

Учебное пособие 2165
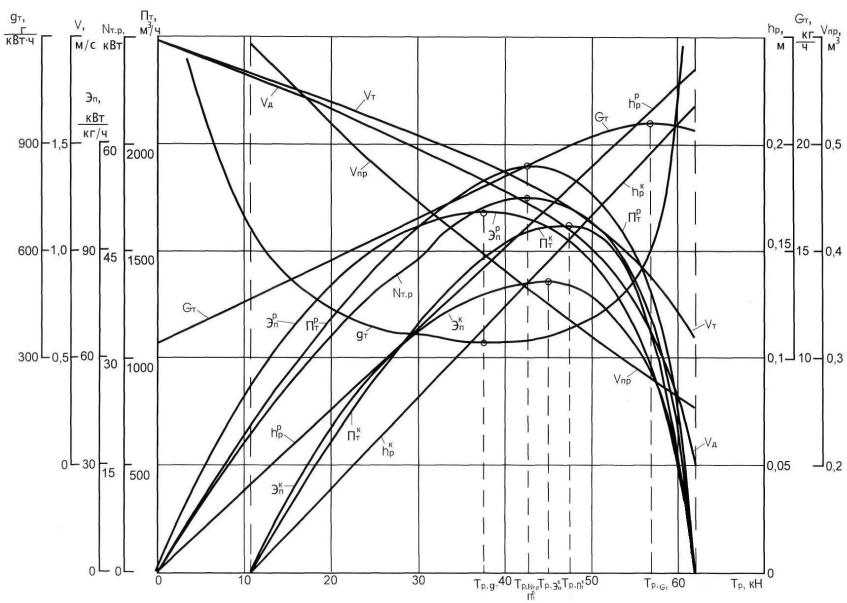
.pdfНа рис. 3.9 приведена развернутая тяговая характеристика автогрейдера класса 180 ДЗ – 122А – 2 при разработке грунта на горизонтальном участке
всей длиной ножа косопоставленного отвала на первой передаче с TР t = TР = =const на каждой ступени нагружения путем заглубления отвала на соответствующую глубину резания hР . Автогрейдер был укомплектован дизельным двигателем А – 01 М с номинальной мощностью NДВ.Н = 99 кВт, гидро-
механической коробкой передач У 35.605 – 32 с однореакторным комплексным гидротрансформатором и шинами размером 14.00 – 20 модели Я – 307. Разрабатываемый грунт – свежесрезанный суглинок III категории с прочностью по ударнику ДорНИИ 12…17 ударов и массовой влажностью 15…18 %. Параметры отвала: длина B0 = 3,724 м, высота H0 = 0,632 м, угол резания
δ= 350, угол захвата α = 450 , угол наклона γ = 0.
Вотличие от стандартной тяговой характеристики, которую получают по результатам тяговых испытаний ЗТМ с помощью тормозного агрегата, имитирующего тяговую нагрузку на рабочем органе, данная характеристика (рис. 3.9) получена по результатам копания грунта в реальных условиях [120]. Копание грунта является комплексным процессом его разработки и включает в себя резание (отделение от массива стружки грунта) и заполнение вырезанным
грунтом рабочего органа (отвала или ковша). Сила тяги на рабочем органе TР затрачивается на преодоление сопротивления грунта копанию PK . Для автогрейдера при копании грунта на горизонтальном участке и установившемся режиме
TР PК PР PПР PЗАП , |
(3.68) |
|
где PР – сопротивление грунта резанию; |
PПР – сопротивление перемещению |
|
призмы вырезанного грунта объемом VПР |
по грунту; |
PЗАП – сопротивление |
заполнению отвала вырезанным грунтом при его движении вверх и вдоль по отвалу.
