

2.3 Параметрична оптимізація системи
Параметрична оптимізація розробленої стійкої АСР полягає в знаходженні оптимальних параметрів настройки регулятора, що забезпечує найкраще значення прямих показників якості перехідного процесу або оптимальне значення критерія якості при дотриманні відповідних обмежень.
Залежно від поставленої перед АСР мети показниками якості можуть бути: час регулювання та ін.; в якості критеріїв якості обираються інтегральні (поліпшені інтегральні) оцінки, а також ступінь фільтрації збурень, що діють на процес тощо. Обмеженнями, що накладаються на процес, є, як правило, показники: динамічна похибка, ступінь затухання перехідного процесу та ін., які визначають запас стійкості АСР.
Параметрична оптимізація АСР може здійснюватися математичним моделюванням на ПЕОМ з використанням частотних або розширених частотних характеристик системи тощо. Основні методи, використовувані в інженерній практиці, наведені в працях.
Якщо в найпростішій стійкій АСР не вдається досягнути потрібної якості процесу регулювання за всіх допустимих значеннях параметрів її настройки, переходять до більш складних АСР (аналогічно п.2.2). Робота вважається завершеною після того, як розроблена АСР буде повністю задовольняти поставленим вимогам.
Експериментальні методи визначення оптимальних параметрів настройки регуляторів
Ці методи засновані на прямому контролі перехідних процесів в АСР в процесі підбору оптимальних параметрів настройки регулятора. Спочатку регулятор вмикають в роботу з довільними параметрами настройки, які забезпечують стійку роботу АСР. Після цього наносять збурення та спостерігають реакцію системи на ці збурення. Цілеспрямовано змінюючи параметри настройки регулятора за наперед відомим алгоритмом, домагаються потрібного виду перехідного процесу.
Зазвичай це багатокрокова ітераційна процедура, тому ці методи часто називають ітераційними.
Метод Циглера-Ніколса
Замкнену АСР з П-регулятором (або ПІ-регулятором, перетвореним в П-регулятор за рахунок встановлення нескінчено великого значення Тінт) шляхом поступового збільшення Кр виводять на межу стійкості. Для цього режиму визначають Кр.кр та Ткр – період автоколивань, за якими розраховують оптимальні параметри настройки регулятора.
Для П-регулятора
Кр.опт = 0,55Кр.кр
Для ПІ-регулятора
Кр.опт = 0,35Кр.кр; Тінт.опт = 1,25Тр.кр
Метод простий, дозволяє забезпечити в системі заданий запас стійкості, але не гарантує екстремуму показника якості регулювання (може не відповідати показникам якості перехідного процесу, які задані у вихідних даних).
Після визначення Кр.опт, Тінт.опт їх значення підставимо в досліджувану САР з ПІ-регулятором та отримаємо перехідний процес. Необхідно оцінити його стійкість і якість.
У випадку, якщо процес виявиться нестійким або прямі показники якості перехідних процесів не будуть відповідати допустимі значенням, слід провести коригування налаштувань регулятора вручну.
Будуємо в Simulink структурну схему системи з ПІ-регулятором. ПІ-регулятор імітуємо: П-складову звичайною підсилювальною ланкою, а І-складову послідовно підключеними підсилювальною та інтегральною ланкою, в І-складовій можна змінювати Кі лише в підсилювальній ланці, в інтегральній змінювати нічого не треба. Час перегляду ставимо 500 с. . А також в ланках Step встановлюємо: для сигналу U1 та U3 встановлюємо налаштування Final Value = 10 ºС, а для сигналу Z1 встановлюємо налаштування Final Value = 40 ºС та Z2 – Final Value = 15 ºС .
