

Методическое пособие 715
.pdfсцена, включающая объект и фон, на котором он расположен;
атмосфера;
оптическая система фотоаппарата (видеокамеры);
ФПУ;
оператор-дешифровщик (зрительный анализатор).
Каждый из перечисленных элементов можно характеризовать соответствующей ЧКХ, поэтому математическая модель канала ФТВР представляет набор ЧКХ отдельных ее элементов.
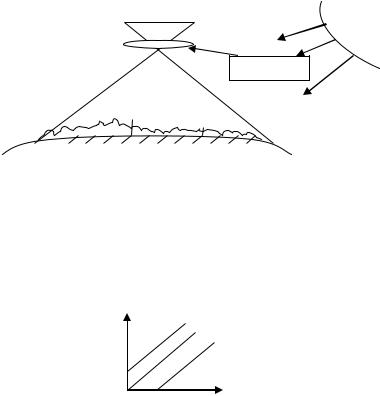
Обобщенный канал утечки информации при ФТВР представлен на рис. 4.23.
Объект |
среда |
Аппаратура |
|
ФТВР |
|||
|
|
Внешний источник освещения
Рис. 4.23. Канал утечки информации при ФТВР
Объект характеризуется размером и спектральным коэффициентом яркости.
Фототелевизионная аппаратура характеризуется ЧКХ объектива, ТВС структурой относительно отверстия, временем экспозиции, фокусом, чувствительностью.
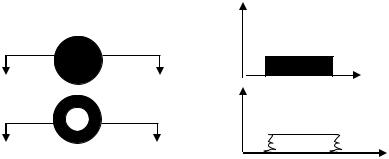
Фактически матрица проецируется на изображение, то есть на приемник. Получаем поле электрических зарядов, величина которого пропорциональна распределению яркости. Так как граница между соседними ПЗС элементами четко очерчена, а каждый элемент имеет собственный шум, то на результирующей картинке получается мозаичная структура. Фон каждого элемента картинки отличается от соседнего. Вместо распределения яркости - распределение интенсивности зарядов (рис. 4.24).
181
объектив
Рис. 4.24. Освещение аппаратуры ФТВР
Исходная матрица находится в фокусе линзы, когда она проецируется на землю, то образуется квадрат. Уровень зарядов разный, следовательно, элементы матрицы при одинаковой освещенности будут разными. На рис. 4.25 показано распределение потенциала по матрице.
i
Еi
Рис. 4.25. Распределение потенциала по матрице
У каждого элемента матрицы есть кривая
|
i |
|
(Еi).
Уровень
|
i |
|
зависит от размеров, частоты элементов,
следовательно, разброс и уровень зарядности будут отличаться и на выходе будет мозаика. Матрица позволяет получить изображение в цифровом виде и можно делать обработку изображения.
Возможность применения алгоритмов цифровой обработки изображения для получения дешифрующих свойств изображения и согласования объема передаваемой информации
182
с характеристиками канала связи, при этом возможно повысить дешифровочные свойства за счет увеличения градиента яркости.
В полученном изображении главное получить четкие контуры объекта - границы перепада яркости. Существует алгоритм цифровой обработки, восстанавливающий изображение, который заключается в следующем. На исходном изображении (рис. 4.26) ищем перепады яркости (уменьшение сигнала ведет к размытию границ и их интенсивности), которые усиливаем.
grad-1
grad-2
Рис. 4.26. Градиенты яркости для изображения объекта
В данном случае grad-1 > grad-2. Усиливая grad-2, мы восстанавливаем изображение. Данная операция носит название - операция подчеркивания контуров.
Однако при поиске перепадов и усилении могут появиться ложные контуры, что может привести к искажению добываемой информации.
Для оценки возможностей аппаратуры разведки, в том числе ТВР, в статистических дуэльных ситуациях используются следующие информационные показатели:
-вероятность обнаружения объекта Раоб ;
-вероятность определения формы объекта Рфа ;
-среднеквадратическая ошибка измерения линейных размеров объекта l.
183

При оценке возможностей аппаратуры ТВР по обнаружению целесообразно исходить из того, что основным признаком, по которому дешифровщик принимает решение об обнаружении объекта, является превышение перепада оптической плотности «объект-фон» на ФПУ над ее шумами.
