

Учебное пособие 2165
.pdfОбщим в кинематике движителя и ГМКП является то, что в этих механизмах отсутствует жёсткая связь между ведомым и ведущим звеньями, допускающая их относительное проскальзывание (пробуксовывание). При увеличении нагрузки на выходном звене величина проскальзывания (буксования) увеличивается, т.е. работа этих механизмов имеет аналогию с фрикционными передачами. Поэтому в этом смысле движитель и ГМКП можно рассматривать как передаточные механизмы «фрикционного типа». В ГМКП элементами фрикционной передачи обладает гидротрансформатор (ГТ).
Задача данного исследования заключается в изучении влияния связи «фрикционного типа» между ведомым и ведущим звеньями движителя [33] и ГМКП [34] на их тягово-энергетические показатели.
2.4.2.1. Функционирование колёсного движителя в передаточном механизме тягового привода ЗТМ
Расчётная модель колёсного движителя представлена на рис. 2.28. При взаимодействии ведущего колеса 1 и опорной поверхностью 2 вращательное движение его с угловой скоростью ωК преобразуется в поступательное движе-
ние оси колеса с рамой 3 со скоростью Д , а подводимый к нему крутящий момент M К преобразуется в силу тяги TК . Сила тяги TК представляет собой касательную реакцию опорной поверхности и передаётся на ось колеса с добавлением реактивного момента MТК = ТК rС , где rC – силовой радиус колеса.
Таким образом, при равномерном движении ведущего колеса и статическом приложении к нему внешних нагрузок на колесо действуют следующие силы и
моменты; |
FК – тяговая нагрузка и GК |
– вертикальная нагрузка на ось колеса; |
|||||||||
RК – нормальная реакция опорной поверхности; TК – |
касательная реакция |
||||||||||
опорной поверхности и она же силы тяги движителя; M К |
– активный крутящий |
||||||||||
момент, |
подводимый |
к движителю от силовой установки; |
M |
ТК |
и |
M |
f |
– |
|||
|
|
|
|
|
|
|
|
|
|
||
реактивные моменты, |
обусловленные действием реакций TК и |
RК . |
При этом |
||||||||
RК GК ; |
TК FК ; Pf RК f = GК f ; MТК |
TК rС ; M f Pf rС ; |
|
|
|
|
|
|
|||
|
|
MК = MТ |
M f |
TК Pf rС , |
|
|
|
|
(2.108) |
||
|
|
|
К |
|
|
|
|
|
|
|
|
где Pf – сила сопротивления качения колеса; f – коэффициент сопротивления
качению колеса.
Расчётная модель (рис. 2.28) применима и для многоколёсного движителя с блокированным приводом (автогрейдеры, базовые тягачи) путём замены его одним условным пневмоколесом с обобщёнными параметрами. Расчётные
111

зависимости (2.108) справедливы и для гусеничного движителя при замене rС на rК – радиус ведущего колеса или звёздочки движителя.
Рис. 2.28. Схема сил и моментов, действующих на колёсный движитель: 1 – ведущее звено (колесо с пневмошинной); 2 – опорная поверхность; 3 – ведомое звено (тяговая рама с осью колеса)
Скорость поступательного движения оси колеса с рамой |
|
Д = К rС 1 , |
(2.109) |
где δ – коэффициент буксования движителя.
