

Методическое пособие 719
.pdf1 |
, 2, 4 |
|
|
|
|
|
|
|
|
|
1, |
|
|
|
|
|
|
|
|
|
3 |
|
|||||||
|
|
|
1. |
|
|
Вычисление |
|
|
координат |
остальных точек и нахождение углов |
|||||||||||||||||||
|
|
|
|
|
|
и расстояний |
|
|
|
|
|
|
, необходимых для вычисления коэффициента |
|
. |
||||||||||||||
Отображение S представляется следующими формулами: |
|
|
|
||||||||||||||||||||||||||
|
|
2 |
1 |
, если 1 |
≤ |
|
|
− 1 "Отклонений не выявлено" |
|
|
|
||||||||||||||||||
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
|
1 |
, если |
+ 1 ≤ |
|
1 |
≤ 1 |
− 1 |
" степень плоскостопия" |
|
|
|
||||||||||||||||||
1 |
, если 1 |
+ 1 |
≤ |
1 |
≤ 1 |
− 1 " степень плоскостопия" |
|
|
|||||||||||||||||||||
|
3 |
|
1 |
|
2 |
|
|
≥ 1 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
, если 1 |
|
+ 1 " степень плоскостопия" |
|
|
|
|||||||||||||||||||||
|
|
|
2 |
:в противном случае невозможно определить |
|
|
|
||||||||||||||||||||||
|
|
|
21 |
, если 2 ≤ 21 |
|
− 2 "Отклонений не выявлено" |
|
|
|
||||||||||||||||||||
|
|
|
|
|
угол V пальца стопы: |
|
" степень плоскостопия" |
|
|
|
|||||||||||||||||||
22, если 21 |
+ 2 |
≤ |
2 |
≤ 2 |
− 2 |
|
|
|
|||||||||||||||||||||
23 |
, если 2 |
+ 2 |
≤ |
2 |
≤ 23 |
− 2 |
" степень плоскостопия" |
|
|
|
|||||||||||||||||||
|
|
|
24 |
, если 2 |
≥ 24 |
+ 2 " степень плоскостопия" |
|
|
|
||||||||||||||||||||
|
|
|
3 |
в противном случае невозможно определить |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
31, если 3 |
≤ 31 |
− 3 "Стопа полая" |
|
|
|
|||||||||||||||||
|
3 |
, если 3 |
+ 3 ≤ |
|
3 |
|
≤ 3 |
− 3 |
"Отклонений не выявлено" |
|
|
||||||||||||||||||
33 |
, если 32 |
+ 3 |
≤ |
3 |
≤ 3 |
− 3 |
" |
|
степень |
плоскостопия |
" |
|
|
||||||||||||||||
|
34, если 3 |
+ 3 |
≤ |
|
3 |
≤ 34 |
− 3" |
|
|
" |
|
|
|||||||||||||||||
|
2 |
|
|
|
1 |
|
+ 3 |
≤ |
|
3 |
|
|
2 |
|
|
"Стопа |
пониженным сводом" |
|
|
||||||||||
35, если 34 |
|
≤ 35 |
− 3 степень плоскостопия |
|
|
||||||||||||||||||||||||
|
|
|
4 |
36, если 3 |
≥ 36 |
|
+ 3 |
" степень плоскостопия" |
|
|
|
||||||||||||||||||
|
|
|
: |
|
в противном случае невозможно определить |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
42, если 42 |
≤ 4 |
− 4 |
"Норма" |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
состоян |
е заднего отдела стопы: |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
, |
≥ |
|
+ |
|
|
"уплощение" |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
4 |
4 |
|
4 |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
в противном случае невозможно определить |
|
|
|
||||||||||||||||||||||||||
Таким образом, по четырем характеристикам, получаемым из изображения стопы, можно определить состояние каждого из ее трех отделов [4]. Эти данные в дальнейшем используются врачами для корректировки, при необходимости, а также для подбора дальнейшего лечения и профилактики обнаруженных патологий.
Описанный ранее алгоритм является недостаточно точным для введения его во врачебную практику, поэтому его улучшение планируется сделать с помощью нейросетевых алгоритомов, а именно использования сверточных нейронных сетей для анализа медицинских изображений, используя технологию
80
глубокого обучения. Как известно, нейронные сети используются во многих областях жизни людей, не исключением является и сфера медицины. Главной особенностью является возможность существенно улучшить эффективность функционирования системы за счет возможности обучения. Работа алгоритма будет заключаться переходе от конкретных особенностей изображения к более абстрактным деталям, и далее к ещё более абстрактным деталям вплоть до выделения понятий высокого уровня. Система должна будет выделять наиболее существенные детали, игнорируя маловажные. Очевидно, что работу врача не способен заменить никакой алгоритм на данный момент, однако с помощью подобных систем возможно существенно облегчить его работу, а также система будет выступать в роли некоего помощника для сопоставления ее результатов и заключения доктора.