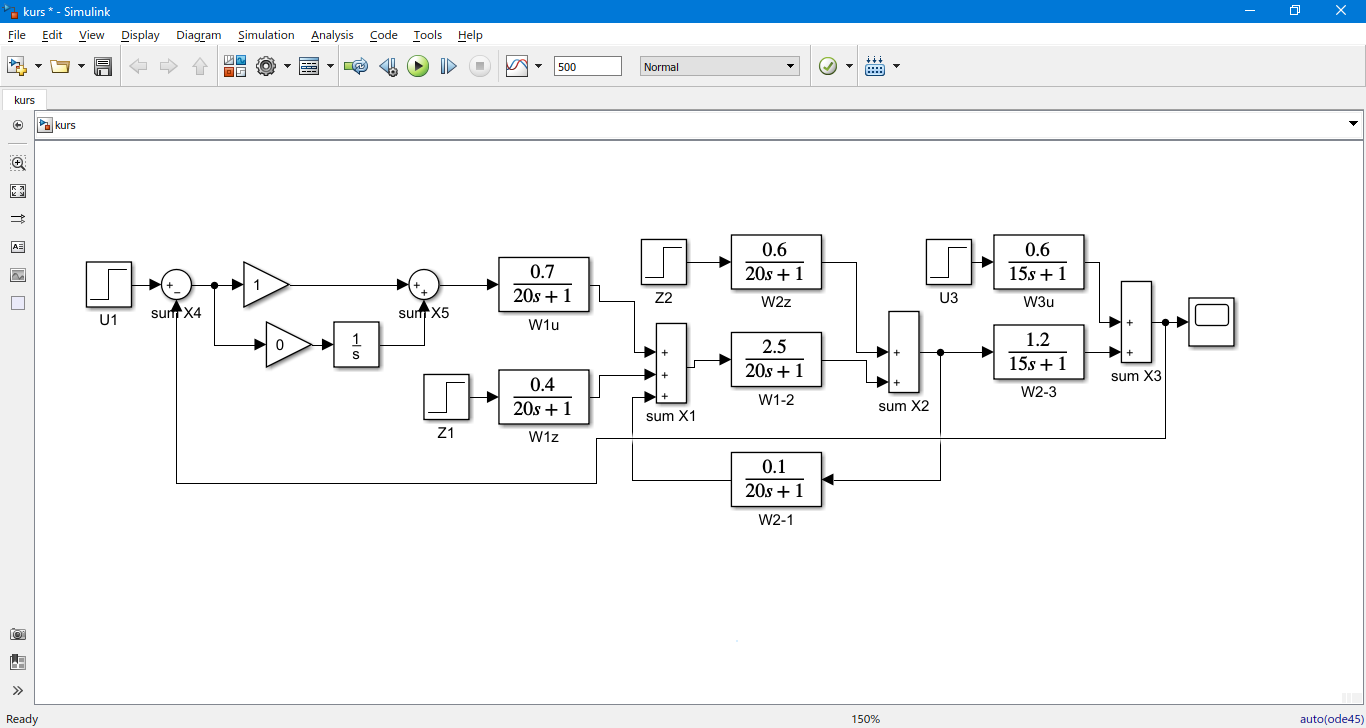
Рисунок 2.5 – Структурна схема одноконтурної АСР з ПІ-регулятором
Для виведення системи на межу стійкості (перехідний процес буде мати вигляд автоколивань поступово збільшуємо налаштування Кр, при цьому встановити Кі=0.
При Кр.кр.=3,5%ХРО/ºС система виходить на межу стійкості, що підтверджується перехідним процесом на рисунку 2.6.
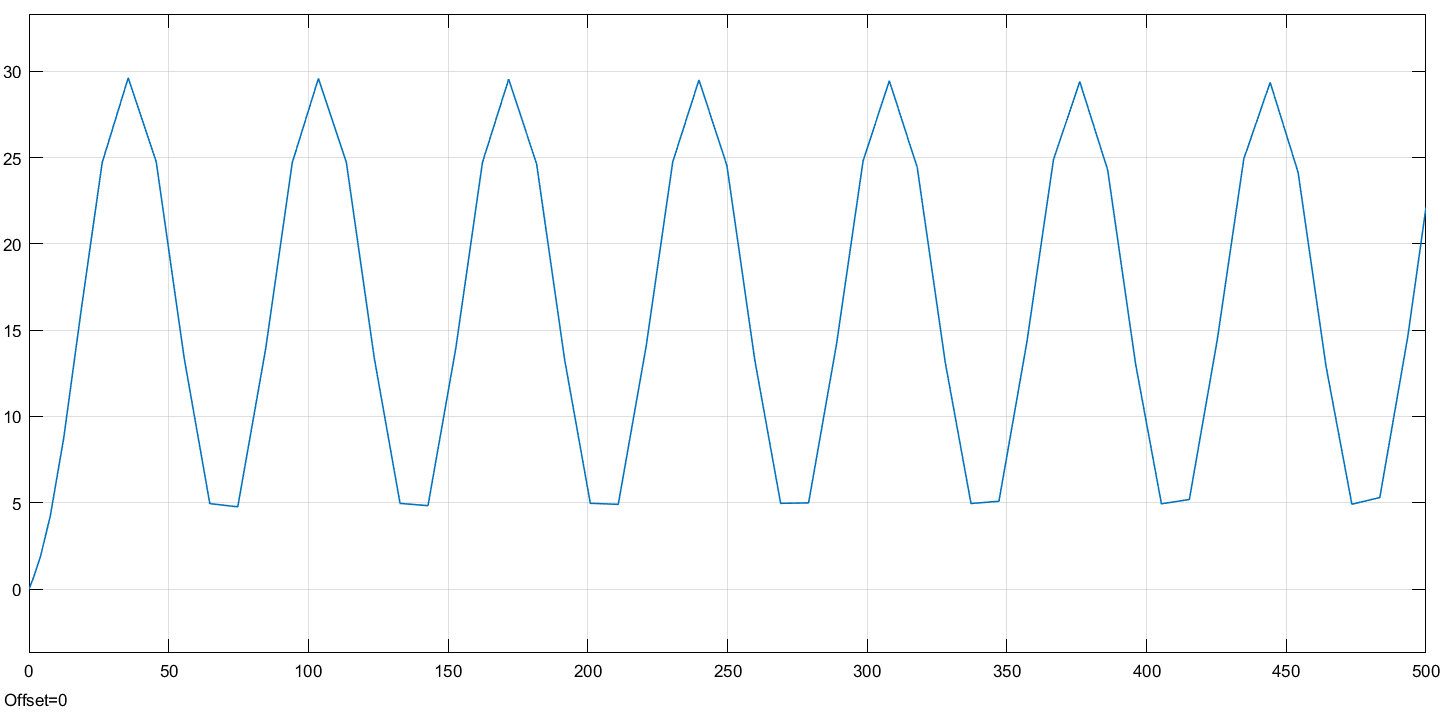
