

Методическое пособие 719
.pdfЗадача синтеза систем управления является одной из важнейших в теории управления. Различным способам синтеза алгоритмов управления посвящено большое количество работ. Зачастую они посвящены синтезу законов управления для линейных систем [1,2], что не всегда приемлемо для нелинейных объектов.
Одним из рассматриваемых в данной работе способов разработки алгоритма управления, является метод синтеза системы управления в пространстве состояний.
Расчет параметров настройки регулятора при помощи методов модального управления предполагает изменение собственных чисел матрицы объекта (мод) для достижения желаемой цели управления. Суть такого метода заключается в приравнивании желаемого и реального характеристического уравнения замкнутой системы для вычисления из полученного соотношения параметров
регулятора [3]. |
̇= + , |
(1) |
|
Объект управления рассматривается в форме: |
|
||
где x — n-мерный вектор |
= , |
|
|
|
|
состояния; y — l-мерный вектор выходных (ре- |
|
гулируемых) переменных; u — m-мерный вектор управляющих воздействий; A
— матрица, определяющая динамические свойства объекта управления, размерности n × n; B — матрица входа управляющих воздействий размерности n × m; C — матрица выхода размерности l × n; n — порядок объекта управления.
Для решения поставленной задачи необходимо перейти от исходного |
||||||||
полинома: |
|
|
|
|
̅= ̅+ |
|
||
описания объекта управления к преобразованной системе |
(2) |
|||||||
Матрица А̅ |
является |
сопровождающей матрицей характеристического |
||||||
|
|
|
̇ |
̅ |
|
|
||
|
|
|
φА(λ)=λn+an-1 |
λn-1+ an-2 λn-2+…+a1λ+a0 |
(3) |
|||
Связь между описаниями (1) и (2) определяется матрицей перехода: |
||||||||
|
|
|
|
|
Pu= ̅MyMy-1, |
(4) |
||
где ̅My – матрица управляемости преобразованной системы, |
My – матри- |
|||||||
ца управляемости исходной системы. |
|
|
|
|||||
Управляющее воздействие формируется как линейная функция всехпе- |
||||||||
где k- |
|
|
= −( 1 1 |
+ + ) = − ̅ |
|
|||
ременных состояния: |
|
|
|
|
, |
(5) |
||
ра. |
матрица размерностью 1 × n параметров настройки регулято- |
|||||||
|
|
|
|
|
|
|
|
|
Дифференциальные уравнения системы получаются в результате подстановки выражения (5) в выражение̇= ((1):+ )
(6)
Желаемая сопровождающая матрица А̅полинома φA(λ) имеет вид:
150
̅ |
0 |
1 |
|
0 |
|
… |
0 |
, |
|
0 |
0 |
|
1 |
|
… |
0 |
(7) |
||
= |
0 |
0 |
|
… |
|
… |
1 |
|
|
|
|
0 |
|
|
|
||||
|
− |
− − … − |
|
||||||
в которой элементами0 |
последней строки являются коэффициенты харак- |
||||||||
|
1 |
|
2 |
|
−1 |
|
|
||
теристического полинома φA(λ) с противоположными знаками. |
|
|||||||||||
Матрица-столбец В̅состоит из нулей, кроме единицы в последней строке, |
||||||||||||
и запишется: |
|
|
|
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(8) |
||
|
|
|
0 |
1 |
0 |
0 |
|
… |
0 |
|
||
|
|
|
1 |
|
|
|
||||||
Матрица системы А-ВК будет |
иметь вид: |
|
|
|
|
|||||||
… |
1 |
|
… |
0 |
|
(9) |
||||||
А + ВК = |
0 |
0 |
|
|
|
|||||||
0 |
0 |
|
|
… |
|
… |
1 |
|
||||
|
|
|
|
|
0 |
+ 2 |
|
|
||||
Искомые |
|
|
0 + 1 |
1 + 2 |
2 |
−1 |
+ −1 |
|
|
|||
А+ВК: |
коэффициенты регулятора находятся из равенства матриц А̅ и |
|||||||||||
|
|
|
ki=ai-1-a̅i-1 . |
|
|
|
(10) |
|||||
|
|
|
|
|
|
|
||||||
Параметр, определяющий радиус распределения корней характеристиче- |
||||||||||||
ского полинома ω0 |
находится из соотношения: |
|
|
|
|
|||||||
|
|
|
|
|
|
0 |
, |
|
|
|
(11) |
|
|
|
|
|
время0 |
регулирования в системе с эталонным |
|||||||
где τ0 – безразмерное |
= |
р |
|
|
|
|
|
|||||
характеристическим полиномом; τр – время регулирования в реальной системе. Таким образом, система управления объектом (1) будет включать в себя
управляющее воздействие в виде пропорционального регулятора. Пропорциональные регуляторы, как правило, не обеспечивают отслежи-
вания установок или возмущающих воздействий по нагрузке в системе. Таким образом, желательно переформулировать постановку задачи синтеза таким образом, чтобы в управлении появилась интегральная составляющая, снижающая ошибки регулирования [4].