Литература
1.Кристофер Бишоп. Распознавание образов и машинное обучение / Би-
шоп Кристофер. – Springer, 2006. – 245 с.
2.Ильясова, Н.Ю. Информационные технологии анализа изображений в задачах медицинской диагностики / Н.Ю. Ильясова, А.В. Куприянов, А.Г. Храмов. – Медицина, 2018. – 424 с.
3.Портал искусственного интеллекта [Электронный ресурс]. Режим дос-
тупа: http://www.aiportal.ru
4.Научный портал [Электронный ресурс]. Режим доступа: https: //postnauka.ru/
5.Научная электронная библиотека [Электронный ресурс]. Режим досту-
па: https://elibrary.ru
ФГБОУ ВО «Воронежский государственный технический университет», Россия
УДК 551.501.8
В.А. Калугин, Л.А. Коробова
МОДЕЛЬ СИСТЕМЫ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ТЕХНОЛОГИЧЕСКИХ ТРУБОПРОВОДАХ
Любая технологическая система состоит из аппаратов, соединенных между собой трубопроводами. Зачастую, протяженность трубопроводов достаточно велика. Проверка их целостности актуальна и очень затратная по времени и людским ресурсам [1, 2].
На данный момент существует множество приборов – дефектоскопов, имеющих различные принципы работы, но также существует и ряд параметров, позволяющих оценить их эффективность:
81
−разрешение – точность определения размеров и места расположения дефекта;
−скорость диагностики – как правило, является параметром обратным разрешению, так как чем быстрее проходит диагностика, тем ниже точность определения дефекта;
−степень изоляции прибора от внешних воздействий, таких как попадание влаги, повышенное давление и посторонние вибрации;
−чувствительность к температуре – точность результатов диагностики может снизиться при работе прибора в условиях критических температур или же прибор может вовсе выйти из строя;
−способ крепления.
В ультразвуковых дефектоскопах используется эхо-метод, или иначе, теневой метод. Принцип работы дефектоскопа, использующего эхо-метод, состоит в подаче ультразвукового сигнала (импульса) дефектоскопом к месту исследования и фиксация времени возврата отражения этого сигнала от дефектной области. Преимуществами данного вида дефектоскопов над иными являются: низкая степень зависимости от материала исследуемого объекта; высокая распространенность; умеренная надежность; умеренная скорость. Недостатками же: довольно высокая требовательность к параметрам поверхности исследуемого объекта; сравнительно высокая стоимость.
Капиллярная дефектоскопия основана на методе визуального обнаружения тонких поверхностных трещин и неровностей материала. Определенную поверхность заполняют специальными индикаторными веществами, которые проникают в трещины и расщелины под действием сил капиллярности. На очищенную от излишков индикаторных веществ поверхность наносят тонкий слой порошка-проявителя (сорбент). Частицы индикатора вытягиваются из трещин, обрисовывая контуры трещины, к тому же образуя яркое свечение в ультрафиолетовых лучах. Преимуществами данного вида дефектоскопов над иными являются: высокая надежность; умеренная скорость. Недостатками же обнаружение лишь тех дефектов, что проявляются на поверхности.
Суть метода магнитно-порошковой дефектоскопии состоит в выявлении рассеивания магнитного поля над дефектами. Принцип данного метода состоит в нанесении магнитного порошка на рассматриваемый участок. При воздействии магнитным полем частицы намагничиваются и соединяются, образуя скопления порошка в районах трещин. Преимуществами данного вида дефектоскопов над иными являются: высокая скорость нахождения поверхностных дефектов; дешевизна; наглядность; надежность. Недостатками же: невозможность диагностики без разборки в районе стыков деталей; работа только с намагничиваемыми материалами; определенные трудности при размагничивании крупных деталей; небольшая глубина исследования.
Основой принципа работы вихретоковых дефектоскопов лежит измерение вихревых токов, возникающих в районе образующихся дефектов в магнитном поле. Если такие токи возникают, то показания электромагнитного поля
82
вихревых токов фиксируются для каждого проблемного участка и в результатом их обработки является информация о образовавшемся дефекте. Преимуществами данного вида дефектоскопов над иными являются: высокая чувствительность; скорость диагностики; минимальная погрешность; низкая стоимость. Недостатками же: небольшая глубина исследования (до 2 мм); чувствительность к токопроводности материала; средняя надежность.