Рассмотрим работу движителя с идеализированной линейной моделью
буксования |
|
ТК , |
(2.110) |
где – параметр характеристики буксования, учитывающий сцепные качества движителя. При δ = 1,0 Д = 0, и тогда сила тяги движителя по сцеплению с опорной поверхностью будет равна
ТК 1 / , |
(2.111) |
Тягово-энергетические показатели движителя: |
|
Подводимая к движителю мощность |
|
NК=МК К= ТК Рf К rС ; |
(2.112) |
112
Тяговая мощность движителя |
|
NT=ТК Д= ТК ТК2 К rС ; |
(2.113) |
Коэффициент полезного действия (КПД) движителя |
|
К=NТ /NК= ТК ТК2 ТК Рf . |
(2.114) |
Через тяговую раму (раму ЗТМ) сила тяги движителя TК |
передаётся на |
рабочий орган в виде силы тяги TР , которая в общем случае движения машины |
|
TР TК , а тяговая мощность на рабочем органе будет равна NТ.Р ТР υД . Рассмотрим общий случай работы движителя, когда f = varia и ωК = varia:
f |
= f0 1+ ТК ; К К0 MK , |
|
(2.115) |
||
где f0 – коэффициент |
сопротивления |
качению |
колеса при |
ТК 0 ; |
К0 – |
угловая скорость вращения колеса при |
MK 0 ; |
и – параметры соответ- |
|||
ствующих характеристик. Предполагается, что вертикальная нагрузка на ось
колеса GК остаётся постоянной, |
в противном случае необходимо будет перейти |
||||||||||||||||||||||||||
к относительной силе тяги TК / GК , |
учитывающей изменение не только ТК , |
||||||||||||||||||||||||||
но и GК , т.е. в этом случае |
f = f0 1 + . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Выражения (2.112), (2.113), (2.114) с учётом (2.115) после преобразований |
|||||||||||||||||||||||||||
примут следующий вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
NК= К0 GК f0rC GК f0rC К0 2 GК f0rC 1 + GК f0 rCТК |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 + G |
f |
0 |
2 r |
2Т |
2 |
; |
|
|
|
|
|
|
(2.116) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
К |
|
|
C |
|
К |
|
|
|
|
|
|
|
|
||
N |
Т |
= |
G f r |
r Т |
|
|
G f |
0 |
1 r |
r Т |
|
||||||||||||||||
|
К0 |
К |
0 |
C C К |
|
|
|
|
|
|
|
|
|
К |
|
|
|
C |
К0 |
C К |
(2.117) |
||||||
|
|
|
|
|
|
|
|
|
1+ G |
|
f |
|
r |
2Т |
3 |
; |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
К |
|
C |
|
К |
|
|
|
|
|
|
|
|
|||
|
|
|
= |
Т |
К |
Т 2 |
|
/ |
G f |
0 |
|
1 + G f |
0 |
Т |
К |
|
|
(2.118) |
|||||||||
|
|
|
К |
|
|
|
К |
|
|
К |
|
|
|
|
|
К |
|
|
. |
|
|||||||
Итак, работа движителя будет определяться величиной тяговой нагрузки |
|||||||||||||||||||||||||||
ТК и параметрами: |
– |
характеристики буксования, – |
характеристики |
||||||||||||||||||||||||
113

коэффициента сопротивления качению, – характеристики угловой скорости
вращения ведущего звена.
Характерными режимами работы движителя ЗТМ являются режим максимальной тяговой мощности NТ.max и режим максимального КПД ηК.max. Наиболее полно эти режимы были проанализированы в работах [154, 155], однако полученные результаты представлены в них не в конечном аналитическом виде, а промежуточными графическими зависимостями, построенными по результатам численного моделирования, что вызывает определённые трудности при решении задач оптимизации показателей этих режимов. Кроме того, что главное, эти режимы были рассмотрены вне взаимосвязи друг с другом. Максимальные
значения показателей NК.max, NТ.max, ηК.max |
соответствуют точкам экстремума |
выпуклых функций NК NК ТК , NТ NТ |
ТК , К К ТК . В этом случае |
N |
К |
N |
К.max |
при |
Т |
К |
= Т |
К. NТ |
; |
|
К.max |
при Т |
К |
= Т |
|
. |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
К |
|
|
|
|
|
|
К. К |
|
|
|
|
|
|||||||||||||
|
|
|
Из |
NК 0 ТК.NК |
, из |
NТ 0 ТК.NТ , из |
К 0 ТК. К |
|||||||||||||||||||||||||||
|
|
|
|
|
ТК |
|
|
|
|
|
|
|
|
|
|
|
ТК |
|
|
|
|
|
|
|
|
|
ТК |
|
|
|
|
|
||
|
|
Из выражений (2.119) и (2.116), (2.117), (2.118) получим |
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
Т |
К.NК |
|
|
|
2 G f r |
|
/ 2 |
1+ G f |
0 |
r |
; |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
К0 |
|
|
|
К |
0 |
C |
|
|
|
|
|
|
К |
C |
|
|
||||||||
|
|
3 |
|
1+ G f |
0 |
r Т |
2 |
2 |
|
1 |
|
G f |
0 |
r |
|
Т |
К.NТ |
|||||||||||||||||
|
|
|
|
|
|
|
К |
|
|
|
C К.NТ |
|
|
|
|
|
|
|
|
К |
C |
|
К0 |
|
||||||||||
К0 GК f0rC 0;
1+ GК f0 ТК2. К 2 GК f0ТК. К GК f0 0.