Существует много способов введения интегральной составляющей. Один из них основан на расширении состояния, путем добавления к n первоначаль-
ным p новых переменных z(t), где |
|
|
|
(12) |
||
|
|
|
|
|||
Расширенное состояние |
будет являться (n+p) - мерным вектором: |
|
||||
|
̇= |
|
|
|||
|
= −1 |
|
. |
(13) |
||
|
̅ − ∫ |
|
|
|||
Соответствующий |
оптимальный регулятор имеет вид: |
|
||||
= … |
|
|
||||
|
|
|
|
2 |
|
|
151
Для существования такого регулятора необходимо, чтобы число переменных состояния, для которых вводится интегральное управляющее воздействие, не превышало числа переменных управления. [4]
Так как химические реакторы, как правило, являются многомерными, многосвязными и нелинейными объектами управления, то системы управления, разработанные методами в линейной постановке, не всегда обеспечивают поддержание оптимального режима работы. Поэтому в данной работе рассматривается синтез системы управления на основе аналитического конструирования агрегированных регуляторов (АКАР) [5,6].
Суть синергетической концепции управления заключается в формировании в фазовом пространстве объекта искусственных аттракторов – притягивающих инвариантных многообразий. Все траектории движения замкнутой системы «объект-регулятор» стягиваются на инвариантное многообразие за счет соответствующих законов управления [7].
Для решения поставленной задачи требуется найти закон управления:
u(ψ)=u(x1,…xn), |
(14) |
который обеспечивает перевод изображающей точки системы из произвольного |
|
начального состояния сначала в окрестность многообразия |
|
ψ(x1,…xn)=0, |
(15) |
в пространстве координат x1,…xn , а затем дальнейшее движение вдоль этого многообразия в некоторую стационарную точку [8].
При создании систем управления также часто используются астатические законы управления, включающие в себя интегральные составляющие, что улучшает точностные свойства систем в установившемся режиме движения. [8] В данной работе на примере химического реактора решается задача синтеза и анализа алгоритмов управления концентрацией целевого компонента для
системы управления в пространстве состояний, а так же при помощи синергетической теории управления, с использованием методов компьютерного моделирования.
Описание объекта и постановка задачи управления |
|||||
В химическом реакторе емкостного типа с мешалкой протекает двухста- |
|||||
+ 1 |
→ 1 |
, |
1 |
→ 2 |
, |
дийная экзотермическая реакция: |
1 |
|
2 |
||
|
|
|
|
|
|
где A, B – исходные реагенты; P , P2 – продукты реакции; k1, k2 – константы скоростей. Целевой продукт – P1.
152

Рис. 1. Принципиальная схема химического реактора
Аппарат функционирует в изотермическом режиме. Назначением объекта управления является проведение химической реакции. Цель функционирования
– получение продукта Р1 с заданной концентрацией.
На рис. 1 введены обозначения: ν1, ν2 – расходы потоков исходных компонентов; САвх, СВвх – концентрации исходных компонентов; ν – расход смеси на выходе из реактора; t – температура смеси в реакторе; СА, СВ, СР1, СР2 – концентрации продуктов реакции; V – объем смеси в реакторе.