211
212
Рис. 3.9. Тяговая характеристика автогрейдера ДЗ – 122А – 2 при разработке грунта
При резании грунта всей длиной ножа косопоставленного отвала
|
PР B0hP sin ΚР , |
(3.69) |
где ΚР – |
удельное сопротивление грунта резанию, а |
произведение |
B0hP sin FР |
представляет собой площадь поперечного сечения вырезанной в |
|
плотном теле стружки грунта на направление движения машины. |
|
|
Сопротивления PПР и PЗАП пропорциональны объему призмы вырезанного грунта VПР , максимальное значение которого для ЗТМ отвального типа
определяется размерами рабочего органа.
На характеристике автогрейдера (см. рис. 3.9) дополнительно представлены в функции силы тяги на рабочем органе TР следующие параметры: T – теоретическая скорость движения машины, то есть окружная скорость ведущих колес; VПР – объем призмы вырезанного грунта для глубины резанья hРк при заданном значении TР ; hРк , hРp – глубина резания при заданном значении TР для процесса копания (с учетом призмы вырезанного грунта) и для процесса только резания (при отсутствии призмы вырезанного грунта); ПкТ , ПТp – техническая производительность процессов копания и резания грунта; ЭкП , ЭpП –
энергетические показатели процессов копания и резания грунта.
Итак, в процессе копания грунта автогрейдером из массива вырезается грунт в виде стружки с площадью поперечного сечения FР B0hP sin , который формирует призму объемом VПР и заполняет рабочий орган. Техническая
производительность рассчитывается по объему грунта, вырезанному в плотном теле. Для ЗТМ непрерывного действия, в данном случае автогрейдера, при вырезании грунта из массива всей длинной ножа косопоставленного под углом
α отвала на установившемся режиме с hР = const и Д = const значения текущей
ПТ t и средней ПТ технических производительностей одинаковы |
|
||||
|
|
ПТ t ПТ FР Д B0hP sin Д const . |
(3.70) |
||
У автогрейдера ДЗ – 122А – 2 максимальный объем призмы грунта перед |
|||||
отвалом при h |
= 0 составляет V |
|
= 0,595 м3 и для его перемещения тре- |
||
|
Р |
ПР MAX |
|
|
|
буется тяговое усилие на рабочем органе TР = 10,7 кН. С увеличением глубины |
|||||
резания hР |
поверхность отвала для размещения объёма призмы вырезанного |
||||
грунта VПР |
уменьшается и при hРMAX = 0,218 м он составляет VПР MIN = 0,255 м3, а |
||||
сопротивление |
копанию в этом |
случае достигает максимальной |
величины |
||
PКMAX = 62 кН, которая соответствует значению максимальной силы тяги на
213
рабочем органе по сцеплению TР . Для реализации TР = 62 кН достаточно заглубить отвал на величену hР = 0,235м при этом процесс разработки грунта прекращается, так как Д = 0 при коэффициенте буксования движителя 100%.
По графикам, представленным на рис. 3.9, анализируем известные режи-
мы разработки грунта при NДВMAX , NТ.РMAX , ПТ MAX и gT MIN . |
|
На установившемся режиме работы двигателя его мощность равна |
|
NДВ НИ i MGT / 3600 (кВт), |
(3.71) |
где НИ – удельная теплота сгорания топлива (для дизельного топлива |
НИ = |
=41900…42500), кДж/кг; i M – индикаторный и механический КПД двигателя; GT – подача (расход) топлива в двигатель, кг/ч.
Режим NДВMAX соответствует режиму GT MAX и имеет место при TР = 57 кН. Режим NТ.Р MAX = 52,7 кВт имеет место при TР = 42,5 кН. Режим gT MIN = =356,7г/(кВт ч) имеет место при TР = 37,5 кН. Режим ПTKMAX = 1627,4 м3/ч имеет место при TР = 47,5 кН. Как видим, эти режимы не совпадают друг с другом по величине тяговой нагрузки TР . На этот факт было подробно указано в работах
[32, 33, 34].