. (2.119)
(2.120)
(2.121)
(2.122)
Значения сил тяги |
Т |
К.NТ |
|
и Т |
|
определим соответственно из уравнений (2.121) |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
К. К |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
и (2.122): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Т |
|
1 G f |
0 |
r |
|
|
|
|
|
|
|
1 G f |
|
r |
|
2 |
|
|||||||||||||||||||||||
|
К.NТ |
|
|
|
|
|
|
|
|
|
|
К |
|
C |
|
К0 |
|
|
|
|
|
|
|
|
К |
0 C |
К0 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/ 3 |
|
1 + G f |
|
r |
|
|
|
|
||||||||||||
|
|
3 |
|
1 + G |
|
f |
|
|
r |
|
|
|
|
G |
|
f r |
|
|
|
; |
|
|
(2.123) |
|||||||||||||||||
|
|
|
|
|
|
К |
|
|
0 |
|
C |
|
|
К0 |
К |
|
0 C |
|
|
|
|
|
|
|
К |
0 |
C |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/ |
|
|
|
|
|
|||||||||||||||||||
|
Т |
|
|
G f |
0 |
2 |
1+ G f |
0 |
G f |
0 |
G f |
1+ G f |
0 |
. |
(2.124) |
|||||||||||||||||||||||||
|
|
К. К |
|
К |
|
|
|
|
|
|
|
|
|
К |
|
|
|
К |
|
|
|
К |
0 |
|
|
|
К |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При 0 Pf |
Pf 0 |
|
GК f0 и 0 |
К К0 : |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
из выражения (2.120) |
|
ТК.N |
Т |
= |
|
∞, |
т.е. функция |
NК NК ТК |
не имеет |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
экстремума;
114

из выражения (2.123) |
имеем |
неопределённость |
вида |
ТК.N |
= |
0/0, |
а |
из |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
выражения (2.121) получим Т |
К.NТ |
1 / 2 |
; |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||
из выражения (2.124) ТК. |
|
|
Рf 0 |
1 |
|
1 . |
|
|
|
|
|
|
||||
К |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
Рf 0 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При = 0: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
выражение (2.120) для |
Т |
|
остаётся без изменения, так как параметр |
|
||||||||||||
|
|
|
К.NК |
|
|
|
|
|
|
|
|
|
|
|
|
|
не влияет на показатель NК ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
из выражения (2.123) |
имеем |
неопределённость |
вида |
ТК.N |
= |
0/0, |
а |
из |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
выражения (2.121) получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
G f r |
|
/ 2 |
|
r |
1+ G f |
0 |
, |
|
|
|
||||||||
|
|
|
|
|
|
К.NТ |
К0 |
К |
0 C |
|
|
C |
|
|
|
К |
|
|
|
|
||||||
и при |
|
= 0 |
Т |
|
= ∞, |
т.е. |
функция |
|
N |
Т |
N |
Т |
Т |
К |
|
не имеет экстремума; из |
||||||||||
|
|
|
|
К.NТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
выражения (2.124) имеем неопределённость вида |
Т |
|
|
= 0/0, из выражения (2.122) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К. К |
|
|
|
|
|
|
||
Т |
не определяется, и при |
= 0 уравнение (2.122) не выполняется, из выражения |
||||||||||||||||||||||||
|
К. К |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.118) К / ТК = 0 при ТК. К = ∞, т.е. функция К К ТК |
|
не имеет экстремума. |
||||||||||||||||||||||||