Поэтому для расчета вероятности обнаружения необходимо рассчитать величину воспринимаемого дешифровщиком отношения сигнал/шум при дешифрировании.
Воспринимаемое отношение сигнал/шум при дешифрировании изображений, полученных аппаратурой ФТВР, определяется формулой
|
|
|
q |
д |
q |
вн |
|
|
|
|
q |
|
|
В |
В |
|
|
, |
|||
|
q |
|
|
|
|
|||||
|
В |
|
|
|
q |
|
|
|||
|
|
|
|
д |
2 |
|
|
вн |
2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
В |
|
|
|
В |
|
|
(4.25)
где
qд
в
- воспринимаемое отношение сигнала к шуму
пространственной дискретизации;
q |
вн |
- воспринимаемое отношение сигнала к внутренним |
|
|
|
|
В |
|
шумам приемника излучения.
Величина
qд
в
может быть рассчитана по формуле
q |
д |
4 |
n |
, |
|
||||
в |
|
э |
||
|
|
|||
где значение nэ определяется согласно (4.27).
(4.26)
|
|
S |
|
|
F |
|
2 |
|
|
|
|
||||
n |
|
|
и |
|
|
, |
|
|
|
||||||
и |
|
S |
|
|
D |
|
|
|
|
э |
|
||||
|
|
|
|
н |
|
||
(4.27)
где Sи – площадь пространственного интегрирования изображения;
F – фокусное расстояние объектива; Dн – дальность разведки.
184
Входящая в (4.27) величина площади пространственного интегрирования Sи, вследствие физиологических особенностей процесса зрительного восприятия ограничена величиной, равной площади 90…160 элементов разрешения. Поэтому для расчета Sи следует использовать формулу
|
S |
об |
, |
|
|
|
если S |
об |
160 S |
; |
Sи |
|
|
|
|
|
|
э |
|
||
|
|
S |
|
|
в противном случае, |
|||||
|
160 |
э |
||||||||
|
|
|
|
|
|
|
|
|
|
|
(4.28)
где Sоб – площадь наблюдаемой проекции объекта.
Для расчета воспринимаемого отношения сигнала к внутренним шумам используется формула
q |
вн |
|
|
в |
|
q |
э |
|
n |
|
|
э |
.
(4.29)
В (4.29) отношение сигнал/шум в элементе разрешения qэ представляет собой отношение разности Н действующих на приемник излучения экспозиций объекта и фона к уровню внутренних шумов приемника, который принято оценивать эквивалентной шуму экспозицией Nш,
|
|
|
|
|
|
|
Е |
Е |
|
|
t |
|
|
|
|
|
ΔH |
|
|
|
|
экс |
|
||||
q |
|
|
|
|
о |
ф |
|
|
, |
||||
д |
N |
|
|
|
N |
|
|
|
|
||||
|
|
ш |
|
|
|
ш |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
(4.30)
где Ео, Еф – освещенность чувствительного элемента приемника, обусловленная объектом и фоном.
Освещенность чувствительного элемента ФТВР определяется формулой
E |
о ф |
0,25 Е |
з |
r |
|
a |
2 |
, |
(4.31) |
|
|
о ф |
|
|
|
|
где Ез – освещенность земли;- относительное отверстие объектива.
185
Поэтому, подставляя в
|
|
0,25 Е |
|
|
|
|
r |
||
q |
|
|
з |
o |
э |
|
|
||
|
|
|
|
|
(4.31) в
r |
|
|
|
||
ф |
|
|
N |
ш |
|
|
|
|
(4.30),
τ |
|
θ |
2 |
а |
|
||
|
|
|
получим
t |
экс |
. |
|
||
|
|
(4.32)
В выражении (4.32) не учитывается влияние пространственно-частотных характеристик объекта Тоб (ν) и чувствительного элемента ФТВР Тп (ν) на процесс формирования изображения. Принимая во внимание, что ПЧХ характеризуют степень уменьшения контраста изображения при его прохождении через соответствующие звенья ФТВР, для корректного учета влияния ПЧХ преобразуем (4.31) к следующему виду
|
|
0,25 Е |
|
|
r |
|
τ |
|
θ |
2 |
t |
|
К |
|
|
|
r |
|
а |
|
экс |
о |
|||||||
q |
|
|
з |
o |
ф |
|
|
|
|
|
||||
э |
|
|
|
N |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
ш |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
,
(4.33)
где Ко=
r |
r |
o |
ф |
r |
r |
o |
ф |
- натуральный контраст объекта.
