.А. Математическая экономика.- М.: Юнити,1998.
3.Романовская А.М. Динамическое программирование: Учебное пособие. Романовская А.М., Мендзив М.В.– Омск: Издатель Омский институт (филиал) РГТЭУ, 2010. – 58 с.
4.Судоплатов С.В., Овчинникова Е.В. Элементы дискретной математики. – М.: ИН- ФРА-М, Новосибирск: Изд-во НГТУ, 2002. 386 с.
Information about the authors
Shipilova E.A. – candidate of technical sciences, associate professor,
Military training and research center of the air force «Аir force Academy named after Professor N.E. Zhukovsky and Yu.А. Gagarin» (54A,
Starykh Bolshevikov str., Voronezh, 394064, Russia), e-mail: elen_ship@list.ru
Panenko A.А. – cadet of 2 course, Military training and research center of the air force «Аir force Academy named after Professor N.E. Zhukovsky and Yu.А. Gagarin» (54A, Starykh Bolshevikov str., Voronezh,
394064, Russia), ph.: 8-473-244-7830
26

ВЫПУСК № 2 (20), 2020 |
ISSN 2618-7167 |
УДК 666.97
АВТОМАТИЗАЦИЯ НЕПРЕРЫВНОГО ДОЗИРОВАНИЯ КОМПОНЕНТОВ БЕТОННЫХ СМЕСЕЙ
С.И. Поляков, А.С. Ухин, С.Г. Челышев
Воронежский государственный технический университет
Аннотация: Рассматриваются вопросы автоматизации непрерывного дозирования компонентов бетонных смесей для обеспечения требуемой точности дозирования
Ключевые слова: непрерывное дозирование, автоматизация, точность
AUTOMATION OF CONTINUOUS DOSING OF CONCRETE COMPONENTS
S.I. Polyakov, A.S. Ukhin, S.G. Chelyshev
Voronezh State Technical University
Abstract: The issues of automation of continuous dosing of concrete mix components to ensure the necessary dosing accuracy are considered
Keywords: continuous dosing, automation, accuracy
Как и для дозаторов6 дискретного дей- |
перемешивание |
составляющих бетонной |
|||||
ствия, та же погрешность дозирования |
смеси и ее перемещение к выгрузочному |
||||||
должна обеспечиваться и для непрерывного |
люку. Смеситель гравитационный в виде ци- |
||||||
весового автоматического дозирования ма- |
линдрического барабана с прикрепленными |
||||||
териалов весовым оборудованием непрерыв- |
плоскими лопастями обеспечивает непре- |
||||||
ного действия в составе БСУ. Для ав- |
рывное смешивание компонентов и их пере- |
||||||
томатизации заводов непрерывного действия |
мещение от загрузки к выгрузке. |
||||||
и бетоносмесительных установок предназна- |
|
На производстве завода ЖБИ-2 в цехе |
|||||
чены дозаторы непрерывного принципа дей- |
БСУ после внедрения АСУ ДБС-2 управле- |
||||||
ствия, для которых создано несколько типов |
ние |
процессом |