Рисунок 2.6 – Перехідний процес САР з Кр.кр.=3,7%ХРО/ºС; Кі=0 %ХРО/(ºС*с) відносно зміни завдання
Впевнившись, що система на межі стійкості, встановимо час перегляду 200 с і визначимо Ткр (рис. 2.7).
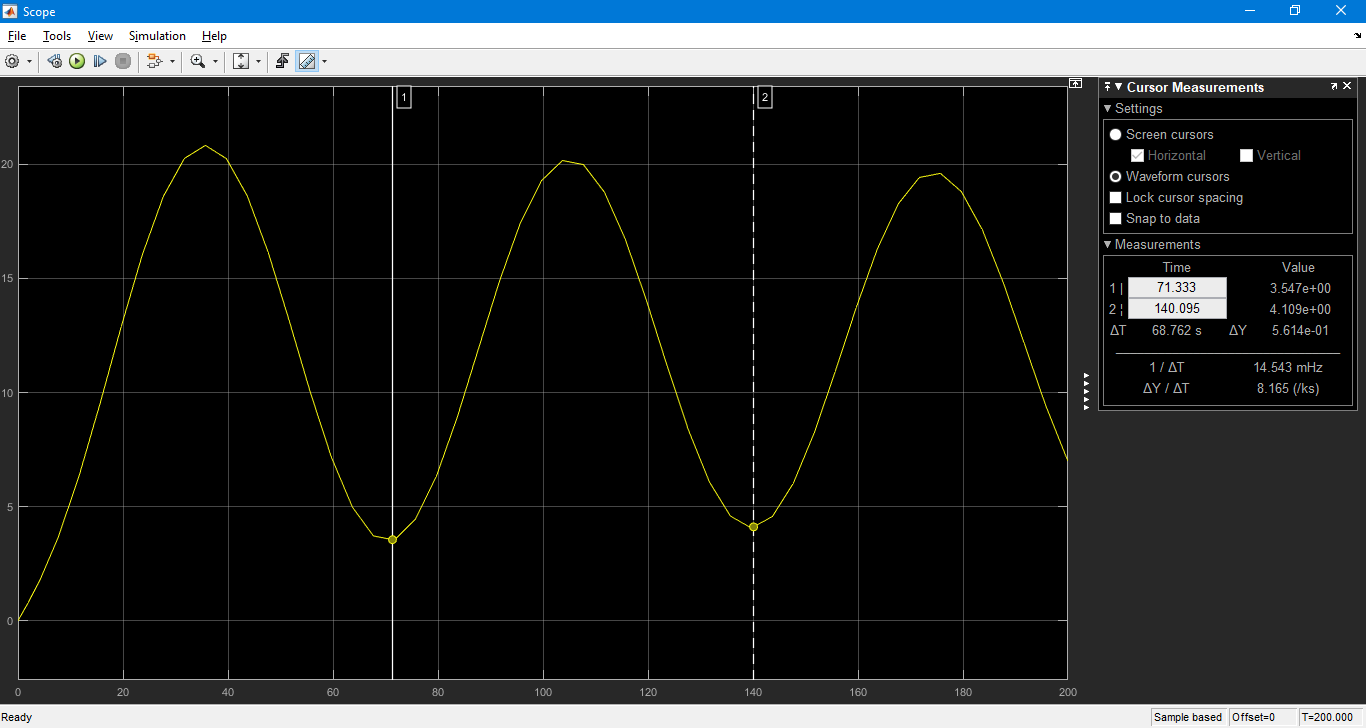
Рисунок 2.7 – Визначення Ткр на перехідному процесі
Ткр = 140 - 71.1 = 68.9 с
Підставимо Кр.кр та Ткр і отримаємо:
Кр.опт = 0,35*3,7=1,295%ХРО/ºС;