В соответствии с допущениями математическая модель химического реактора примет вид:
|
|
dC |
A |
|
|
|
|
вх −(ν |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
=ν |
C |
1 |
+ν |
2 |
)C |
A |
+V (−K C C |
|
) |
|
||||||||||
|
dτ |
|
|
|||||||||||||||||||||
|
|
|
|
|
1 |
A |
|
|
|
|
|
|
|
1 |
A B |
|
|
|||||||
|
|
dC |
B |
|
|
|
|
вх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(16) |
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
dτ |
|
=ν |
2CВ |
+V (−K1CACB )−(ν1+ν2)CB |
|
|||||||||||||||||||
|
|
dC |
Р1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
V |
|
=V (K C C |
|
−K C |
Р1 |
)−(ν |
1 |
+ν |
2 |
)C |
Р1 |
|
||||||||||||
|
|
|
|
|||||||||||||||||||||
|
|
dτ |
|
|
|
|
1 |
A B |
|
|
2 |
|
|
|
|
|||||||||
Система (16) решается при соответствующих начальных условиях: CA =CA0,CB =CB0,Cр1=CР10 , где CA0,CB0,Cр10 - решение уравнений статики.
Анализ математической модели показывает, что объект управления является нелинейным, многомерным и многосвязным.
Задача системы управления следует из цели функционирования аппарата
– стабилизация концентрации целевого компонента на заданных значениях в условиях действия возмущений.
В качестве управляющего воздействия для регулирования концентрации целевого компонента целесообразно использовать расход входного потока ν1.
Исследование системных свойств объекта
Важным этапом исследования химического реактора как объекта управления является исследование таких свойств, как устойчивость, управляемость, наблюдаемость и построение статических и динамических характеристик.
153
Анализ статических и динамических характеристик показал, что объект нелинеен по большинству каналов, в том числе по каналу управления.
Анализ устойчивости показал, что объект обладает свойством устойчиво-
сти свободного движения, так как корни характеристического уравнения (λi) |
|||||
|
|
|
|
|
− . . |
имеют отрицательные вещественные части: |
|||||
Были исследованы свойства |
|
= −. |
|||
варианта, где измеряется только |
|
|
−. |
||
имеют полный ранг. |
|
|
управляемости и наблюдаемости для такого |
||
|
С = ( ) |
|
|||
|
|
|
концентрация целевого вещества, и матрица |
||
измерений имеет вид: |
|
|
. Матрицы управляемости и наблюдаемости |
||
|
Таким образом, объект полностью наблюдаем и полностью |
||||
управляем в пространстве состояний.
Синтез системы управления в пространстве состояния
Поскольку математическая модель объекта нелинейна, была проведена
процедура линеаризации в окрестности рабочей точки для получения модели в |
|||||||||||||||||
|
|
|
|
|
−. |
− . |
|
|
|
|
|
|
|
|
|||
пространстве состояний (1) и получены матрицы А и В: |
|
|
|
|
|
|
|||||||||||
|
|
А = |
|
− . |
− . |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
. |
. |
|
|
− . |
|
|
|
|
|
|||
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
Управляющее |
|
|
В = − . |
|
|
|
|
|
|
|
|
|||||
|
Зададимся |
|
|
|
|
−. |
|
|
|
= − |
|
|
|
|
(17) |
||
|
|
= −( + + ) |
|
|
|
|
|
||||||||||
|
|
|
воздействие (6) будет иметь вид: |
|
|
|
|
|
|
||||||||
|
|
желаемым характеристическим полиномом (3) в силу того, что |
|||||||||||||||
порядок объекта n=3: |
D(s)=s3+3s2ω0+3sω02+ω03=0 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
(18) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Матрица A̅(7) и B̅(8) будет иметь вид: |
|
|
|
|
|
|
|
|
||||||||
|
А = |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
−. − |
− . − |
|
− . − |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
. |
|
|
|||||
|
|
|
. |
|
|
|
|||||||||||
|
Получили матрицу |
преобразований Pu из соотношения (4): |
|
|
|
|
