

Методическое пособие 715
.pdfИнфракрасная видовая разведка
Инфракрасная видовая разведка (тепловизионная разведка ) – добывание развединформации путем регистрации изображений, соответствующих распределению собственной тепловой энергии, излучаемой объектом.
Тепловизионная разведка может вестись в любое время суток (в частности, в темноте) и используется для обнаружения замаскированных объектов по их невидимому глазом тепловому излучению.
Тепловое излучение сильнее теряет энергию при распространении в атмосфере по сравнению с излучением в видимом диапазоне. На некоторых длинах волн оно вообще не проходит через атмосферу, так как рассеивается и поглощается на молекулах. Поэтому ИК-разведка ведется в нескольких дискретных поддиапазонах (полосах): коротковолновом, средневолновом, длинноволновом (рис. 2.15).
Проблемы создания разведаппаратуры, работающей в ИК-диапазоне, связаны с необходимость обеспечить необходимую чувствительность при приемлемых массогабаритных характеристиках. По сравнению с аппаратурой, работающей в видимом диапазоне длин волн, ИК-аппаратура должна иметь площадь элементов ФПУ, пропорциональную увеличенной длине волны (до 10 мкм в ИК диапазоне против 0,5 мкм в видимом), чтобы обеспечить сравнимую чувствительность ФПУ. Для снижения шумов ФПУ, ограничивающих чувствительность, долгое время использовались технологии охлаждения ФПУ, что приводило к удорожанию и увеличению размеров ИК аппаратуры. Достаточно долго тепловизоры применялись с КА для обнаружения факелов работающих двигателей ракет, с самолетов, вертолетов, кораблей и военной техники. С развитием новых веществ и материалов тепловизоры стали доступны в носимом варианте.
Основные технические характеристики тепловизора
Scout BTS Bi – Ocular представлены в табл. 2.9.
61

Белая область – область ослабления энергии за счет поглощения и рассеяния
SWIR (short wave infra red) – коротковолновый ИК-диапазон
MWIR (middle wave infra red) – средневолновый ИК-диапазон
LWIR (long wave infra red) – длинноволновый ИК-диапазон
Рис. 2.15. Диапазоны длин волн ИК-излучения и проницаемость атмосферы
62
Таблица 2.9 Основные технические характеристики тепловизора
Scout BTS Bi - Ocular
Тип прибора |
Бинокуляр |
|
|
|
|
Разрешение матрицы, пиксели |
320×240 |
|
|
|
|
Фокусное расстояние объектива, мм |
100 |
|
|
|
|
Дальность обнаружения фигуры |
2075 |
|
человека, м |
||
|
||
|
|
|
Тип детектора |
Микроболометр на основе |
|
оксида ванадия |
||
|
||
|
|
|
Спектральный диапазон |
7,5 - 13,5 |
|
чувствительности, мкм |
||
|
||
|
|
|
Поле зрения, градусы |
5x3 |
|
|
|
|
Температурная чувствительность, |
<50 при f/1,0 при +25°C |
|
мК |
||
|
||
|
|
|
Частота обновления кадров, Гц |
8,3 |
|
|
|
|
Диапазон ручной фокусировки |
от 5 м до бесконечности |
|
|
|
|
Диоптрийная настройка, диоптрии |
+/-2 |
|
|
|
|
Увеличение, крат |
1 |
|
|
|
|
Цифровое увеличение, крат |
2 |
|
|
|
|
Обработка сигнала |
Цифровое усиление |
|
деталей (DDE) |
||
|
||
|
|
|
Время старта, с |
<5 |
|
|
|
|
Дисплей |
Цветной ЖК-дисплей |
|
VGA |
||
|
||
|
|
63
|
Продолжение табл. 2.9 |
|
Тип прибора |
Бинокуляр |
|
|
|
|
|
Горячие объекты белого |
|
Палитра |
цвета, горячие объекты |
|
черного цвета, горячие |
||
|
||
|
объекты красного цвета |
|
|
|
|
Возможность фото/видео съемки |
Да |
|
|
|
|
Гнездо под штатив |
Да |
|
|
|
|
|
4 батареи типа AA: |
|
Источник питания |
перезаряжаемые NiMH, |
|
обычные Li-Ion или |
||
|
||
|
Alkaline |
|
|
|
|
Время работы, ч |
5 |
|
|
|
|
Габариты прибора, мм |
279x165x67 |
|
|
|
|
Вес, г |
1000 |
|
|
|
Дальность обнаружения космического объекта по его тепловому излучению определяется по формуле:
,
где NETD - эквивалентная шуму разность температур; SNR - отношение сигнал/шум;
D0 - размер апертуры аппаратуры ИКР;
F - фокусное расстояние аппаратуры ИКР; τ0 - коэффицент передачи оптики
w - размер квадратного детектора;
IT =LTAT - интенсивность теплового излучения;
/ - дифференциальная излучательная способность.
