

2.6.2. Определение y-матриц с учетом искажений
Если индуктивность Li нагрузочного резистора несущественна, т.е. выполняется условие:
Ri »ω Li, (2.83) |
то определение матриц Yc и Y0 может быть произведено способом, рассмотренным в п.2.4.2 [43]. В этом случае определяют матрицы KH0 и KH передачи холостого хода и рабочего нагруженного режима.
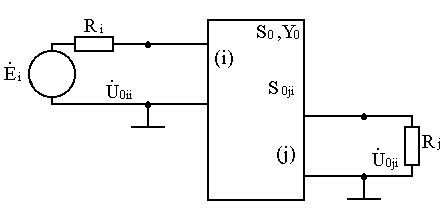
Для определения матрицы KH0 нужно определить матрицу U0 напряжений холостого хода по схеме рис.2.25, когда измеряемый многополюсник от схемы отключен и ее нагрузкой является "паразитный" многополюсник с матрицей Y0. В результате n2 измерений, где n - число входов-полюсов, определяют Uoii диагональные и Uoji недиагональные элементы матрицы U0.
В результате тестов по схеме рис.2.25 определяется n компонент вектора a падающих волн, которые представляют Úi напряжения на входах, нагруженными на сопротивления Ri.
Расчет диагональных K0Hii элементов матрицы KH0 производится по формуле
K0Hii =Ú0ii/Úi , (2.84) |
а недиагональных - по формуле
K0Hji =Ú0ji/Úi(Ri/Rj)½ . (2.85) |
|
Рис. 2.25. Измерительная схема в режиме холостого хода
|


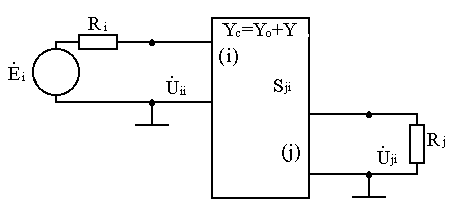
Чтобы определить матрицу KH к контактам схемы рис.2.25 подключают измеряемый многополюсник. В результате в измерительные цепи оказывается включенным многополюсник с матрицей проводимости Yc (рис.2.26). В результате n2 измерений определяют Úii диагональные и Úji недиагональные элементы матрицы U.
|
Рис. 2.26. Измерительная схема в нагруженном режиме |
Расчет диагональных KHii элементов матрицы KH производится по формуле (2.59), а недиагональных по формуле (2.62). С учетом формулы (2.66) получаем:
Y0H=2(KH0)-1 –1, (2.86) |
YCH=2(KH)-1 –1. (2.87) |
Подставляя выражения (2.86) и (2.87) в формулу (2.82), получаем основное уравнение измерительной цепи, а именно матричную формулу для расчета Y- матрицы измеряемого многополюсника.
YH=2[(KH)-1-(KH0)-1]. (2.88) |
Из уравнения (2.88) и операций, выполненных в процессе его определения, непосредственно вытекают следующие выводы:
Имеется возможность определения влияния паразитных параметров измерительных цепей на результаты измерения Y матриц многополюсников; при этом учитываются систематические погрешности, вносимые паразитными емкостями, которые образуют монтажные проводники измерительной схемы.
Информацию достаточную для определения Y- матрицы измеряемого многополюсника содержат матрица U0 напряжений холостого хода, матрица U напряжений нагруженного режима, вектор a падающих волн и вектор R сопротивлений нагрузочных резисторов, причем для идентификации Y- матрицы необходимо выполнить 2n2+n тестов по определению модулей и разностей фаз переменных напряжений, в том числе n2+n тестов проводятся в процессе калибровки измерительной схемы при определении матрицы U0 и вектора a.
Учет влияния полюсных Cii и взаимных Cji емкостей производится при использовании чисто активных нагрузок, которые также выполняют функции эталонных мер, т.е. должны быть откалиброваны.
Для использования реальных нагрузок, обладающих паразитными параметрами, необходимы дополнительные меры для калибровки измерительной схемы.
При определении Y-матрицы многополюсника по формуле (2.88) матрица KH0 определяет влияние паразитных параметров, при измерении партии однотипных радиоэлементов необходимую и достаточную информацию для идентификации их Y-матриц несут n2 элементов матрицы U рабочих напряжений.
Измерение элементов матриц U и U0 и вектора a не связано с выполнением каких-либо подстроечных операций, что открывает возможности для комплексной автоматизации процесса измерения.
7. При определении Y-матрицы многополюсника по формуле (2.88) и при расчетах компонент матриц KH0 и KH по формулам (2.62), (2.66) и (2.84), (2.85) не приняты во внимание искажения, вносимые Zп входным сопротивлением измерительного прибора, т.е. полагается выполнение условия:
|ZП| »Rimax, (2.89) |
где Rimax - максимальное сопротивление компонент вектора R; если условие (2.89) не соблюдается, необходимы мероприятия по учету влияния ZП.