|||||||||||
|
|
|
В = |
|
|
|
|
|
|
|
|
|
|
||||
|
= |
|
|
|
|
|
|
|
|
− . |
|
|
|||||
|
Из соотношения−.(11) получили−параметр. ω |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
||||
τ |
=610 мин. |
|
. |
|
|
0= |
|
при τ0=6 мин и |
|||||||||
р |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|||
154
Из (10) получили параметры настройки регулятора преобразованной сис-
темы:
k1= 6.83*10-6 k2= 1.09*10-3 k3= 0.044
Умножив параметры настройки преобразованной системы на матрицу преобразований Pu, получили параметры настройки регулятора исходной системы:
k1= 4.281 |
k2= 39.295 k3= 0.49 |
|
|||||||||||||||||
Система управления объектом (16) будет включать в себя управляющее |
|||||||||||||||||||
уравнение: |
|
|
|
|
= |
− = −( . + . 9 + . ) |
|
||||||||||||
воздействие в виде пропорционального регулятора: |
|
||||||||||||||||||
При введении интегральной составляющей к модели (16) |
добавляется |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
(19) |
Модель объекта управления примет вид: |
|
||||||||||||||||||
|
|
dC |
A |
|
|
|
|
|
вх |
|
|
|
|
|
|
|
|||
V |
|
|
|
= ν C |
A |
− (ν |
1 |
+ ν |
2 |
)C |
A |
|
|||||||
|
|
|
|
|
|||||||||||||||
|
|
dτ |
1 |
|
|
|
|
|
|||||||||||
+V (−K C |
C |
B |
) |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
1 A |
|
|
|
|
|
|
|
|
||||||
dC |
|
=ν2CВвх +V (−K1CACB )−(ν1+ν2 )CB |
|
||||||||||||||||
V |
|
B |
(20) |
||||||||||||||||
|
dτ |
||||||||||||||||||
|
dC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
V |
|
|
Р1 |
=V (K1CACB −K2CР1)−(ν1+ν2 )CР1 |
|
||||||||||||||
|
|
dτ |
|
||||||||||||||||
dz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
CР1 |
|
|
|
|
|
|
|
|
|
|
|
|||||
dt |
= |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
При помощи вышеописанной методики была получена линеаризованная модель объекта (20), исследованы свойства устойчивости, наблюдаемости и управляемости, получены параметры настройки регулятора исходной системы:
k1= 0.443 |
k2= -1.001 k3= -2.687 |
k4= -0.016 |
|
|
||
Таким образом, система управления объектом (20) будет включать в себя |
||||||
= −1̅ − = −(−1.001 |
− 2.687 |
− 0.016 |
) − 0.433 |
|
||
управляющее воздействие в виде ПИ-регулятора: |
|
|
|
|
||
2 |
|
|
|
|||
Синтез системы управления методом акар
Для синтеза закона управления запишем расход первого потока ν1 в виде:
ν1= ν10+Δν1
И перепишем уравнения (16) в удобной форме, введя обозначения:
155
|
|
|
dCA |
= f 1 + |
|
|
|
(CAвх −CA ) |
∆ν1 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
dτ |
|
|
|
|
|
|
V |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
dCB |
= f |
2− |
CB |
∆ν1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
dτ |
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C p1 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
dCР1 |
|
= f 3 − |
|
∆ν |
1 |
|
|
|
|
|
|
||||||||||||||||
|
|
|
dτ |
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|||||||||
Где |
f1 = |
ν 0(C |
|
вх −C |
A |
)−ν |
|
C |
|
−VK C C |
|
|
|
|
|||||||||||||||||
|
|
|
|
1 |
|
|
A |
|
|
|
|
|
2 A |
|
1 A B |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|||
|
f2= |
ν |
2(CВ |
|
−CВ )−V (K1CACB )−ν1 CB |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
f3= |
V (K C C |
|
−K C |
Р1 |
)−ν |
|
C |
Р1 |
−ν 0C |
p1 |
||||||||||||||||||||
|
|
|
|
|
|
|
1 A B |
|
|
2 |
|
|
|
2 |
1 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Введем следующую агрегированную макропеременную, в силу того, что |
|||||||||||||||||||||||||||||||
управление Δν1 |
непосредственно входит в уравнение концентрации целевого |
||||||||||||||||||||||||||||||
