


Для соединения отладочной платы с модулями и датчиками роботизированного устройства используется дополнительная плата – плата сопряжения. Подробно функции и внешний вид платы описаны далее.
Таким образом, произведен анализ существующих моделей микроконтроллеров, которые могут быть применены при разработке роботизированного устройства. В качестве центрального вычислительного устройства выбран микроконтроллер STM32F407ZGT6, описаны его параметры и характеристики.
2.1.2.Шасси и электропривод
Вкачестве шасси для роботизированного устройства применена колесная платформа с четырьмя коллекторными электродвигателями постоянного тока.
Электродвигатели в роботизированном устройстве объединены попарно, что снижает количество каналов управления передвижением. Первый канал управляет скоростью вращения одной пары электродвигателей, а второй – другой пары. Кроме скорости необходимо управлять еще и направлением вращения электродвигателей. В последующих разделах будет показано, как можно в программе микроконтроллера использовать для управления передвижением роботизированного устройства всего два канала. Для движения вперед либо назад все электродвигатели должны осуществлять вращение в одну сторону. Для плавного поворота одна из пар электродвигателей замедляет вращение. В случае быстрого разворота на месте одна из пар электродвигателей осуществляет реверсивное вращение относительно другой. Внешний вид электродвигателей изображен на рис. 2.5. Конструктивно электродвигатели с редукторами объединены, что уменьшает стоимость и габариты устройства.
Рис. 2.5. Внешний вид электродвигателей роботизированного устройства [1]
Для питания электродвигателей необходимо использовать источник питания с напряжением не более 9 вольт. Максимальный ток, который может обеспечить источник питания, должен составлять более 1,5 ампер. В роботизированном устройстве таким источником является сборка из ячеек литийполимерных аккумуляторов, который одновременно осуществляет питание
18
электродвигателей и управляющей электроники, в том числе и микроконтроллера. Роботизированное устройство не имеет возможности зарядки аккумуляторов, поэтому последние являются съемными. Чтобы уменьшить помехи по питанию от электродвигателей, микроконтроллер подключен через вторичный источник питания в виде стабилизатора напряжения.
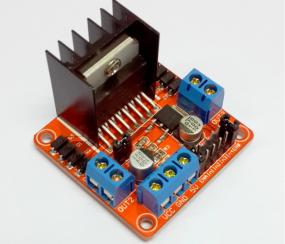
Микроконтроллер не в состоянии обеспечить на своих выводах требуемые для электродвигателей напряжение и ток. Для управления величиной и полярностью подаваемого на электродвигатели напряжения в роботизированном устройстве используется специализированный модуль – драйвер электродвигателей. Внешний вид драйвера изображен на рис. 2.6.
Рис. 2.6. Внешний вид драйвера электродвигателей [6]
Конструктивно драйвер представляет собой H-мост из полевых транзисторов, построенный на базе микросхемы L298N. Номинальный рабочий ток драйвера составляет 2 А, пиковый 3 А. На корпусе имеется радиатор для отвода тепла. Дополнительно драйвер имеет вывод 5 В для питания внешних устройств (в роботизированном устройстве данный вывод не используется). Для управления электродвигателями драйвер имеет шесть выводов, на которые необходимо подавать сигналы от микроконтроллера: In1 – In4, EnA, EnB. Выводы Out1 и Out2 являются выходными и служат для подключения левой пары электродвигателей. Аналогично к выводам Out3 и Out4 подключается правая пара электродвигателей. Принципиальная схема драйвера приведена в прил. 2.
При использовании драйвера на двигатели поступает напряжение, отличное от того, что подается на входы драйвера. Это связано с падением напряжения в транзисторах Н-моста. Оно составляет около двух вольт. Это необходимо учитывать при выборе аккумуляторной батареи.
Логические уровни на выводах In1 и In2 используется драйвером для переключения полярности напряжения, подаваемого на левую пару электродвигателей (выводы Out1 и Out2). Аналогично In3 и In4 позволяют переключать полярность правой пары электродвигателей (Out3 и Out4). Полярность напряже-
19
ния влияет на направление вращения электродвигателей. В табл. 2.5 показаны комбинации сигналов управления направлением вращения. Прочерк в таблице означает любой уровень напряжения, не выходящий за пределы эксплуатационных параметров микросхемы драйвера, 0 – уровень логического нуля, 1 – уровень логической единицы.