64
Формирование многоспектральных и гиперспектральных изображений
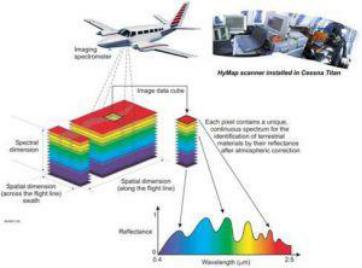
Гиперспектральное изображение - это трехмерный массив данных (куб данных), который включает в себя пространственную информация (2D) об объекте, дополненную спектральной информацией (1D) по каждой пространственной координате. Иными словами, каждой точке изображения соответствует спектр, полученный в этой точке снимаемого объекта.
До появления техники записи гиперспектральных изображений для получения информации об объекте (участке местности) использовались мультиспектральные (многоспектральные) изображения, то есть наборы фотографий, полученные с помощью цветных светофильтров.
Для получения гиперспектральных изображений используется специальные гиперспектральные камеры, принцип действия которых можно понять из рис. 2.16.
Рис. 2.16. Иллюстрация принципа работы гиперспектральной камеры
65

Лазерная видовая разведка
Под лазерной видовой разведкой понимается процесс получения изображений путем облучения объектов зондирующими оптическими сигналами с последующим формированием псевдоизображения на основе цифровой обработки принятых сигналов. Лазер измеряет расстояние до каждой точки объекта, и затем это расстояние отображается на снимке с соответствующей интенсивностью.
Основными преимуществами лазерной видовой разведки являются:
-высокая детальность изображения, определяемая длиной волны излучения;
-возможность получения изображения при любой (в том числе отсутствующей) освещенности объекта;
-возможность формирования объемных («голографических») изображений.
Для получения изображений используются лазерные сканеры различного вида и назначения, в том числе портативные и воздушные (рис. 2.17).
Рис. 2.17. Внешний вид лазерных сканеров
Портативный сканер Focus 3D X 330 работает на расстоянии до 330 м. Ошибка измерения дальности ± 2 мм, вес 5,2 кг, размеры 24х20х10 см.
66
Длина волны зондирующего излучения лазера должна совпадать с окнами прозрачности атмосферы и лежать в области максимальной контрастности объектов разведки и фонов. Высота применения зависит от многих факторов: мощности лазера, чувствительности ФПУ, коэффициента ослабления лазерного излучения в атмосфере, угловой разрешающей способности системы и других параметров. Разрешающая способность лазерной системы определяется шириной зондирующего лазерного луча и углом поля зрения приемной оптики. Воздушное лазерное сканирование проводится в широком диапазоне высот от 500 до 9000 м над уровнем моря в зависимости от рельефа. Воздушный лазерный сканер Leica ALS70-CM обеспечивает точность измерений 7-10 см по высоте и 5-15 см в плане в зависимости от высоты сканирования.
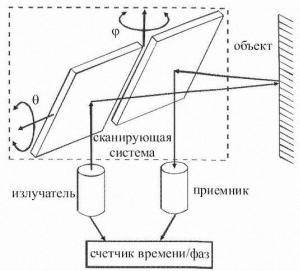
Принцип сканирования показан на рис. 2.18.
Рис. 2.18. Иллюстрация принципа лазерного сканирования
Импульсный метод измерения расстояний основан на измерении времени прохождения сигнала от приёмо-
67
передающего устройства до объекта и обратно. Зная скорость распространения электромагнитных волн c, можно определить расстояние как:
R = c τ / 2, |
(2.5) |
где τ — время, измеряемое с момента подачи импульса на лазерный диод до момента приёма отражённого сигнала. Импульсный метод измерения расстояний по точности уступает фазовому методу. Это происходит потому, что фактическая точность каждого измерения зависит от ряда параметров, каждый из которых может оказать влияние на точность конкретного измерения. Таковыми параметрами являются:
-длительность и форма (в частности, крутизна переднего фронта) зондирующего импульса;
-отражательные характеристики объекта;
-оптические свойства атмосферы;
-текстура и ориентация элементарной поверхности объекта вызвавшей отражение зондирующего луча по отношению к линии визирования.
