

2.6.3 Идентификация падающих волн в измерительных схемах с паразитными параметрами
Решение задачи связано с определением связи напряжения Úi с компонентами вектора а падающих волн, с помощью которых по формулам (2.62), (2.66),(2.84), (2.85) находятся значения коэффициентов матриц KH0 и KH.
В идеальном случае (без учета паразитных параметров) каждое из напряжений этого вектора Úi может быть определено непосредственно при измерениях по схеме рис.2.12. Влияние паразитной индуктивности Li не позволяет реализовать эту методику.
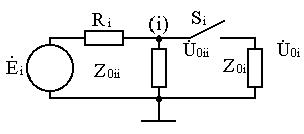
В этой связи предполагается ввести в измерительную схему специальные калибровочные меры. Для каждого из полюсов-входов измерительной схемы в общем случае должна использоваться своя калибровочная мера, представляющая собой двухполюсник с известным полным сопротивлением. Для калибровки измерительной схемы этот двухполюсник должен подключаться параллельно аттестуемому полюсу согласно схемы рис.2.27. Источник напряжения Ėi подключен к полюсу i через нагрузочное сопротивление Ri активного характера. Сопротивление Ri моделирует активную составляющую внутреннего сопротивления источника. Комплексное сопротивление Zoii моделирует входное сопротивление измерительной схемы со стороны полюса i в режиме холостого хода с учетом паразитных параметров резистора, моделирующего сопротивление Ri, в том числе и индуктивности Li. Цепь калибровки состоит из ключа S1, при замыкании которого к полюсу i подключается калиброванный двухполюсник (образцовая мера) с известным комплексным сопротивлением Zoi.
При разомкнутом ключе S1 (рис.2.27) регистрируется напряжение холостого хода Úoii при условиях, которые полностью соответствуют условиям измерения по схеме рис.2.25. При замкнутом ключе S1 регистрируется напряжение Úoi.
Согласно теории электрических цепей по параметрам схемы рис.2.27 эти напряжения могут быть вычислены по формулам:
Ú 0ii = ĖiZ0ii/(Ri +Z0ii); (2.90)
Ú0i = ĖiZ0ii/(Ri +Z0ii +RiZ0ii /Z0i). (2.91)
Рис. 2.27. Калибровка входа i
|
|
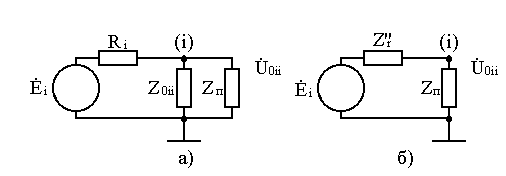
Рис. 2.28. Измерение напряжения Úoii: а - полная схема; б - эквивалентная схема |

Пусть полюсный коэффициент калибровки определен выражением:
Ki = Ú0ii/Ú0i –1. (2.92) |
Тогда с учетом выражений (2.90) и (2.91) получим:
Ki =RiZ0ii / Z0i (Ri +Z0ii ), (2.93) |
а из выражения (2.92) находим:
Z0ii =KiZ0iRi /(Ri – KiZ0i). (2.94) |
|
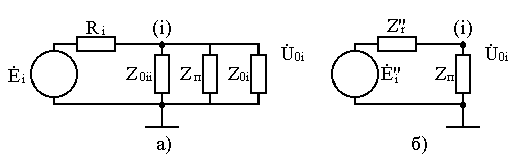
Рис. 2.29. Измерение напряжения Úoi: а – полная схема; б - эквивалентная схема |
Согласно теории матриц рассеяния диагональный коэффициент Soii матрицы рассеяния холостого хода So для схемы рис.2.27 может быть вычислена по формуле:
Soii=(2Z0ii/(Ri +Z0ii)) –1 (2.95) |
или с учетом коэффициента передачи холостого хода - по формуле
Soii =KH0ii –1. (2.96) |
Приравнивая правые части выражений (2.95) и (2.96) находим:
KH0ii =2Z0ii/(Ri +Z0ii). (2.97) |
Подставляя значение Zoii из выражения (2.94) в формулу (2.97) получаем:
KH0ii =2KiZ0i/Ri. (2.98) |
Для определения напряжений Úi приравниваем правые части уравнений (2.84) и (2.98) и решаем полученное уравнение относительно Úi. Тогда:
Úi = Ú0ii(Ri / 2KiZ0i). (2.99) |
Подставляя значение напряжения Úi из формулы (2.99) в формулу (2.85) после элементарных преобразований получаем:
KH0ji =2Ú0jiKiZ0i/Ú0ii(RiRj)½. (2.100) |
Формулы (2.58) и (2.100) позволяют вычислить значения коэффициентов нормированной матрицы холостого хода KH0 с точностью до нормирующего множителя (RiRj)½ . Заметим, что формула (2.98), по существу, является производной от формулы (2.100), так как эту формулу можно получить из формулы (2.100) при равенстве индексов i=j, когда Úii=Úji и Ri=Rj.
Элементы нормированной матрицы передачи KH, определяемые на основании опытов по измерению полюсных напряжений при подключении исследуемого многополюсника (рис.2.25), в данном случае можно рассчитать по формуле:

KHji =2ÚjiKiZ0i/Ú0ii(RiRj)½ при i=1,n; j =1,n, (2.101) |
которую получаем в результате подстановки выражения для напряжения Úi из формулы (2.99) в формулу (2.85).