|
Итак, функция NК NК ТК на параметр |
|
|
не реагирует, а при = 0 не |
||||||||||||||||||||||
имеет экстремума; функция |
NТ NТ ТК при |
|
|
= |
0 и = 0 не имеет экстре- |
|||||||||||||||||||||
мума; функция К К ТК |
на параметр не реагирует, а при |
= 0 не имеет |
||||||||||||||||||||||||
экстремума. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
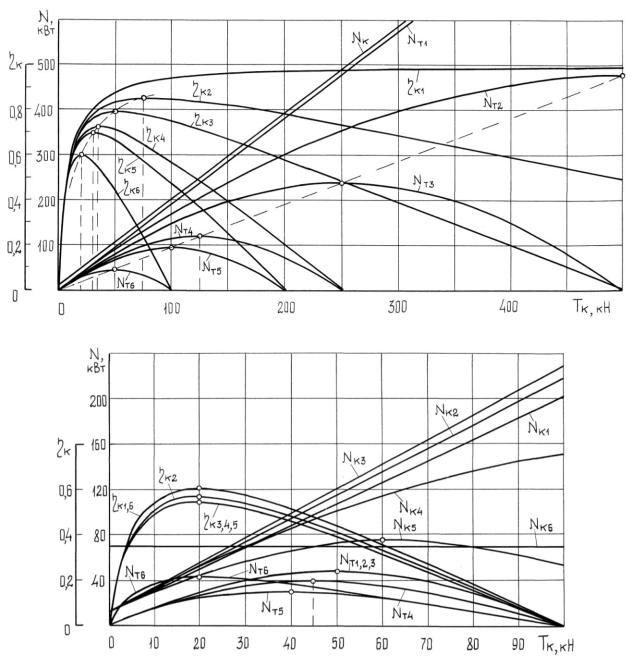
|
Более |
подробно |
влияние |
параметров |
|
|
, |
, |
|
|
|
на |
функции |
|||||||||||||
NК NК ТК , NТ NТ ТК , |
К К ТК |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
проанализируем по графикам, пред- |
|||||||||||||||||||||||||
ставленным на рис. 2.29 и |
построенным по исходным данным автогрейдера |
|||||||||||||||||||||||||
ДЗ-146: G |
= 91,78 кН, r |
= 0,632 м, |
f |
0 |
= 0,07, |
|
|
= 3 с-1. Для характеристик на |
||||||||||||||||||
|
|
К |
|
|
C |
|
|
|
|
|
|
|
|
|
К0 |
|
|
|
|
|
|
|
|
|||
рис. 2.29, а: |
= 0, |
= 0, |
= varia. Для характеристик на рис. 2.29,б: |
= 0,01 |
||||||||||||||||||||||
кН-1 = const; = 0 и = varia для кривых 1-3, = 0,0218 кН-1= =const и |
= |
varia для кривых 3-5, = 0 и NК = 70 кВт = const для кривых 6. |
|
115
а)
б)
Рис. 2.29. Характеристики движителя землеройно-транспортной машины с
линейной моделью буксования: а – при = 0, = 0 и |
= varia; 1 – = 0; |
|
2 – = 0,001 кН-1; 3 – = 0,002 кН-1; 4 – = 0,004 кН-1; 5 |
– |
= 0,005 кН-1; |
6 – = 0,01 кН-1; б – при = 0,01 кН-1 = const; 1 – |
= 0, |
= 0; |
2 – = 0,0136кН-1, = 0; 3 – = 0,0218 кН-1, = 0; 4 – = 0,0218 кН-1,= 0,013 (кН·м·с)-1; 5 – = 0,0218 кН-1, = 0,03 (кН·м·с)-1;
6 – = 0, NК = 70 кВт = const
116
|
|
|
Выводы. |
1. При |
= |
0 |
и |
|
|
= 0 с увеличением ТК |
характеристики |
|||||||||||||||||||||||||
NК NК ТК |
и |
|
NТ NТ ТК |
интенсивно |
возрастают, |
|
а |
характеристика |
||||||||||||||||||||||||||||
К К ТК асимптотически приближается к значению |
|
К = |
|
1. При |
0 |
|||||||||||||||||||||||||||||||
(имеет |
место |
буксование |
движителя) |
у |
характеристик |
|
NТ NТ ТК |
и |
||||||||||||||||||||||||||||
К К ТК появляется экстремум. |
При этом |
|
характеристика |
NТ NТ ТК |
||||||||||||||||||||||||||||||||
располагается симметрично относительно координаты |
Т |
К |
, |
и |
Т |
|
0,5Т |
К. |
, а |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К.NТ |
|
|
|||
характеристика |
|
|
Т |
К |
|
асимметрична, и Т |
|
0,5Т |
К. |
. С увеличением |
||||||||||||||||||||||||||
|
|
|
|
|
|
К |
|
|
К |
|
|
|
|
|
|
|
|
|
|
К. Т |
|
|
|
|
|
|
|
|
|
|
|
|||||
уменьшаются значения NТ.max и |
К.max , а также значения ТК. , |
ТК.NТ , ТК. К , при |
||||||||||||||||||||||||||||||||||
этом соотношение |
Т |
|
|
/ Т |
|
увеличивается, но Т |
|
|
Т |
|
|
. |
|
Так, при |
|
= |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
К. К |
|
|
К.NТ |
|
|
|
|
|
|
|
|
К. К |
|
|
К.NТ |
|
|
|
|
|
|||||||
0,001 кН-1 ТК. К |
/ ТК.NТ = 0,15, а при |
|
|
= 0,01 кН-1 |
|
ТК. К |
/ ТК.NТ = 0,4. И только при |