Анализ наиболее востребованных на данный момент методов дефектоскопии показал, что появилась необходимость и востребованность дальнейших исследований в данном направлении в целях усовершенствования уже имеющегося на рынке оборудования обнаружения дефектов и неполадок.
Разрабатываемая модель обнаружения дефектов в технологическом трубопроводе предлагается для реализации в технологических системах, в качестве дополнительного модуля для обнаружения нарушений в работе трубопроводов или вентиляционных систем и их последующей локализации с целью предотвращения аварий и полного устранения, связанных с ними проблем. Основной задачей для решения подобного рода проблем является обнаружение дефектов в технологических системах с целью их дальнейшего своевременного устранения [2].
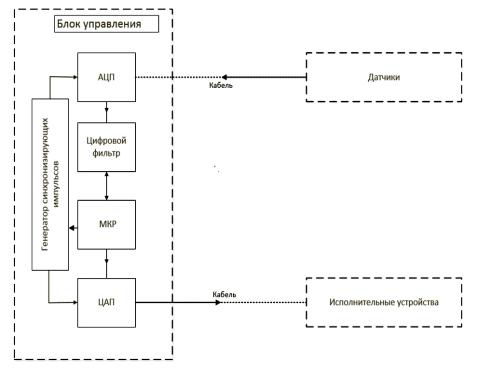
Способ применения разрабатываемой модели будет основываться на цепи вибродатчиков, расположенных с определенным интервалом по всей протяженности исследуемой технологической системы и осуществляющих фиксацию шумов с определенной периодичностью (рис. 1).
Рис. 1. Схематическая иллюстрация аппаратного устройства разрабатываемой модели
Так как колебания распространяются в оба направления от источника с
83

одинаковой скоростью, то пара датчиков должны считать частоту колебания технологической среды, которая в дальнейшем будет преобразована в цифровой сигнал и передана на блок управления, в автоматическом режиме выполняющий обработку этой информации путем фильтрации сигнала. В ходе фильтрации сигнала, интересующие нас частоты, будут выделяться, а побочные устраняться. После фильтрации и последующего за ней анализа, путем сравнения фактического параметра сигнала с заданным параметром. Микроконтроллер, в зависимости от результата, должен будет либо продолжить поддержку технологического процесса, либо, в случае обнаружения неисправности осуществить аварийную остановку технологического процесса и отправить соответствующее уведомления на рабочую станцию для последующего устранения неисправности. Так как отклонение от нормы зафиксирует пара датчиков, расположенных на конкретном участке технологической системы, то дефектный участок будет обнаружен с достаточно большой точностью, что позволить значительно сократить время устранения неисправности [5, 6].
АЦП, цифровой фильтр, микроконтроллер (МКР), ЦАП, а также генератор импульсов, синхронизирующих работу АЦП и ЦАП, объединяются в блок управления, который обрабатывает данные, поступающие с датчиков. Задачей микроконтроллера в целом является управления работой всех устройств, осуществляющих обработку информации в составе блока управления. В целом, блок управления должен обеспечивать частоту опроса датчиков около 200 Гц. Информация с датчиков на блок управления может передаваться проводным способом, либо беспроводным (Радиосвязь, Wi-Fi). В случае большой нагрузки на блок управления вследствие разветвленности системы или использования большого количества датчиков можно будет использовать несколько блоков управления, объединенных в одну локальную вычислительную сеть через маршрутизатор и сервер.
Суть разрабатываемой модели информационных потоков [8] представлена на контекстной диаграмме процесса (рис. 2) и ее декомпозиции (рис. 3).
Рис. 2. Контекстная диаграмма IDEF0 процесса «Определение дефектов в технологических системах»
84

Преимуществами предлагаемой разработки являются следующие [9, 10. 11]:
1)возможность регулирования периодичности анализа технологической среды на предмет наличия дефектов;
2)возможность обнаружения точного обнаружения конкретной дефектной области технологической системы [9];
3)универсальность использования в различных технологических средах, благодаря возможности задания эталонных параметров;
4)относительно невысокая стоимость оборудования;
5)простота и интуитивная понятность в эксплуатации.
6)высокая надежность за счет отсутствия сложных элементов. Внедрение и последующая эффективная эксплуатация данной модели
[12]позволит, за счет предупреждения аварийных ситуаций и возможности обнаружения отклонений с точностью до дефектного узла, увеличить срок службы оборудования и значительно сократить расходы на его обслуживание и ремонт.