Таблица 2.5
Управление направлением вращения электродвигателей
In1, В |
In2, В |
In3, В |
In4, В |
Вращение электродвигателей |
0 |
0 |
0 |
0 |
Нет вращения |
3.3 |
3.3 |
3.3 |
3.3 |
Нет вращения |
- |
- |
0 |
3.3 |
Правая пара по часовой стрелке |
0 |
3.3 |
- |
- |
Левая пара по часовой стрелке |
- |
- |
3.3 |
0 |
Правая пара против часовой стрелки |
3.3 |
0 |
- |
- |
Левая пара против часовой стрелки |
Логические уровни на выводах EnA и EnB управляют подключением электродвигателей к источнику питания. Так, при нулевом напряжении на указанных выводах полностью отключаются цепи питания соответствующей пары электродвигателей и двигатели не смогут осуществлять вращение вне зависимости от текущего состояния In1 – In4.
При описанном способе управления электродвигателями имеется возможность либо остановить работу одной из пар электродвигателей, либо запустить их для вращения в заданном направлении. Замедлить скорость вращения возможно только под действием внешней нагрузки. Чтобы иметь возможность управлять скоростью вращения, необходимо на выводы EnA и EnB подать прямоугольный сигнал с широтно-импульсной модуляцией. Скважность сигнала прямо пропорциональна скорости вращения и крутящему моменту.
Таким образом, разработана колесная платформа для передвижения роботизированного устройства. Описаны устройство платформы, принципы управления передвижением, а также метод плавного изменения скорости вращения электродвигателей привода колес.
2.1.3. Радиомодуль
Управление и обмен данными с роботизированным устройством должен осуществляться по радиоканалу. Для этого предусмотрена возможность подключения к управляющему микроконтроллеру двух радиомодулей (приемопередатчиков), один из которых позволяет обеспечить обмен данными на близком расстоянии (порядка 10 метров), а другой зарезервирован для передачи данных на более высокие расстояния (сотни метров, зависит от характеристик конкретного радиомодуля). В настоящее время радиомодуль для дальней связи отсутствует. Внешний вид радиомодуля ближней связи изображен на рис. 2.7.
20

Данный радиомодуль позволяет производить обмен данными между роботизированным устройством и любым другим устройством, поддерживающим технологию Bluetooth. Благодаря этому имеется возможность управления роботизированным устройством со смартфона, планшета, ноутбука и др.
Конструктивно радиомодуль представляет собой широкополосный приемопередатчик на базе микросхемы BC417, работающий в диапазоне частот, близком к 2.4 ГГц. Несущая частота радиомодуля скачкообразно изменяется несколько раз в секунду. Имеется возможность адаптивной передачи данных с учетом текущей помеховой обстановки на рабочих частотах. Передача данных осуществляется по технологии Bluetooth. Более подробные характеристики радиомодуля приведены в табл. 2.6.
Рис. 2.7. Внешний вид радиомодуля роботизированного устройства [7] Таблица 2.6
Характеристики главного радиомодуля
Параметр |
Значение |
Напряжение питания |
3 – 6 В |
Потребляемый ток |
45 Ма |
Скорость передачи данных |
1200 – 1382400 бод |
Диапазон рабочих частот |
2.40 – 2.48 ГГц |
Максимальная дальность связи |
30 м |
Управление радиомодулем осуществляется посредством последовательного полнодуплексного интерфейса передачи данных UART при помощи передачи AT-команд. Кроме того, при сопряжении радиомодуля с другим устройством имеется возможность передачи данных, как если бы использовался при этом обычный COM-порт.
В приложении В представлена принципиальная схема радиомодуля. В составе радиомодуля имеется две микросхемы: собственно приемопередатчик и конвертер логических уровней. Приемопередатчик осуществляет всю обработ-
21