|||||||||||||||||||||||||||||
N |
К |
= const Т |
К. К |
/ Т |
К.NТ |
|
= 1 (рис. 2.29, б, кривые 6). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
2. При |
> 0 = const и = 0 |
с увеличением |
|
|
значения К.max умень- |
||||||||||||||||||||||||||||
шаются, а значения |
N |
Т.max |
, |
Т |
К.NТ |
и |
Т |
|
остаются постоянными. |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К. К |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
3. При |
|
> 0 = const и > 0 |
= const с увеличением значения NТ.max и |
||||||||||||||||||||||||||||||
Т |
|
|
уменьшаются, а значения |
|
|
и Т |
остаются постоянными. |
|
|
|
||||||||||||||||||||||||||
|
К.NТ |
|
|
|
|
|
|
|
|
|
|
|
|
К.max |
|
К. К |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
На |
рис. |
2.30 |
представлена |
экспериментальная |
тяговая |
характеристика |
|||||||||||||||||||||||||||
колёсного движителя лёгкого класса ДЗ-40А на первой передаче и суглинистом грунте (СУД = 7…8, W = 23 %) [13], а на рис. 2.31 – расчётная тяговая характеристика гусеничного движителя бульдозерно-рыхлительного агрегата (БРА) ДЗ-158 УХЛ (Т-25.01 БР-2) на первой передаче и типичном грунте [25]. Пунктиром обозначены характеристики для линейных моделей δ (2.110), f и К
(2.115) с исходными данными: ДЗ-40А - GК = 66,738 кН, rC |
= 0,54 м, f0 = 0,079, |
||||||||||||
= 0, |
|
= 1,27 с-1, |
|
= 0,00465 (кН·м·с)-1, |
= 0,006 кН-1; ДЗ-158 УХЛ - G = |
||||||||
|
К0 |
|
|
|
|
|
|
|
|
|
|
К |
|
439,06 |
кН, r |
= 0,5025 м, f |
0 |
= 0,0515, = 0, |
= 2,345 с-1, |
|
|
= 0,0075 (кН·м·с)- |
|||||
|
|
К |
|
|
|
|
К0 |
|
|
|
|
||
1, = 0,00076 кН-1. |
|
|
|
|
|
|
|
|
|
|
|||
Анализ |
характеристик MК MК ТК |
и |
К |
К ТК подтверждает |
|||||||||
правомерность линейных моделей (2.115) К |
К ТК |
и f |
f ТК при = 0. |
||||||||||
117

Рис. 2.30. Экспериментальная тяговая характеристика колёсного движителя автогрейдера лёгкого класса ДЗ-40А на первой передаче и суглинистом грунте
Рис. 2.31. Расчётная тяговая характеристика гусеничного движителя бульдозерно-рыхлительного агрегата (БРА) ДЗ-158 УХЛ (Т-25.01 БР-2) на первой передаче и типичном грунте
118
Для дизельного двигателя, работающего на регуляторной ветви внешней характеристики, и механической коробки передач (МКП) характеристика
К К ТК близка к линейной (рис. 2.30). Для дизельного двигателя с гидромеханической коробкой передач (ГМКП) характеристика К К ТК в пер-
вом приближении с достаточной степенью точности может быть аппроксимирована линейной зависимостью (рис. 2.31). В диапазоне коэффициента буксо-
вания δ = 0…0,23 реальные характеристики Д , NК , NТ, К f ТК (рис. 2.30, 2.31) достаточно хорошо совпадают с расчётными для линейной модели буксования (2.110). При δ > 0,25 и незначительном увеличении ТК буксование движителя в реальных условиях работы ЗТМ резко возрастает, а скорость движения Д , тяговая мощность NТ и КПД К резко уменьшаются. Однако,