компонента: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ψ1=Ср1-Ср̅1=0 |
|
|
|
(21) |
||||||||||||||||||||||
И, подставив ее в функциональное уравнение: |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
T1dψ1 |
+ψ1 =0 |
|
|
|
|
(22) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dτ |
|
|
|
|
|
|
|
|||||||||||
где Т1- настроечный параметр, в силу уравнений системы (20), запишем функциональное уравнение в развернутом виде и проведем преобразования:
|
dψ1 |
|
= f 3− |
Cp1 |
∆ν |
|
|
|
|
||||||||
|
dτ |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
V |
1 |
|
|
|
|
|
|||||||
|
C p1 |
|
|
|
|
(Cp1− |
|
p1) |
|
||||||||
f 3− |
∆ν1=− |
C |
|
||||||||||||||
V |
|
|
|
|
T1 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Получим выражение для закона управления: |
|
||||||||||||||||
|
(Cp1− |
|
p1) |
|
|
|
|
||||||||||
Δν1=V |
C |
+ f 3 |
V |
|
(23) |
||||||||||||
T Cp |
Cp |
||||||||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
1 |
|
|
1 |
|
|
|
|
1 |
|
|
||||
В конце процесса управления будем иметь:
Ср1- Ср̅1=0 → Ср1= Ср̅1
Условие устойчивости алгоритма управления: Т1>0.
Управление Δν1 (23) переводит изображающую точку системы сначала на многообразие ψ1=0 (21), затем в начало координат пространства состояний системы.
Для решения задачи синтеза астатического алгоритма управления расши-
рим пространство состояний, введя в рассмотрение дополнительную пере- |
|||
менную: |
|
= 1 − 13 |
(24) |
|
|
|
|
156

Введем следующую агрегированную переменную, в силу того, что управление Δν1 непосредственно входит в уравнение концентрации целевого компонента:
|
|
ψ2=(Ср1- Ср̅1)+γz=0, |
|
|
|
|
|
|
|
|
|
(25) |
|||||||||||||||||||||
где γ- настроечный параметр. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
И, подставив ее в функциональное уравнение |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
T2dψ2 |
+ψ2 = |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(26) |
||||||||
|
|
|
|
|
|
|
|
|
dτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
В силу уравнений системы (20), запишем функциональное уравнение в |
|||||||||||||||||||||||||||||||||
развернутом виде и проведем преобразования: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
dψ2 |
= f |
3− |
Cp1 |
∆ν + |
γ |
dz |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
dτ |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
dτ |
|
|
|
V |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
dψ2 |
|
= f 3− |
Cp1 |
∆ν |
+γ (C |
|
|
− |
|
|
|
) |
|
|
|
|
|
|||||||||||||
|
|
|
|
p1 |
C |
p1 |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
dτ |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
Cp1 |
|
|
|
|
|
|
|
)= |
(Cp1− |
|
p )+γz |
|
|
|
|
||||||||||||||||
|
f 3− |
∆ν +γ |
(C |
|
|
− |
|
|
|
C |
|
|
|
||||||||||||||||||||
|
p1 |
C |
p |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
V |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
T2 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Найдем закон управления: |
+ 3 1 |
+ |
|
|
|
|
|
1 |
|
|
|
||||||||||||||||||||||
∆1 = |
1 |
2 1 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
) |
|
||||||||||
|
( |
− )+ ) |
|
|
|
|
|
|
|
|
|
|
|
− |
|
||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
(27) |
||
Закон Δν1 (27) переводит изображающую точку в окрестность многообразия ψ2=0 (25) В конце процесса управления будем иметь:
ψ2=(Ср1- Ср̅1)+γz=0→ Ср1= Ср̅1- γz
Изображающая точка движется вдоль ψ2=0 под действием управления Δν1 и попадает в начало координат пространства состояний системы. Условия устойчивости алгоритма управления: Т2>0, γ>0.