На режиме NДВMAX максимально используется энергетический потенциал
двигателя, но не реализуются в полной мере тяговые возможности машины, а следовательно, имеет место весьма низкая ее производительность при разра-
ботке грунта. На режиме NТ.Р MAX формально максимально используются тяго-
вые возможности машины, но этот режим не учитывает механику процесса взаимодействия рабочего органа с грунтом при его копании, а значит не сможет
обеспечить максимальную производительность ПTKMAX . Режим NТ.Р MAX будет соответствовать максимальной производительности ПTP MAX , когда сила тяги на рабочем органе TР , а значит и тяговая мощность NТ.Р , будут затрачиваться только на вырезание стружки грунта. В реальных условиях вырезанный грунт формирует призму, создающую сопротивления PПР и PЗАП , на преодоление которых необходимо затратить дополнительно соответствующее значение TР , а значит и NТ.Р . Таким образом, режим NТ.Р MAX не может быть принят за опти-
мальный. Режимы gT MIN и Т MAX |
являются идентичными, так как |
|
Т NТ.Р / NДВ 3600NТ.Р |
/ НИ i MGT 3600 / НИ i M gT , |
(3.72) |
214
и, по высказанным замечаниям относительно режимов NДВMAX и NТ.Р MAX , не могут быть оптимальными. Как было установлено в работе [36], совмещение режимов NТ.Р MAX и Т MAX по тяговому усилию TР невыполнимо. Режим ПTKMAX
является реальным. Он отражает механику процесса взаимодействия рабочего органа с грунтом, но не отражает полностью физическую картину процесса разработки грунта, а именно его энергетическую сторону.
Режим ЭКП MAX = 84 м3/кг (см. рис. 3.9) имеет место при TР = 45 кН и является промежуточным между режимами ПTKMAX и gT MIN , позволяя при незначи-
тельном уменьшении производительности на 0,25%, сократить удельный расход топлива на 5,8% и тем самым получить при копании грунта увеличение количества разработанного грунта на единицу затраченного энергоносителя на
4,4% по сравнению с режимом ПTKMAX . Это соответствует современным энергосберегающим технологиям.
Режимы gT MIN и ЭРП MAX являются идентичными, так как
ЭПР ПТР / GT FР Д / GT NТ.Р / КРGT 1/ КР gT . |
(3.73) |
В процессе копания грунта призма волочения объемом VПР |
создает до- |
полнительные сопротивления PПР и PЗАП , что требует для их преодоления дополнительных затрат TР и NТ.Р , а это вызывает уменьшение скорости движения машины υд или же для ее сохранения требуется уменьшить глубину резания, поэтому hPK < hPP при том же значении TР и Д . Таким образом, для одного и того же силового режима TР кривые ПТР и ЭРП располагаются выше кривых ПTK и ЭКП (см. рис. 3.9).
Это явление особенно существенно при копании грунта ЗТМ циклического действия (скрепер, бульдозер и автогрейдер при угле захвата отвала α = =900), когда текущий объем вырезанного грунта перед рабочим органом
(отвалом) в виде призмы VПР t или внутри его (в ковше) и связанные с ним сопротивления в процессе копания PПР t , PЗАП t непрерывно возрастают, что
приводит к уменьшению текущих энергетических затрат непосредственно на вырезание грунта из массива и, как следствие этого, к уменьшению текущих
значений Д t , ПТ t , к возрастанию GT t и уменьшению текущего значения ЭП t . Таким образом, чтобы обеспечить в процессе копания грунта ЗТМ циклического действия текущее значение энергетического показателя на максимальном уровне ЭП t MAX , необходимо непрерывно выглублять рабочий орган, то есть уменьшать текущее значение глубины резания hР t . Анало-
215
гично происходит и при копании грунта ЗТМ циклического действия на режиме NТ.Р MAX , но с более высокой интенсивностью уменьшения глубины резания
hР t [22]. При этом текущее значение NТ.Р t MAX = NТ.РMAX = const в отличие от
ЭП t MAX = varia, |
так как на режиме NТ.Р MAX = const TР t = TР |
= const и Д t = |
|||||
= |
Д |
= const, а |
h |
t = varia, F t = varia, |
ПK t = varia, |
G |
t = G = const и |
|
|
Р |
Р |
T |
T |
T |
|
ЭП t = ПTK t |
/ GT t = varia, хотя для каждого текущего оптимального значе- |
||||||
ния глубины резания hР t ОПТ будет максимальным текущее значение ЭП t MAX . Все это объясняется увеличением в процессе копания текущего объема призмы вырезанного грунта VПР t , которая у ЗТМ непрерывного действия для заданного текущего значения hР t = hР = const остается с постоянным объемом
VПР t = VПР = const.