Рис. 3. Декомпозиция контекстной диаграммы
85
Литература
1.Жумаев, К.К. Выявление внутренних и наружных дефектов трубопроводов ультразвуковыми дефектоскопами [Текст] / К.К. Жумаев, Н.О. Каландаров // Молодой ученый. 2014. № 16. С. 67–68.
2.Щербинский, В.Г. Методы дефектоскопии сварных соединений [Текст] / В.Г. Щербинский. – 1987. – С. 57–64.
3.Гурвич, А.К. Ультразвуковой контроль сварных швов [Текст] / А.К. Гурвич, И.Н. Ермолов. – Киев: Техшка, 1972.
4.Филинов, М.В. Капиллярный контроль [Текст] / М.В. Филинов. – М.: Машиностроение, 2004. – 736 с.
5.Сергиенко, А.Б. Цифровая обработка сигналов [Текст] / А.Б. Сергиенко. – СПб.: Питер, 2002. – 608 с.
6.Марпл, С.Л. мл. Цифровой спектральный анализ и его приложения [Текст] / С. Л. Марпл мл. – Москва: «Мир», 1990. – 571 с.
7.Абрамов, Г.В. Проектирование информационных систем / Г.В. Абрамов, И.Е. Медведкова, Л.А. Коробова // Учебное пособие : Воронеж, 2012.
8.Abramov, G.V. Information system for diagnosis of respiratory system diseases / G. V. Abramov, L. A. Korobova, A. L. Ivashin, I. A. Matytsina I.A. // Journal of Physics: Conference Series (см. в книгах). 2018. Т. 1015. С. 042036.
9.Коробова, Л.А. Программная реализация нечеткой модели распознавания звуковых сигналов / Л.А. Коробова, Т.В. Курченкова, И.А. Матыцина // Научные ведомости Белгородского государственного университета. Серия: Математика. Физика. 2016. № 13 (234). С. 174-178.
10.Абрамов, Г.В. Анализ и использование математических методов для распознавания звуковых сигналов / Г.В. Абрамов, Л.А. Коробова, А.Л. Ивашин, И.А. Матыцина // Вестник Воронежского государственного университета инженерных технологий. 2015. № 2 (64). С. 61-65.
11.Калугин, В.А. Обнаружение дефектов в технологических трубопроводах / В.А. Калугин, Л.А. Коробова // В сборнике: Моделирование энергоинформационных процессов. Сборник материалов VII национальной научнопрактической конференции с международным участием. 2019. С. 242-250.
12.Bukharin, S.V. The method of immersion the problem of comparing technical objects in an expert shell in the class of artificial intelligence algorithms / S.V Bukharin, A.V. Melnikov, S.N. Chernyaeva, L.A. Korobova // В сборнике: IOP Conference Series: Materials Science and Engineering International Conference on Materials. 2017. С. 012208.
АНОО ВО «Воронежский институт высоких технологий», Россия
86
УДК 004.415.2
Е.О. Долгих, О.В. Минакова
КОНЦЕПТУАЛЬНАЯ МОДЕЛЬ СВОБОДНО РАСШИРЯЕМЫХ ПРОГРАММ ОБРАБОТКИ БИОМЕДИЦИНСКИХ ДАННЫХ
Не подлежит сомнению, что в настоящее время любое программное приложение, предназначенное для решений прикладной задачи, должно быть расширяемо. Так при разработке сначала реализуются основные функции систем, а потом дорабатываются остальные. Пользователь сначала осваивает базовый функционал приложения, а потом уже у него возникает потребность в дополнительных настройках и сервисах. Следует также отметить, что специалисты, не работающие в ИТ, консервативны по природе, они освоили одну программу и ее интерфейс им понятен и удобен, они не хотят обучатся работе с другой более совершенной программой, отрывая время от основной профессиональной деятельности. А время и технологии развиваются и «удобной» программе уже не хватает нового функционала.
В связи с этим была поставлена цель – проектирование программного комплекса для обработки экспериментальных данных в прикладной задаче, в частности обработки биомедицинский данных.
Прототипом разрабатываемого комплекса является BioStat [AnalystSoft Inc., www.analystsoft.com ]. Пакет BioStat – специализированный статистический пакет компании AnalystSoft. Основан на базе известного пакета StatPlus и включает в себя почти весь его функционал, в том числе регрессионный анализ, анализ выживаемости, дисперсионный анализ. Программа использует электронную таблицу, совместимую с Microsoft Excel как по формату данных, так и по интерфейсу, что делает процесс изучения программы легким и быстрым.
