

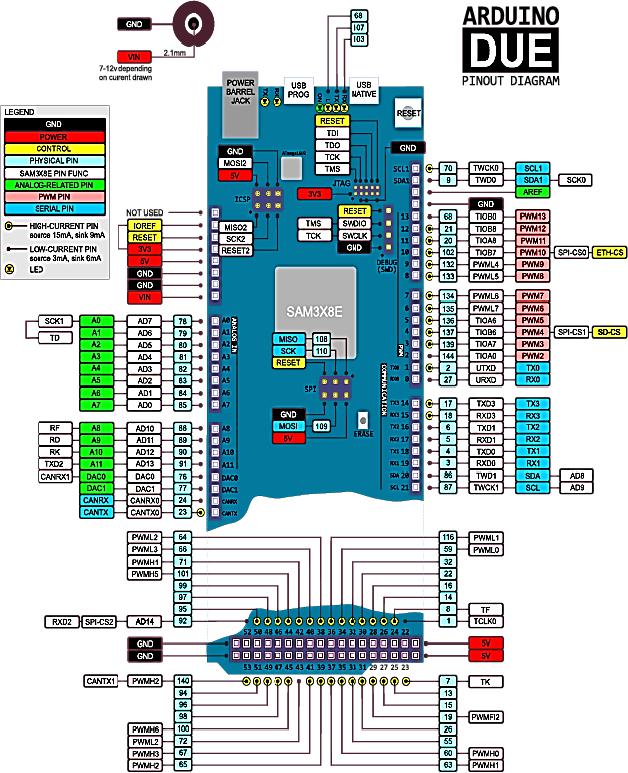
ПРИЛОЖЕНИЕ 11
Схема распиновки Arduino DUE
121
|
ОГЛАВЛЕНИЕ |
|
ВВЕДЕНИЕ.................................................................................................................. |
3 |
|
1. |
ОБЗОР НАУЧНО-ТЕХНИЧЕСКОЙ ЛИТЕРАТУРЫ...................................... |
5 |
2. |
АППАРАТНАЯ РЕАЛИЗАЦИЯ РОБОТИЗИРОВАННОГО |
|
УСТРОЙСТВА .......................................................................................................... |
11 |
|
|
2.1. Комплектующие ........................................................................................ |
11 |
2.1.1.Микроконтроллер. ..............................................................................11
2.1.2. |
Шасси и электропривод. ..................................................................... |
18 |
|
2.1.3. |
Радиомодуль ........................................................................................ |
20 |
|
2.1.4. |
Датчик температуры и влажности воздуха....................................... |
22 |
|
2.1.5. |
Инерциальный датчик......................................................................... |
23 |
|
2.1.6. |
Модуль вычисления глобального местоположения ........................ |
25 |
|
2.1.7. |
Ультразвуковой дальномер ................................................................ |
28 |
|
2.1.8. |
Модуль измерения радиоактивного фона......................................... |
31 |
|
2.2. |
Взаимодействие комплектующих............................................................ |
32 |
|
2.3. |
Сопряжение уровней логических сигналов ............................................ |
34 |
|
2.4. |
Интерфейс прямого доступа к памяти .................................................... |
38 |
|
2.5. |
Последовательный интерфейс UART микроконтроллера .................... |
38 |
|
2.6. |
Последовательный интерфейс i2c микроконтроллера ........................... |
41 |
|
3. ПРОГРАММНАЯ РЕАЛИЗАЦИЯ РОБОТИЗИРОВАННОГО |
|
||
УСТРОЙСТВА .......................................................................................................... |
45 |
||
3.1. |
Многозадачность ....................................................................................... |
45 |
|
3.2. |
Комбинированная многозадачность средствами ОСРВ........................ |
47 |
|
3.3. |
Управление тактовой частотой микроконтроллера ............................... |
48 |
|
3.4. |
Работа с последовательным интерфейсом UART .................................. |
49 |
|
3.5. |
Работа с последовательным интерфейсом I2C........................................ |
55 |
|
3.6. |
Управление по радиоканалу..................................................................... |
58 |
|
3.7. |
Вывод телеметрии ..................................................................................... |
62 |
|
3.8. |
Передвижение роботизированного устройства...................................... |
63 |
|
3.9. |
Измерение температуры и влажности воздуха....................................... |
65 |
|
3.10. |
Вычисление ориентации в пространстве ................................................ |
67 |
|
3.10.1. |
Получение измерений инерциального датчика................................ |
67 |
|
3.10.2. |
Калибровка датчика ............................................................................ |
71 |
|
122
3.10.3. Преобразование данных инерциального датчика............................ |
74 |
||
3.11. |