Выводы:
1. Существующие режимы разработки грунта ЗТМ не позволяют в полном объеме решить проблему повышения их эффективности.
2. Данную проблему необходимо решать на основе системного подхода и энергетической концепции к процессу разработки грунта с использованием
предлагаемого критерия – максимума энергетического показателя ЭП t max и соответственно ему режима разработки грунта при ЭП MAX .
3. Энергетический показатель ЭП является интегральным и включает в
себя все ныне известные в теории ЗТМ показатели оценки эффективности, так как выражается через входную и выходную координаты рабочего процесса ЗТМ и ее энергетического потока, что подтверждает его системный характер.
Следовательно, и режим разработки грунта при ЭП MAX является обобщенным
режимом, позволяющим решать проблему повышения эффективности ЗТМ комплексно, системно.
3.5. Математическая основа управления процессом функционирования ЗТМ
Функционирование ЗТМ, связанное с разработкой (копанием) грунта, представляет собой управляемый энергетический процесс технической системы «ЗТМ – грунт» [43, 78], входной координатой которого является подача энергоносителя в двигатель GT t , а выходной – количество разработанного в
единицу времени грунта, т.е. техническая производительность ПТ.К t , которая для данной машины и грунта эквивалентна реализованной на рабочем органе механической энергии с тяговой мощностью NT.P t . Поэтому процесс копания
216
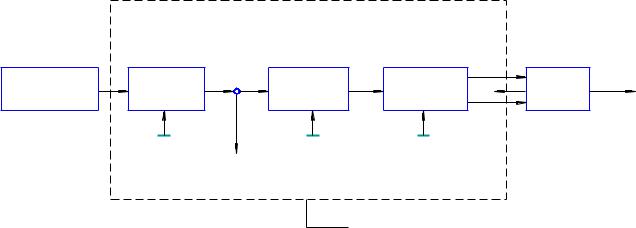
грунта ЗТМ по своей физической сущности – это энергетический поток (3.66) (см. рис. 3.10):
GT t NДВ t NTP t NT.P t ПТ.К t ,
где GT t – величина подачи энергоносителя (для двигателя внутреннего сгорания ДВС – углеводородного топлива, кг/ч) в двигатель (энергетическую машину); NДВ t – эффективная мощность механической энергии, развиваемая
двигателем на выходном валу, кВт; NTP t – мощность механической энергии, передаваемой от двигателя в трансмиссию передаточного механизма с учётом отбора части мощности двигателя NДВ.ОТБ t на привод вспомогательных меха-
низмов NВМ t и исполнительных механизмов NИМ t управления рабочим органом, кВт; NT.P t – тяговая мощность механической энергии, подведённая
к рабочему органу технологической машины от двигателя с помощью передаточного механизма, включающего трансмиссию, движитель, тяговую или
толкающую раму, соединяющую движитель с рабочим органом, и реализуемая |
|
непосредственно на разработку грунта, кВт; VГР t – объём грунта, разработан- |
|
ного в плотном теле, м3; П |
t dV t / dt – техническая производитель- |
Т.К |
ГР |
ность ЗТМ при копании грунта, м3/ч.