Фазовый метод измерения расстояний основан на определении разности фаз посылаемых и принимаемых модулированных сигналов. В этом случае расстояние вычисляется по формуле:
R = φ2R c / (4πƒ), |
(2.6) |
где φ2R – разность фаз между опорным и рабочим сигналом; ƒ – частота модуляции. Режим работы фазоизмерительного устройства зависит от его температуры, с изменением которой незначительно изменяется фаза сигнала. Вследствие этого точное начало отсчета фазы определить нельзя. С этой целью фазовые измерения повторяются на эталонном отрезке (калибровочной линии) внутри прибора. Главное преимущество фазового метода измерения – более высокая точность, которая может достигать единиц миллиметров.
68
Радиолокационная видовая разведка
Изображения в радиодиапазоне получают с использованием РЛС бокового обзора (РЛС БО). РЛС БО размещают на воздушных носителях или на космических аппаратах. Антенна PЛС облучает электромагнитными волнами поверхность земли и принимает отраженные элементами этой поверхности сигналы. Форма диаграммы направленности антенны обеспечивает равномерность облучения всех элементов в пределах заданной площадки на поверхности земли. Очевидно, что с каждым из этих элементов можно сопоставить определенный элемент апертуры антенны. Апертурой называют поверхность раскрыва зеркальной антенны в плоскости раскрыва. Если бы все элементы площадки переизлучали энергию зондирующих сигналов в фазе, то в фокусе зеркальной параболической антенны они сложились бы в фазе, а энергия суммарного сигнала возросла во столько раз, сколько, элементов содержится на площадке. Эту площадку можно было бы рассматривать как антенну с большой апертурой, синтезированную элементами площадки.
РЛС БО– когерентная импульсная РЛС. Когерентными называют РЛС, позволяющие сравнивать частоту и фазу зондирующих и принятых отражений импульсов. Принципы работы РЛС показаны на рис. 2.19.
Летательный или космический аппарат находится в точке «0», и пролетает с постоянной скоростью Vп вдоль оси х на высоте Н. Передающее устройство работает в импульсном режиме. Ширина диаграммы направленности передающей антенны Qа. Антенна наклонена к вертикали 001, на так называемый «угол выноса» В. Благодаря этому, импульсными сигналами облучается площадка шириной L3 и протяженностью L. Это и есть площадка, образующая синтезированную антенну. Интенсивность отражаемых элементами площадки сигналов определяется эффективной отражающей поверхностью каждого элемента i,j, фазой отраженного сигнала Ji,j (i,j
– номер элемента на площадке S). Благодаря сферической расходимости падающей на площадку S волны i,j и Ji,j для
69
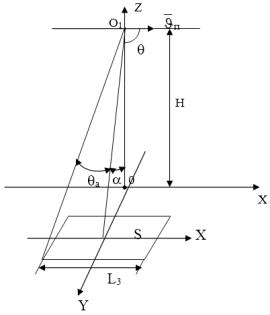
каждого элемента Si,j индивидуальны и зависят от физических свойств площадки, фазового сдвига, накопленного при распространении волны. Ранее отмечалось, что в фокусе облучателя антенны сигналы суммируются.
Рис. 2.19. Принципы работы РЛС БО
Очевидно, что при суммировании n m сигналов можно было бы получить лишь некоторую среднюю, зависящую от отражающих свойств совокупности элементов энергию. Чтобы получить изображение, отраженные элементами сигналы необходимо предварительно упорядочить в пространстве времени приема и фазы. При этом должно быть выполнено следующее условие: суммироваться в каждый момент времени должны сигналы, отраженные одной и той же элементарной площадкой Si,j (рис. 2.20). Иными словами, в результате упорядочения все импульсы, излученные и отраженные за время пролета летательного аппарата на расстояние L должны быть просуммированы на позиции Si,j, т.е. на каждой позиции должны
70