


вающий генерацию сигнала с широтно-импульсной модуляцией, подключается через транзистор к первичной катушке трансформатора. Путем управления скважностью ШИМ-сигнала происходит управление выходным напряжением трансформатора. Катод счетчика Гейгера также через транзистор подключен к выводу микроконтроллера. При возникновении импульса на данном выводе генерируется прерывание и микроконтроллер производит подсчет числа радиоактивных частиц, прошедших через счетчик. При изменении величины напряжения на выводах счетчика Гейгера скважность ШИМ-сигнала корректируется.
В качестве счетчика Гейгера используется модель J305, внешний вид которой изображен на рис. 2.15. Данный вид счетчиков позволяет регистрировать γ-излучение, а также жесткое β излучение.
Рис. 2.15. Внешний вид счетчика Гейгера
Таким образом, роботизированное устройство имеет возможность измерения радиоактивного фона. Представлена схема модуля, описано ее функционирование, а также процесс генерирования высокого напряжения для питания счетчика Гейгера. Программная реализация измерений описана в последующих разделах.
2.2. Взаимодействие комплектующих
Все модули и датчики, описанные ранее, осуществляют взаимодействие с микроконтроллером либо посредством специализированных интерфейсов передачи данных, либо при помощи логических сигналов. Структурная схема роботизированного устройства представлена на рис. 2.16.
32
Датчикглобального |
|
|
Цифровой компас |
|
Датчиктемпературы |
|
Датчикрасстояния |
||||||
местоположения |
|
|
(магнитометр) |
|
ивлажностивоздуха |
|
|||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Микроконтроллер |
|
Драйвер |
|
|
|
|
|
электродвигателей |
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Радиомодуль |
|
Левая пара |
|
Праваяпара |
ближнейсвязи |
|
|
||
|
электродвигателей |
|
электродвигателей |
|
|
|
|
||
|
|
|
|
|
Радиомодуль |
|
|
|
|
|
|
|
||
дальнейсвязи |
|
|
|
|
|
|
|
|
|
Рис. 2.16. Структурная схема роботизированного устройства
Центральным узлом всей системы является микроконтроллер. Он обеспечивает считывание показаний датчиков, управление передвижением роботизированного устройства, а также взаимодействие с оператором. Как уже было сказано ранее, используется специализированная отладочная плата с микроконтроллером на борту. На данной плате установлены два разъема, по 64 контакта каждый, для подключения внешних устройств. Однако, контакты разъемов напрямую соединены с соответствующими выводами микроконтроллера, что может привести к повреждению микроконтроллера либо какого-либо из модулей при неправильном подключении. Так как выводов много, то ошибиться достаточно легко.
Для того, чтобы исключить возможность неправильного подключения внешних устройств, изготовлена специализированная плата сопряжения. Внешний вид данной платы изображен на рис. 2.17. Принципиальная схема платы приведена в прил. 9.
33

Рис. 2.17. Внешний вид платы сопряжения
Плата сопряжения не содержит никаких программируемых устройств или датчиков. На плате установлены разъемы для соединения с отладочной платы микроконтроллера с модулями и датчиками. Также плата сопряжения подключается к аккумуляторной батарее и обеспечивает питанием все системы роботизированного устройства за исключением электродвигателей и счетчика Гейгера. При этом для каждого подключаемого устройства имеется свой разъем. Каждый разъем имеет шесть контактов. Четыре из них используются для питания внешних устройств: напряжение +5 В, +3.3 В, а также два контакта, соединенных с общей шиной. Два оставшихся контакта используются для интерфейсов передачи данных, таких как UART или I2C.
Таким образом, описана структура роботизированного устройства, взаимодействие датчиков и модулей с микроконтроллером, а также показана плата сопряжения, предотвращающая выход из строя роботизированного устройства из-за неправильного подключения составных устройств между собой.
2.3. Сопряжение уровней логических сигналов
Описанные в предыдущих разделах датчики и модули в большинстве своем используют в цифровых интерфейсах обмена данными уровни напряжения 0 В и +5 В в качестве логического «0» и логической «1» соответственно. Микроконтроллер же, в свою очередь, осуществляет работу с уровнями напряжений 0 В и +3.3 В, за некоторыми исключениями.
Также микроконтроллер имеет набор выводов, «толерантных» к
34
напряжению 5 В, однако их число ограничено. Таким образом, соединение выводов микроконтроллера с выводами датчиков и модулей напрямую без соответствующих цепей согласования может привести к выходу микроконтроллера из строя.
