

Для навигации роботизированное устройство использует помимо спутниковых навигационных систем GPS, GLONASS также инерциальную навигационную систему, построенную на базе математической обработки показаний датчиков (гироскопа, акселерометра и магнитометра) при помощи фильтра Маджвика. Благодаря этому роботизированное устройство способно автоматически следовать по точкам маршрута, в процессе передавая оператору данные телеметрии и своего состояния по радиоканалу.
Оператор в режиме реального времени имеет возможность дистанционно управлять роботизированным устройством со смартфона, работающего на операционной системе Android. Программа дистанционного управления обеспечивает оператора основными данными о текущем состоянии роботизированного устройства: текущие широта и долгота в глобальной системе координат, текущая ориентация в трехмерном пространстве, а также показания датчиков.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Юревич, Е. И. Основы робототехники: учеб. пособие / Е.И. Юревич.
–1985 г.
2. ATMega328P 8 bit microcontrollers: [Электронный ресурс]. Режим доступа: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-7810- Automo-tive-Microcontrollers-ATmega328P_Datasheet.pdf
3.Монк, С. Программируем Arduino. Профессиональная работа со скетчами / С. Монк. — СПб.: Питер, 2017.
4.Сергеев, С.Л. Архитектуры вычислительных систем: учебник / С.Л. Сергеев. – СПб.: БХВ-Петербург, 2010. – 240 с.
5.STM32F407xx 32 bit microcontroller: [Электронный ресурс]. Режим доступа: https://docviewer.yandex.ru/view/
6.L298. Dual f ull b ridge d river: [Электронный ресурс]. Режим доступа: https://static.chipdip.ru/lib/142/DOC000142991.pdf
7.Архипкин, В.Я. Bluetooth. Технические требования. Практическая реализация / В.Я. Архипкин, А.В. Архипкин.
8.Datasheet SHT3x-DIS: [Электронный ресурс]. Режим доступа: http:// wiki.amperka.ru/_media/
9.MPU-9250 Product Specification Revision 1.1: [Электронный ресурс].
Режим доступа: https://www.invensense.com/wp-content/uploads/2015/02/PS-М PU-9250A-01-v1.1.pdf
10. Серапинас, Б.Б. Глобальные системы позиционирования: учеб. издание / Б.Б. Серапинас. – М.: Каталог, 2002. – 106 с.
11. Яценков, В.С. Основы спутниковой навигации. Системы GPS NAVSTAR и ГЛОНАСС. - М.: Горячая линия-Телеком,2005. - 272 с.
12. MT3333 All-in-One GNSS Datasheet: [ Электронный ресурс].Режим дос-
тупа: https://mediatek-club.ru/wp-content/uploads/2017/04 MT3333_Datasheet.pdf
109
13.Набор команд управления приемников глобальных навигационных спутниковых систем ГЛОНАСС, GPS, GALILEO NL3333, KL3333 и SL3333: [Электронный ресурс]. Режим доступа: http:// naviawireless.ru/wp-content/uploads/Opisanie-komand-NL3333_KL3333-i- SL3333E-v1_0.pdf
14.Денисюк, Р.Э. Лазерный дальномер для систем ма-шинного зрения роботов / Р.Э. Денисюк, Д.Н. Кузнецов // Cборник тезисов докладов Второго регионального научно-практического семинара Теоретические и практические аспекты приборострое-ния, 18 апреля 2013, Луганск, кафедра Приборы, ВНУ им. В.Даля. – c. 20–21.
15.П. Хоровиц, Искусство схемотехники / П. Хоровиц. – Москва: МИР,
1983.
16.Многозадачность [Электронный ресурс]. Режим доступа: https://ru.wikipedia.org/wiki/
17.FreeRTOS – операционная система для микроконтроллеров: [Элек-
тронный ресурс]. Режим доступа: https://www.kit-e.ru/assets/files/pdf/2011_ 02_96.pdf
18.Sebastian O.H. Madgwick An efficient orientation filter for inertial and in-ertial/magnetic sensor arrays. 2010: [Электронный ресурс]. Режим доступа: http://www.x-io.co.uk/res/doc/madgwick_internal_report.pdf
19.Лазарева Т. Я. Основы теории автоматического управления: учеб. пособие / Т.Я. Лазарева, Ю.Ф. Мартемьянов. – 2-е изд., перераб. и доп. – Тамбов: Изд-во Тамб. гос. техн. ун-та, 2004. – 352 с.
20. Бюро научно-технической информации. [Электронный ресурс]. Ре-
жим доступа: http://www.bnti.ru/showart.asp?aid=456&lvl=02.01.02.02.
110

ПРИЛОЖЕНИЕ 1
Принципиальная электрическая схема отладочной платы
111
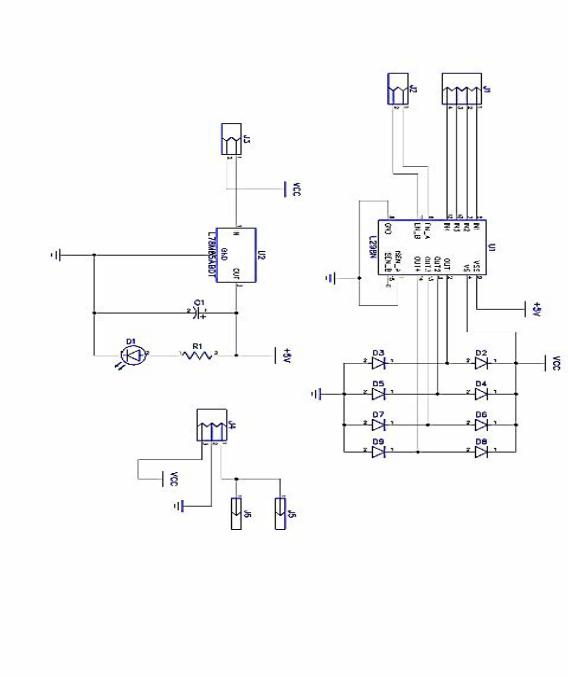
ПРИЛОЖЕНИЕ 2
Принципиальная электрическая схема драйвера электродвигателей
112