Вычисление глобального местоположения ............................................ |
81 |
|
3.12. |
Следование по маршруту.......................................................................... |
84 |
|
3.12.1. Вычисление направления на точку маршрута ................................. |
84 |
||
3.12.2. Удержание направления на точку маршрута ................................... |
84 |
||
4. ПРОГРАММА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ................................... |
86 |
||
4.1. Описание программы. .................................................................................... |
86 |
||
5. РАЗЛИЧНЫЕ РЕАЛИЗАЦИИ ИСПОЛНЕНИЯ................................................ |
89 |
||
РОБОТИЗИРОВАННОГО УСТРОЙСТВА ............................................................ |
89 |
||
5.1. Реализация устройства с использованием Wi-fi для передачи |
|
||
данных с комплекса на управляющую ПЭВМ....................................................... |
89 |
||
ЗАКЛЮЧЕНИЕ ....................................................................................................... |
|
108 |
|
БИБЛИОГРАФИЧЕСКИЙ СПИСОК.................................................................... |
109 |
||
ПРИЛОЖЕНИЕ 1. |
Принципиальная электрическая схема отладочной |
|
|
платы. ........................................................................................................................ |
|
|
111 |
ПРИЛОЖЕНИЕ 2. Принципиальная электрическая схема |
|
||
драйвера электродвигателей .................................................................................. |
112 |
||
ПРИЛОЖЕНИЕ 3. |
Принципиальная электрическая схема радиомодуля........ |
113 |
|
ПРИЛОЖЕНИЕ 4. |
Принципиальная электрическая схема датчика |
|
|
температуры и влажности воздуха ........................................................................ |
114 |
||
ПРИЛОЖЕНИЕ 5. |
Принципиальная электрическая схема инерциального |
|
|
датчика...................................................................................................................... |
|
|
115 |
ПРИЛОЖЕНИЕ 6. |
Принципиальная электрическая схема датчика |
|
|
глобального местоположения ................................................................................ |
116 |
||
ПРИЛОЖЕНИЕ 7. |
Принципиальная электрическая схема |
|
|
ультразвукового дальномера.................................................................................. |
117 |
||
ПРИЛОЖЕНИЕ 8. |
Принципиальная электрическая схема измерителя |
|
|
радиации................................................................................................................... |
|
118 |
|
ПРИЛОЖЕНИЕ 9. |
Принципиальная электрическая схема платы |
|
|
сопряжения............................................................................................................... |
|
119 |
|
ПРИЛОЖЕНИЕ 10. Принципиальная электрическая схема Arduino DUE....... |
120 |
||
ПРИЛОЖЕНИЕ 11. Схема распиновки Arduino DUE........................................ |
121 |
||
123
Научное издание
Журавлев Дмитрий Владимирович Наумов Даниил Игоревич Сиваш Михаил Александрович
МОБИЛЬНЫЕ РОБОТОТЕХНИЧЕСКИЕ КОМПЛЕКСЫ
Монография
Редактор Е. А. Кусаинова
Подписано в печать 26.10.2020.
Формат 60х84 1/16. Бумага для множительных аппаратов. Усл. печ. л. 7,2. Тираж 500 экз. Заказ № 108.
ФГБОУ ВО «Воронежский государственный технический университет»
394026 Воронеж, Московский просп., 14
Участок оперативной полиграфии издательства ВГТУ 394026 Воронеж, Московский просп., 14