Получены параметры настройки регуляторов: Т1=300 мин;
γ=0,008;Т2=125 мин.
Математическое моделирование и результаты
Для проверки работоспособности полученных алгоритмов управления было проведено компьютерное моделирование замкнутой системы управления.
Моделирование проводилось при конструктивных и технологических па-
раметрах объекта: V = 500 л; Vхл = 290 л; ν1 = 3 л/мин; ν2 = 3.5 л/мин; САвх = 19.74 моль/л; САвх = 5 моль/л; энергия активации Е=48635 Дж/моль; предэкспоненци-
альные множители констант скорости К10=120000 л/(моль мин) и К20=12000
157

л/(моль мин); заданные значения концентраций компонентов А, В, С: С А = 7.21
моль/л; СВ = 0.787 моль/л; СР1 = 1.843 моль/л; t = 68.45 ᵒС.
Проводились исследования ковариантности систем с заданием. На рис. 2 и 3 показаны результаты работы системы при изменении задания на ±10% от значения в статике.
Рис. 2. Изменение регулируемой переменной и управляющего воздействия при увеличении задания на 10% (1 – система управления с П-регулятором состояния; 2 – система управления с ПИ-регулятором
состояния; 3 – синергетическая система управления; 4 – синергетическая система управления с астатической составляющей)
Рис. 3. Изменение регулируемой переменной и управляющего воздействия при увеличении задания на -10% % (1 – система управления
сП-регулятором состояния; 2 − система управления
сПИ-регулятором состояния; 3 – синергетическая система управления; 4 – синергетическая система управления с астатической составляющей)
158
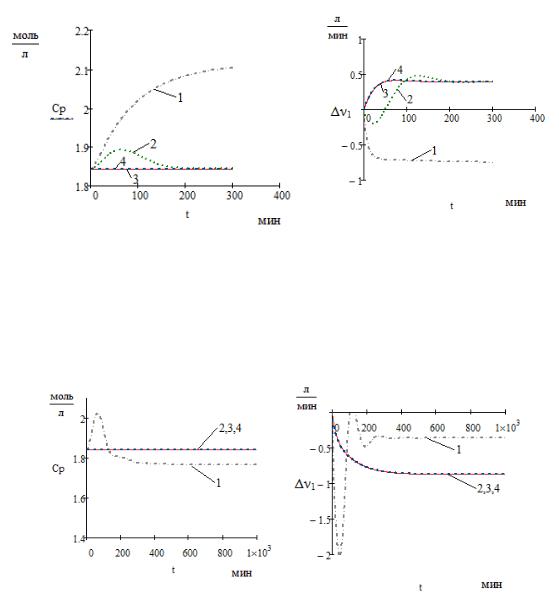
Проводились исследования инвариантности систем к возмущению. В качестве возмущения подавалось ступенчатое изменение концентрации вещества А на входе в реактор. На рис. 4 и 5 показаны результаты работы системы при изменении концентрации вещества А на входе на ±20% от значения в статике.
Рис. 4. Изменение регулируемой переменной и управляющего воздействия при изменении концентрации вещества А на входе на 20% %
(1 – система управления с П-регулятором состояния; 2 – система управления с ПИ-регулятором состояния; 3 – синергетическая система управления; 4 – синергетическая система управления с астатической составляющей)
Рис. 5. Изменение регулируемой переменной и управляющего воздействия при изменении концентрации вещества А на входе на -20%
(1 – система управления с П-регулятором состояния; 2 – система управления с ПИ-регулятором состояния; 3 – синергетическая система управления;
4 – синергетическая система управления с астатической составляющей)
Из рис. 2-5 видно, что система управления с пропорциональным регулятором состояния всегда имеет статическую ошибку. Система управления с ПИрегулятором состояния и синергетические системы управления выводят концентрацию целевого продукта на заданное значение, время регулирования (Тр)
159