В
учетом образом:
результате формула |
для расчета величины |
q |
э |
, с |
|
|
|
|
|
влияния ПЧХ может |
быть записана следующим |
|||
|
|
0,25 Е |
|
|
|
|
r |
||
q |
|
|
з |
o |
э |
|
|
||
|
|
|
|
|
r |
|
τ |
|
|
а |
||
ф |
|
||
θ 2 tэкс
Nш
К |
о |
|
Т |
об |
|
ν |
э |
Т |
п |
ν |
э |
|
|
|
,(4.34)
а выражение для расчета воспринимаемого отношения сигнала к внутренним шумам приемника примет вид
186

|
|
0,25 Е |
|
|
r |
|
τ |
|
θ |
2 |
t |
|
К |
|
|
Т |
|
ν |
|
Т |
|
ν |
|
F S |
|
||
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
q |
вн |
|
з |
o |
ф |
|
а |
|
|
|
|
|
экс |
|
о |
|
об |
|
э |
|
п |
|
э |
|
и |
||
В |
|
|
|
|
|
|
N |
|
|
D |
|
S |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
ш |
э |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
||||
.
(4.35)
Таким образом, на основе выражений (4.27), (4.28) и (4.35) может быть определено воспринимаемое отношение сигнал/шум в случае АТР.
С учетом того, что величина воспринимаемого отношения сигнал/шум находится во взаимном однозначном соответствии с информационными показателями оценки возможностей аппаратуры фотографической разведки, их расчет может быть осуществлен с использованием критерия обнаружения объектов на фоне случайных шумов (критерия Розелла-Вильсона).
Обнаружение простых объектов на фоне случайных шумов является хорошо изученным визуальным процессом. Исследовано маскирующее действие двух основных типов шумов. Это - не зависящие от сигнала аддитивные гауссовы шумы, типичные для фотонных приемников излучения, работающих при высоком уровне фона, и зависящие от сигнала мультипликативные пуассоновы шумы, присущие оптическим сигналам и типичные для приемников излучения, работающих при низком уровне фона. Попытки объяснить сущность обнаружения визуальной системой оптических сигналов на фоне шумов, распределенных по законам Гаусса и Пуассона, и теоретически предсказать результаты эксперимента делаются на основе флуктуационной теории.
Вероятность обнаружения различных простых объектов на фоне аддитивных белых гауссовых шумов исследовалась экспериментальным путем. В ходе экспериментов с телевизионным изображением на телевизионном экране либо получали прямоугольную волну на фоне белого гауссова шума и определяли порог обнаружения в зависимости от пространственной частоты, либо определяли пороги обнаружения прямоугольных тест-объектов на фоне «живых»
187
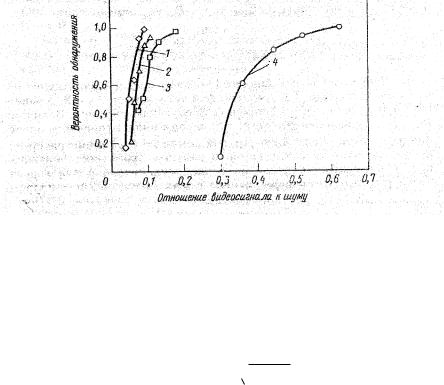
шумов. В случае фотографического изображения определялись условия обнаружения на фотографиях трехштрихового тестобъекта на фоне шумов. Некоторые из этих экспериментальных результатов представлены на рис. 4.27 для конкретных значений постоянной времени глаза Те, частоты обновления информации , площади объекта на индикаторе Sоб, площади корреляции шумов на индикаторе Sэ (номинально соответствующей элементу разрешения), спектра напряжения шума g (f) и VGA видеоконтрольного устройства rm. Все эти эксперименты убедительно показывают, что вероятность обнаружения является однозначной функцией отношения сигнала к шуму, если остальные параметры качества изображения остаются постоянными.