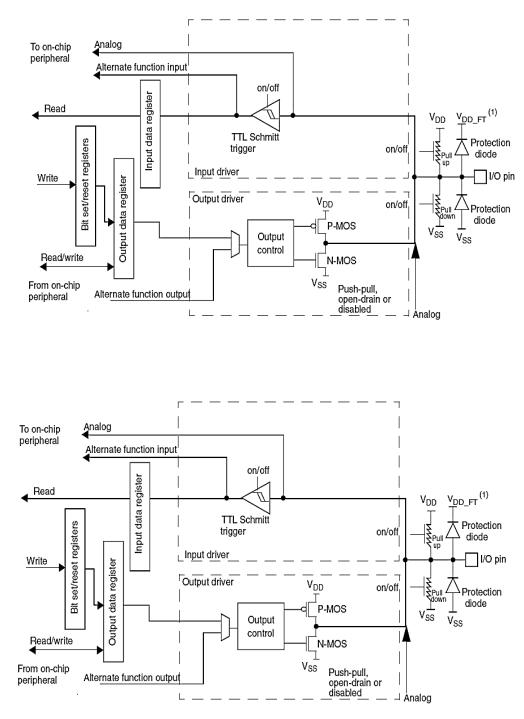
На рис. 2.18 изображена упрощенная схема устройства портов ввода/вывода микроконтроллера не поддерживающих работу с напряжением +5 В, а на рис. 2.19 изображена схема портов, «толерантных» к 5 В.
Рис. 2.18. Схема устройства портов ввода/вывода
Рис. 2.19. Схема устройств портов ввода/вывода, «толерантных» к 5 В
35
Все порты ввода/вывода микроконтроллера имеют одинаковое устройство. Непосредственно на каждом цифровом выводе установлены диоды, которые защищают входы микроконтроллера от перенапряжения. Данные диоды имеют достаточно высокую надежность, однако максимальный протекающий через них ток ограничен 10 мА. Таким образом, прямое подключение к выводам микроконтроллера устройств с логическими уровнями выше 3.3 В может привести к выгоранию защитных диодов и, тем самым, неработоспособности роботизированного устройства.
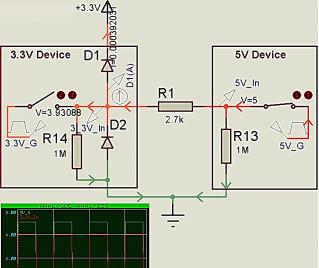
Одним из возможных решений данной проблемы является установка между выводом микроконтроллера и внешним подключаемым устройством токоограничивающего резистора (рис. 2.20).
Номинал токоограничивающего резистора рассчитывается по следующей формуле
R = |
U |
= |
(U 5 −U 3.3 −U Д ) |
= |
5 |
−3.3 −0.6 |
= |
1.1 |
, |
I |
I |
|
I |
I |
|||||
|
|
|
|
|
|
где I – максимальный ток защитных диодов.
Достоинством данного метода является простота реализации за счет использования всего одного элемента. Недостатком является наличие инжекции дополнительного тока в источник питания 3.3 В, что может привести к флуктуациям напряжения питания.
Другим перспективным вариантом решения проблемы согласования логических уровней является использование оптической изоляции между устройствами. Преимуществом является возможность полной гальванической развязки. Однако данный вариант не рассматривается в связи с тем, что оптоэлектронные компоненты имеют довольно большие размеры.
Рис. 2.20. Согласование логических уровней с помощью токоограничивающего резистора
36
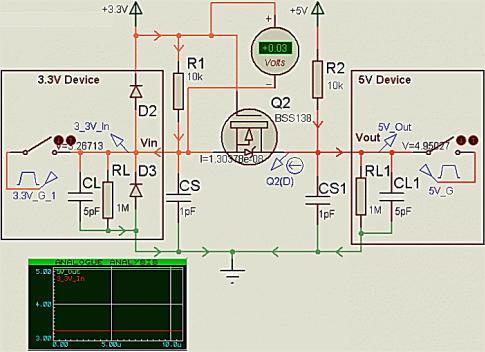
Наиболее удачного результата можно добиться с использованием для согласования логических уровней последовательно включенного МОПтранзистора (рис. 2.21).
Рассмотрим более подробно работу схемы на рис. 2.21. В исходном с о- стоянии линия связи подтянута со стороны микроконтроллера резистором R1 к +3.3 В, а со стороны внешнего устройства резистором R2 к +5 В. Транзистор в данном случае закрыт, так как затвор и исток имеют одинаковый потенциал. На обоих концах линии связи установлена логическая «1» с соответствующим уровнем напряжения.
Когда микроконтроллер устанавливает на выводе состояние логического «0» исток транзистора оказывается под низким потенциалом. Так как на затвор в это время подано напряжение +3.3 В, транзистор открывается, подтягивая вход внешнего устройства к низкому уровню.
Рис. 2.21. Согласование логических уровней с помощью последовательно включенного МОП-транзистора
В случае установки логического «0» на выходе внешнего устройства через диодный переход исток-подложка напряжение на истоке снижается до тех пор, пока напряжение на затворе не перейдет пороговый уровень. После этого транзистор открывается, и вход микроконтроллера подтягивается к низкому уровню.
К достоинствам данного варианта можно отнести возможность использования двунаправленной передачи данных, что актуально в данной работе за счет использования шины I2C. Также данная схема может быть использована
37