

2.7. Параметры управления моделированием
Для
открытия диалогового окна SIMULATION
CONTROL щелкните по кнопке
![]() Simulation Control.
Щелчком по кнопке
Simulation Control.
Щелчком по кнопке
![]() можно
проконтролировать время моделирования.
Проверите, что Номер Начального Шага
установлен на -1.
можно
проконтролировать время моделирования.
Проверите, что Номер Начального Шага
установлен на -1.
Отрицательный признак указывает на то, что это шаг, который создан Пре-процессором (шаги решения записываются в базу данных в течение моделирования). Установите значение Числа Шагов Моделирования на 20. Если преждевременно происходили остановы моделирования, то программа не выполнит 20 шагов. Для решения этой проблемы установите величину Приращения Шага, равную 2. Через каждую секунду очередной шаг моделирования будет добавлен в базу данных.
Обратите внимание, что Первый Инструмент, так же отобразится в этом окне. Мы предварительно установили, что первый инструмент является Верхним инструментом, и инструментом, положение которого будет использоваться для остановки процесса и контроля шага.
Теперь
необходимо определить соответствующую
Чтобы
определить эту величину, можно использовать
инструмент Мера
![]() .
.
Щелкните
по кнопке
и затем измерьте длину любого длина
края на объекте Block
(Вам, вероятно, придется щелкнуть
![]() ,
чтобы рассмотреть теневое представление).
Типичная длина края составляет
приблизительно 0.4». Одна треть от 0.4» –
приблизительно составит 0.13». Согласно
Определению Шагов Решения, введите
значение 0,13. Щелкните по кнопке
,
чтобы рассмотреть теневое представление).
Типичная длина края составляет
приблизительно 0.4». Одна треть от 0.4» –
приблизительно составит 0.13». Согласно
Определению Шагов Решения, введите
значение 0,13. Щелкните по кнопке
![]() ,
когда завершите и закройте окно SIMULATION
CONTROL.
,
когда завершите и закройте окно SIMULATION
CONTROL.
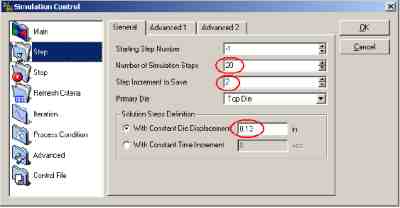
Рис. 10. Диалог настройки задачи
2.8. Позиционирование объектов
Откройте
окно OBJECT POSITIONING, щелкнув по кнопке
![]() станут доступны следующие различные
методы позиционирования Deform-3D:
станут доступны следующие различные
методы позиционирования Deform-3D:
Таблица 6
Методы позиционирования
Кнопки |
Описание |
|
Объекты могут быть установлены с помощью мыши перетаскиванием их по ОКНУ ЭКРАНА ДИСПЛЕЯ |
|
Объекты могут быть размещены в определенном направлении, они будут перемещаться и вращаться, до тех пор, пока не остановятся в состоянии равновесия относительно других объектов. Гравитационное позиционирование используют в том случае, когда для исходной позиции объекта неоднозначно указаны тип урегулирования положения на имеющий форму впадины поверхности |
|
Объекты могут быть перемещены на определенное расстояние любым заданным вектором или с помощью определения точек начала и конца перемещения |
|
При интерференционном позиционировании, размещаемый объект будет перемещаться так, чтобы он немного пересекал другой объект |
|
Объекты могут вращаться по заданному углу относительно любой оси |
|
Регулируемое позиционирование подобно гравитационному и используется в случае, если начальное положение объекта несколько неточно определено. Гравитационное позиционирование, однако, является новым методом позиционирования, который имеет тенденцию к получению лучших результатов в большинство случаев |