Рис. 4.27. Вероятность обнаружения в зависимости от отношения видеосигнала к шуму
Эти результаты были обобщены на широкий класс условий с использованием концепции о пространственных и временных интегрирующих свойствах зрительного анализатора. Эффект пространственного интегрирования учитывается предположением, что глаз улучшает отношение
сигнала к шуму изображения в 
 Sоб /Sэ раз, а улучшение за счет временного интегрирования учитывается коэффициентом
Sоб /Sэ раз, а улучшение за счет временного интегрирования учитывается коэффициентом
188
Те . Тогда можно определить воспринимаемое отношение |
||
сигнала к шуму qв формулой |
|
|
qв = qэ |
Те Sоб /Sэ , |
(4.36) |
где qэ– отношение сигнала к шуму в точке изображения, т.е. в области корреляции Sэ, а
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
~2 |
f df |
|
|
|
S |
|
|
|
2 |
|
g |
2 |
|
. |
||
э |
|
|
( f )r |
|
|||||||
|
|
|
|
|
m |
|
|
||||
|
|
|
|
|
0 |
|
|
|
|
|
|
(4.37)
Розелл относит величину qэ к индикатору. Мы считаем такое обозначение неточным, поскольку речь идет об отношении сигнала к шуму, воспринимаемому визуальной системой.
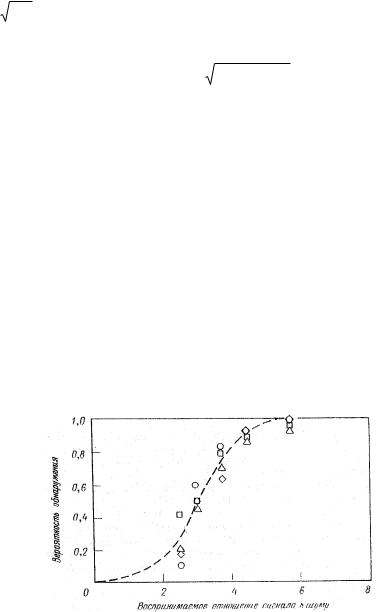
Экспериментальные данные такого рода описываются универсальной кривой, показанной на рис. 4.5 и устанавливающей связь между вероятностью обнаружения и qв. Нормализованные данные с рис. 4.27 показаны в виде точек, наложенных на теоретическую кривую рис. 4.28.
Рис. 4.28. Вероятность обнаружения прямоугольных тест-объектов в зависимости от qв
189

Эта кривая представляет интегральный закон распределения гауссовой плотности вероятности. Обозначая вероятность обнаружения Робн, как функцию через qв имеем
Робн qв |
|
|
1 |
|
qв μ |
2 |
|
2 |
|
|
|
|
|
е |
/ 2 |
d . |
(4.38) |
||||||
|
|
|
|
||||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||
|
|
2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Данные Розелла и Вильсона дают среднеквадратичное отклонение σ порядка 1 и среднюю величину порядка 3,2. Уравнение (4.38) можно сформулировать следующим образом.
Величина
Рqв
есть вероятность того, что сигнал плюс
мгновенное значение шума превышают 3,2σ. Другой смысл этой функции распределения вероятности заключается в том, что вероятность правильного обнаружения сигнала на экране индикатора равна вероятности того, что отношение сигнала к шуму равно 3,2 или больше.
Различные эквивалентные выражения для этой функции имеют вид
|
|
qв |
|
1 |
|
|
|
qв 3,2 |
|
2 |
|
|
|
|
|
|
|||||||||
Робн |
|
|
|
|
|
е |
/ 2 d , |
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
2 |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
q |
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||||
Р |
|
|
|
|
|
|
|
|
е |
|
/ 2 |
d , |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
в |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
обн |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
q |
3,2 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
1 |
q |
в |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||
Р |
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
d , |
|||||||
|
|
|
|
|
( 3,2) |
|
/ 2 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
обн |
|
|
в |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
q |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||
Р |
|
|
|
|
|
|
е |
( q |
) |
/ 2 |
d . |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
обн |
|
|
в |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
q |
3,2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.39)
(4.40)
(4.41)
(4.42)
Для qв>1 эта функция может быть аппроксимирована более простым выражением
190