Достоинства BioStat:
–экспорт/импорт данных в MS Excel;
–требуемая память на жестком диске компьютера 32 MB;
–проверка правописания;
–совместимость с операционными системами Windows и Mac.
Несмотря на наличие больших программных систем таких как Statistica, BioStat, Statistical Analysis System, AtteStat, StatBase и тому подобные, в про-
фессиональной деятельности медицинского работника их использование требует большой предварительной подготовки и углубленных знаний статистического анализа, поэтому разработка программ обработки данных ориентированной на корректную сферу – здравоохранение, актуальна.
При создании прототипа был решено ограничится следующими программными модулями: загрузки данных, расчета описательной статистики, по-
87

строения блоковых графиков и дисперсионного анализа. Другие методы анализа будут добавляться по запросу.
Для того, чтобы система была расширяема, эта возможность должна быть заложена в архитектуру приложения. К ним относятся – микроядерная [1] и микросервисная архитектура [2].
Микроядерная архитектура состоит из двух основных компонентов: основной системы (ядра) и модулей расширения (плагинов). Структура на рис. 1.
Плагин |
|
|
|
Плагин |
||
|
|
|
Ядро системы |
|
|
|
|
|
|
|
|
||
|
|
|
|
|||
|
|
|
|
|
|
|
Плагин |
|
|
|
Плагин |
||
|
|
|
|
|
|
|
Плагин |
|
Плагин |
|
||
|
|
|
Рис. 1. Микроядерная архитектура программной системы
Ядро содержит минимум бизнес-логики, но управляет загрузкой, выгрузкой и запуском необходимых модулей дополнительного функционала. То есть плагины не связны друг с другом. Разные плагины для одного и того же приложения могут разрабатываться разными программистами, не зависимо друг от друга, что обеспечивает системе высокую гибкость и простоту в тестирующих испытаниях. Высокая степень переносимости обусловлена тем, что весь ма- шинно-зависимый код изолирован в микроядре, поэтому для переноса системы на новый процессор требуется меньше изменений и все они логически сгруппированы вместе. Несмотря на выше перечисленные плюсы, у данной архитектуры есть и минусы. Такие как:
–большой объем оперативной памяти для работоспособности системы;
–большое количество программного кода для реализации сопряжения; зависимость производительности приложения от количества подключен-
ных и активных плагинов;
–временные затраты на поиск и исправление ошибок ввиду сложности механизма обмена данными между основной системой и дополнительными модулями;
–усложнение сопровождения по причине управления множеством различных процессов.
Микросервисная архитектура или архитектура микрослужб — это архитектура, при котором единое приложение строится как набор небольших серви-
88

сов, каждый из которых работает в собственном процессе и коммуницирует с остальными используя легковесные механизмы, как правило HTTP. Структура микросервисной архитектуры представлена на рис. 2. Эти сервисы построены вокруг бизнес-потребностей и развертываются независимо с использованием полностью автоматизированной среды. Существует абсолютный минимум централизованного управления этими сервисами. Сами по себе эти сервисы могут быть написаны на разных языках и использовать разные технологии хранения данных.
Поскольку каждый микросервис является отдельным проектом, то может быть разработан отдельной командой разработчиков, то есть над системой могут одновременно трудиться несколько десятков программистов. Микросервисная архитектура позволяет с легкостью масштабировать приложение для внедрения новой функции (развертывание каждого микросервиса происходит по отдельности), создается новый сервис, а если какой-то функцией никто не пользуется, то сервис просто отключается.
Очевидным недостатком этой архитектуры является необходимость передачи большого количества данных между микросервисами, а, как следствие, повышенная сложность разработки и тестирование таких систем.
На практике микросервисы часто используют в распределенных системах (Amazon, Netflix, Twitter), а микроядерную в настольных системах (операцион-
ная система Windows, Eclipse IDE).
Сравнив выше изложенные архитектуры, было решено использовать архитектуру микроядра в виду более простой, по сравнению с микросервисной архитектурой, разработкой, а также возможностью более быстрой тестируемостью программного продукта.
|
|
|
Данные |
|
|
|
учетных |
|
|
Сервис |
записей |
Мобильное |
API шлюз |
учетных |
|
API |
записей |
|
|
приложение |
|
||
API |
|
|
|
|
|
|
|
|
|
Данные о |
|
|
Сервис |
товаре |
Браузер |
API |
товаров |
|
|
|
Web- |
|
Данные |
Приложение |
|
|
магазина |
Сервис |
перевоза |
Web |
перевозок |
|
|
API |
|
Рис. 2. Микросервисная архитектура
89