GT (t) |
NДВ (t) NТР (t) |
|
N |
(t) |
|
NТ.Р |
(t) |
|
V |
(t) |
Передаточный |
Рабочий |
|
|
|
||||||
Энергоноситель |
Двигатель |
Т.Р |
|
РК (t) |
Грунт |
Г.Р |
|
|||
механизм |
|
|
орган |
|
|
|||||
|
|
|
|
|
ПТ.К (t) |
|||||
|
|
|
|
|
|
ТР (t) |
|
|||
|
|
|
|
|
|
|
|
|
||
|
uДВ |
uКП |
|
|
uPO (t)=hP (t) |
|
|
|
|
|
|
NДВ.ОТБ (t) |
|
|
|
|
|
|
|
|
|
|
|
ЗТМ [ЭП.ЗТМ (t)] |
|
|
|
|
|
|
|
|
 VД (t)
VД (t)
Рис. 3.10. Энергетический поток процесса разработки грунта ЗТМ
Из сказанного следует, что копание грунта ЗТМ осуществляется на тяговом режиме её работы за счёт механической энергии с тяговой мощностью NT.P t , генерируемой тяговым приводом и реализуемой на рабочем органе с
технической производительностью ПТ.К t . Тяговый привод включает в себя энергетическую машину (двигатель) – непосредственный генератор механи-
217

ческой энергии, передаточный механизм, включающий в себя трансмиссию, движитель и раму, соединяющую движитель с рабочим органом, и механизмы управления ими.
Являясь, по сути, энергетической основой ЗТМ, тяговый привод непосредственно обеспечивает её функционирование, т.е. эффективную разработку грунта. А поэтому функционирование тягового привода ЗТМ необходимо рассматривать в сфере процесса копания грунта, т.е. функционирования системы «ЗТМ – грунт», как этого требует системный подход [45] со всеми вытекающими из него принципами, согласно которым эффективность системы
– это нормированный к затратам ресурсов результат её действия на определённом интервале времени.
Так как тяговый привод непосредственно работает на готовый продукт функционирования ЗТМ (результат её действия) – разработанный грунт, то в соответствии с принципами системотехники в целевую функцию его функционирования кроме величины технической производительности ПТ.К t одновре-
менно должна входить и величина подачи (оперативного расхода) энергоносителя GT t , которые к тому же являются выходной и входной координатами
энергетического потока.
В качестве такой функции был предложен [39, 78] энергетический показатель процесса разработки грунта (2.189)
Э |
П |
t Ф G |
t , П |
t |
П |
t G |
t (м3/кг), |
|
T |
Т.К |
|
Т.К |
T |
|
а критерием эффективности процесса разработки грунта и процесса функционирования тягового привода принят его максимум
ЭП t max ,
характеризующий максимальное количество грунта, разработанного на единицу затраченного энергоносителя.
Энергетический показатель ЭП t является интегральным и включает в
себя все ныне известные в теории ЗТМ оценочные показатели и критерии эффективности:
|
NДВ t , NT.P t , T t NT.P t |
NДВ t , ПТ.К t max |
|
и |
|
|
GT t , gT t GT t |
NT.P t min, |
где T t |
– тяговый КПД; gT t – удельный расход энергоносителя), т.к. он |
|
выражается через единичные входную GT t и выходную ПТ.К t координаты
рабочего процесса ЗТМ и её энергетический поток, что подтверждает его системный характер.