дозирования |
компонентов |
|||
таких дозаторов для производства бетонных |
бетонных смесей осуществлялась с дисплея |
||||||
смесей. |
|
|
промышленного |
компьютера: |
подача ко- |
||
Состав типовых |
бетоносмесительных |
манд на дозирование компонентов и разгруз- |
|||||
установок мало чем отличается друг от друга |
ку бункеров, установка величины упрежде- |
||||||
и содержит следующее оборудование и пло- |
ния веса, корректировка состава смеси, вы- |
||||||
щадки: отделение дозирования заполнителей |
бор марки смеси и так далее. На дисплей вы- |
||||||
смесей, отделение дозирования цемента, |
водилась необходимая информация о ходе |
||||||
бункеры цемента, отделение непрерывного |
технологического процесса и состоянии си- |
||||||
смешивания, конвейер наклонный, отделе- |
стемы дозирования [1, 2]: |
|
|||||
ние подачи воды и отделение операторов. |
размерность шкалы весового устрой- |
||||||
БСУ предназначены для выдачи бетонных |
ства, |
|
|
|
|||
смесей, а также отдельных компонентов сме- |
|
установка упреждение веса на дозиро- |
|||||
си, прошедших через весы непосредственно |
вание, |
|
|
||||
в бетоносмеситель автомобильный. |
выбор требуемого режима дозирова- |
||||||
В установках может использоваться бе- |
ния, |
|
|
|
|||
тоносмеситель непрерывного действия как |
|
установка наличия в соответствующем |
|||||
гравитационный, так |
и принудительного |
бункере дозируемого материала, |
|||||
действия. Смеситель принудительного дей- |
|||||||
|
установка |
длительности |
импульса до- |
||||
ствия двухвальный шнековый обеспечивает |
вешивания, |
|
|
||||
|
|
|
|
|
|||
|
|
|
|
фактические и заданные дозы компо- |
|||
© Поляков С.И., Ухин А.С., Челышев С.Г., 2020 |
|||||||
|
|
|
|
||||
27
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ В СТРОИТЕЛЬНЫХ, СОЦИАЛЬНЫХ И ЭКОНОМИЧЕСКИХ СИСТЕМАХ
нентов смеси, |
корректировка начального отсчета (ре- |
возникшие сбои в весоизмерительном |
пера) датчиков веса. |
оборудовании, |
|
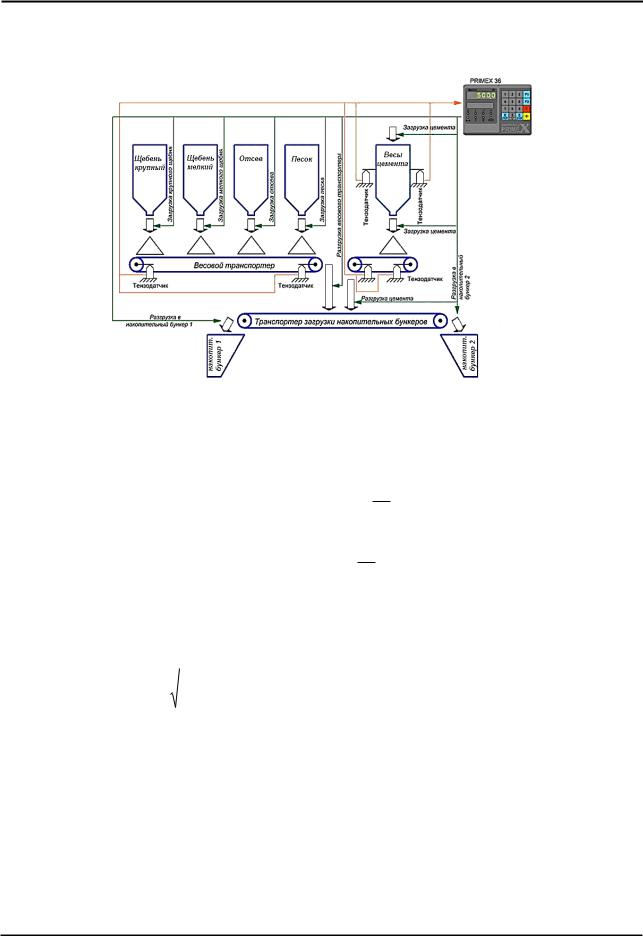
Рис. 1. Структурная схема БСУ непрерывного действия
Упреждение представляет динамическую погрешность дозирования. Эта погрешность определяется как разность между показанием весоизмерительной системы в некоторый момент времени и показанием весоизмерительной системы массы материала, если в этот же момент времени появится команда на окончание подачи материала.
Получены опытные данные по исследованию на оборудовании непрерывным дозатором по точности дозирования цемента при автоматическом управлении.