как видно из графиков на рис. 2.30 и 2.31, реальные значения К.max и NК.max находятся в пределах начального, близкого к линейному участка характерис-
тики буксования ТК , и для их определения, а также для определения
значений силы тяги движителя Т |
и Т |
могут быть использованы фор- |
|
К.NТ |
К. К |
мулы (2.116) – (2.118), (2.123), (2.124), полученные на основе линейной модели буксования движителя (2.110). При этом для колёсного движителя автогрейдера
ДЗ-40А |
= 0,006 кН-1, а для гусеничного движителя трактора Т-25.01 |
|
бульдозерно-рыхлительного агрегата ДЗ-158 УХЛ |
= 0,0007 кН-1, что |
|
подчеркивает его более высокие сцепные качества. Выводы, сделанные по тягово-энергетическим показателям движителя ЗТМ с линейной моделью буксования (рис. 2.29), справедливы и для реальных моделей в диапазоне коэффициента буксования δ = 0…0,23.
2.4.2.2.Функционирование гидромеханической коробки передач
впередаточном механизме тягового привода ЗТМ
Гидромеханическая коробка передач (ГМКП), представляющая собой единый блок из гидродинамической передачи (гидротрансформатора – ГТ) и механической коробки передач (МКП).
Расчётная модель ГМКП представлена на рис. 2.32, где индексами «н» и «т» отмечены показатели на входе (на насосном колесе) и на выходе (на турбинном колесе) ГТ, а индексами «1» и «КП» отмечены показатели на входе МКП и на выходе МКП – ГМКП. Входной вал ГМКП соединяется с насосным колесом ГТ. Выходной вал ГТ, на котором установлено турбинное колесо, соединяется с входным валом МКП. Таким образом, при блокированном ГТ ГМКП работает в режиме МКП.
Основными параметрами ГТ являются кинематическое передаточное отношение iГТ Т Н и коэффициент трансформации KГТ ΜТ ΜН , а МКП
119

– передаточное отношение iКП 1 КП const и крутящий момент Μ f внутреннего сопротивления вращения МКП, приведённый к входному валу.
Рис. 2.32. Расчётная модель гидромеханической коробки передач: 1 – гидротрансформатор ГТ (р – реакторы);
2 – механическая коробка передач МКП
В соответствии со схемой на рис. 2.32 угловые скорости вращения
Т 1 , крутящие моменты ΜТ Μ1 и мощности NТ N1 . Показатели работы гидротрансформатора:
мощность на насосном колесе ΝН МН Н ; мощность на турбинном колесе ΝТ МТ Т ;
КПД ГТ ГТ = ΝТ ΝН КГТiГТ .
Выходную характеристику ГТ примем в виде [25, 163]:
|
|
|
|
|
|
Т |
М |
Т |
, |
|
|
|
|
|
|
(2.125) |
||||
|
|
|
|
Т |
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
– параметр характеристики |
|
|
М |
Т |
. При |
М |
Т |
= 0 |
|
|
. |
||||||||
|
Т |
|
|
|
Т |
|
Т |
|
|
|
|
|
|
Т |
Т0 |
|
Н |
|||
Коэффициент буксования ГТ будет равен |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
ГТ Н Т / Н 1 iГТ , |
|
|
|
|
|
(2.126) |
||||||||||
|
При |
= 0 |
|
, т.е. |
ГТ |
заблокирован. |
При |
|
Т |
|
0 и |
М |
Т |
= |
||||||
|
|
Т |
Т |
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
=0… Н / Т коэффициент буксования ГТ изменяется в диапазоне δ = 0…1. Для МКП примем следующую модель распределения крутящих моментов:
120