218
Процесс копания грунта ЗТМ, а значит и процесс функционирования её тягового привода, являются управляемыми процессами. В качестве управляющих воздействий у современных ЗТМ могут быть использованы (рис. 3.10) воздействия на автоматический регулятор подачи топлива в ДВС uДВ , коробку
передач uКП |
трансмиссии и рабочее оборудование uPO t , т.е. вектор-функция |
|
управляющих воздействий представляет собой множество |
|
|
|
U uДВ ,uКП ,uРО t . |
(3.74) |
Как правило, воздействия uДВ и uКП являются дискретными, |
а воздей- |
|
ствие uPO t |
может быть как дискретным, так и непрерывным. Оперативным |
|
управляющим воздействием на процесс копания грунта ЗТМ является воз- |
||||||||||||||||||||
действие на рабочий орган |
uPO t |
|
– заглубление или выглубление его, что |
|||||||||||||||||
вызывает изменение необходимой силы тяги на рабочем органе ТР t через |
||||||||||||||||||||
глубину резания грунта hР t , ибо |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
hР t PK t TP t , |
|
|
|
|
|
|
|||||
где PK t |
– сила сопротивления грунта копанию. В этом случае uPO t hP t . |
|||||||||||||||||||
Так как глубина резания рабочего органа hР t |
|
оперативно формирует |
||||||||||||||||||
сопротивление грунта копанию |
PK t , являющееся внешним воздействием на |
|||||||||||||||||||
тяговый привод ЗТМ, то hР t является аргументом как целевой функции |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Э |
t f h |
t |
, |
|
|
|
|
|
(3.75) |
||
|
|
|
|
|
|
|
|
|
|
П |
|
P |
|
|
|
|
|
|
|
|
так и её непосредственных промежуточных функций |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
П |
Т.К |
t |
f h |
t и G t |
f h |
t , |
|
(3.76) |
|||||||
|
|
|
|
|
|
|
|
|
P |
|
T |
|
P |
|
|
|
|
|
||
а также следующих функций: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
P t f |
h |
|
t |
, T t |
f h t |
|
, |
t f h |
t , |
N |
T.P |
t f |
h t |
. (3.77) |
||||||
K |
P |
|
|
P |
|
|
|
P |
|
|
Д |
P |
|
|
|
|
P |
|
||
Итак, управление процессом функционирования тягового привода ЗТМ |
||||||||||||||||||||
должно строиться на синтезе и анализе целевых функций |
|
|
|
|||||||||||||||||
|
N |
T.P |
t f h |
t |
и Э t f h |
t |
ибо N |
T.P |
t Э t , |
(3.78) |
||||||||||
|
|
|
|
P |
|
|
|
П |
|
P |
|
|
|
|
П |
|
||||
которые и составят математическую основу управления им.
219

Исходными функциями являются: для NT.P hP TP hP Д hP - это TP hP
и Д hP ; а для ЭП hP ПТ.К hP GT hP - это ПТ.К hP и GТ hP , которые |
вместе с NТ.P hP являются компонентами энергетического потока ЗТМ. |
Режим NТ.P MAX обеспечивает машине максимальную производительность,
если рабочий орган полностью реализует эту мощность непосредственно на вырезание грунта из массива, т.к. техническая производительность ПТ.К опре-
деляется по объёму грунта VГР , вырезаемому в плотном теле. В реальности тяговая мощность на рабочем органе NТ.P и её составляющая сила тяги TP затрачиваются на преодоление общего сопротивления грунта копанию PK , которое включает в себя сопротивление вырезанию грунта из массива РP и сопротив-
ления, связанные с формированием вырезанного грунта в призму волочения и заполнением ею рабочего органа РПP , т.е.
PK PР PПР .
Кроме того режим NТ.P MAX не учитывает расход энергоносителя в процессе копания грунта. А критерий NТ.P MAX не является системным для процесса
функционирования системы «ЗТМ – грунт», т.е. процесса копания грунта, он только промежуточный.
Этих недостатков лишён процесс разработки грунта на режиме ЭП MAX
[44], позволяющий решить задачу энергосберегающего управления им.
В настоящее время задача энергосбережения в технологических процессах машин стала весьма актуальной, поэтому она должна решаться одновременно с задачей повышения производительности, т.е. она становится частью общей проблемы повышения эффективности работы машин, в том числе и землеройно-транспортных.
Оперативным управляющим воздействием на процесс копания грунта, а значит и процесс функционирования ЗТМ, принята глубина резания hP t рабочего органа, которая непосредственно формирует объём вырезанного в плотном теле грунта hP t VГР t , а значит и техническую производительность
ПТ.К t dtd VГР t ,
и одновременно формирует внешнее входное воздействие на тяговый привод через рабочий орган
hP t PK t TP t ,
220