Общее количество выполненных опытных измерений фактической массы n=20. Среднее значение массы измеренных доз
mср= 201 (33,0+33,3+33,2+...+32,8)=32,95 (кг);
Величина среднего отклонения
M= 201 (0,05+0,35+0,25+...+0,15)=0,24 (кг);
Отклонение среднеквадратичное фактических измеренных масс от среднего значения масс
|
|
|
|
|
|
|
|
=1,013 |
1 |
(0,0025 0,1225 0,0625 ... 0,0225) =0,328 (кг); |
|||||
19 |
|||||||
|
|
|
|
|
|
||
Отклонение максимальное от среднего |
Еmax= |
1,034 |
100% =3,13%. |
||||
значения массы измеренных доз |
|
||||||
33,0 |
|
||||||
|
|
|
|
||||
bmax =3*0,328=0,984 (кг); |
Полученные опытные данные позво- |
||||||
Отклонение максимальное от заданной |
ляют сделать следующий вывод. Относи- |
||||||
тельная погрешность весового дозирования |
|||||||
массы дозы |
|
|
|||||
|
|
при автоматическом управлении снизилась в |
|||||
|
|
|
|||||
max = 0,984+ 32,95-33,0 =1,034 (кг) |
3 раза, тогда как при ручном управлении она |
||||||
Погрешность относительная весового |
составляла 9,21%. Но и при автоматическом |
||||||
|
|
|
|
||||
дозирования |
управлении проблема точности дозирования |
|
28

ВЫПУСК № 2 (20), 2020 |
|
|
|
|
ISSN 2618-7167 |
|
остается и превышает погрешность в соот- |
ствами. |
|||||
ветствии с требованиями ГОСТ в 1,5 раза. |
|
Системой управления весового дозато- |
||||
Анализ |
опытных |
данных |
позволяет |
ра предусмотрена организация обмена дан- |
||
утверждать, что при обработке приведенной |
ными с верхним уровнем АСУТП бетонос- |
|||||
выборки точность весового дозирования не |
месительного цеха по предлагаемым вариан- |
|||||
соответствует требованиям ГОСТ. Внедре- |
там: |
|
||||
ние автоматической |
системы |
управления |
|
– обмен данными по интерфейсу |
||
проблему точности не решило, хотя и улуч- |
Ethernet; |
|||||
шило общую ситуацию. Это объясняется |
|
– обмен данными по интерфейсу RS- |
||||
тем, что АСУ полностью не реализовало ма- |
485; |
|
||||
тематическое и алгоритмическое обеспече- |
|
– обмен данными по протоколу Modbus |
||||
ние, связанное с моделированием процессов |
RTU и интерфейсу RS-485. |
|||||
непрерывного дозирования материалов. |
|
Кроме того, система управления преду- |
||||
Дозаторы непрерывного действия поз- |
сматривает аналоговый вход для установки |
|||||
воляют решить следующие задачи: |
задания производительности весового доза- |
|||||
– передача значений величин вычисля- |
тора в диапазоне 4-20 мА и аналоговый вы- |
|||||
емых и измеряемых в АСУ предприятия |
ход для вывода фактического значения те- |
|||||
верхнего уровня по интерфейсу RS-485; |
кущей производительности в диапазоне 4-20 |
|||||
– измерение фактического значения ве- |
мА. |
|
||||
са дозируемого материала, вычисление фак- |
|
Автоматизированная система управле- |
||||
тического расхода дозируемого |
материала |
ния технологическим процессом непрерыв- |
||||
через дозатор; |
|
|
|
|
ного |
дозирования компонентов бетонных |
– в системах автоматического управле- |
смесей разработана для реализации автома- |
|||||
ния регулирование заданного значения рас- |
тического режима управления весовыми не- |
|||||
хода материала при непрерывном весовом |
прерывными дозаторами. АСУТП весового |
|||||
дозировании; |
|
|
|
|
непрерывного дозирования обеспечивает пе- |
|
– индикация заданных, измеренных и |
редачу данных в АСУТП верхнего уровня о |
|||||
вычисленных |
следующих технологических |
процессе дозирования, подготовку отчетов |
||||
параметров: |
|
|
|
|
по работе весового оборудования и учету |
|
а) заданное значение производительно- |
исходных компонентов, особенно цемента, |
|||||
сти; |
|
|
|
|
хранение и накопление различных данных о |
|
б) значение суммарной массы дозируе- |
работе оборудования и процессе дозирова- |
|||||
мого материала [кг] или [т]; |
|
ния, |
наглядное отображение процесса дози- |
|||
в) величина текущей грузоприемной |
рования, а также расхода компонентов бе- |
|||||
нагрузки [кг/м]; |
|
|
|
тонных смесей. Понятно, что предлагаемое |
||
г) величина рассогласования фактиче- |
программное обеспечение, реализующие пе- |
|||||
ской производительности от заданной, вы- |
речисленные задачи, решаемые АСУТП, яв- |
|||||
раженной в %; |
|
|
|
|
ляются важной частью системы управления |
|
д) величина производительности весо- |
непрерывным дозированием. |
|||||
вого дозатора в настоящий момент времени |
|
Перечислим функции, которые выпол- |
||||
[кг/с] или [т/ч]; |
|
|
|
няет система управления дозированием ма- |
||
– вычисление рассогласования текущей |
териалов: |
|||||
производительности |
весового дозатора от |
|
- вывод на печать и создание соответ- |
|||
заданного значения; |
|
|
|
ствующих отчетов; |
||
– управление внешними периферий- |
|
- контроль состояния весового обору- |
||||
ными устройствами: счетчиками импульсов, |
дования, сигнализация о возникших аварий- |
|||||
реле электромагнитными, реле интеллекту- |
ных ситуациях; |
|||||
альными, вибраторами |
и прочими устрой- |
|
- фиксирование суммарного расхода |
|||
29