Тінт.опт = 1,25*68,9=86,125 с
Для проведення імітації розрахуємо
Кі.опт = Кр / Тінт = 1,295 / 86,125 = 0,01504 %ХРО/(ºС*с)
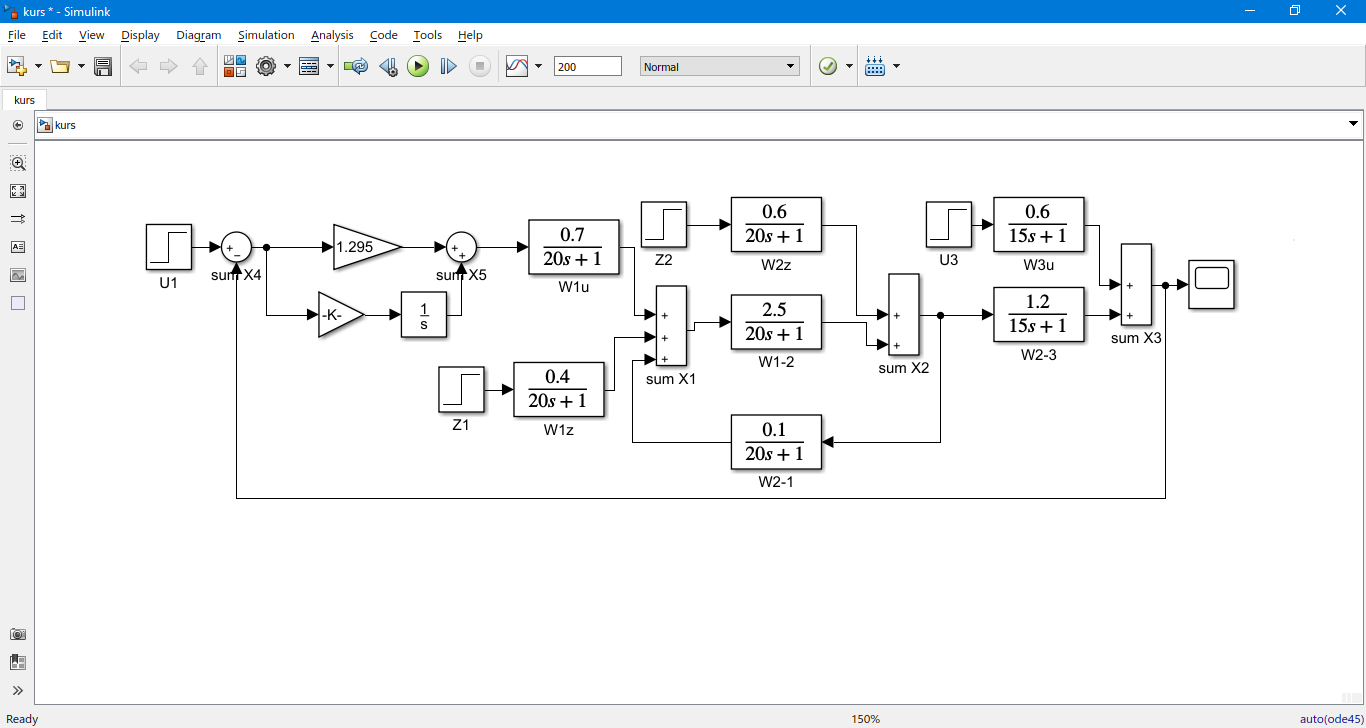
Рисунок 2.8 – Структурна схема одноконтурної АСР з ПІ-регулятором з Кр.опт і Кі.опт

Рисунок 2.9 – Перехідний процес САР з Кр.опт. = 1,295%ХРО/ºС; Кі.опт = 0,01504%ХРО/(ºС*с) відносно зміни завдання
Розрахуємо прямі показники якості перехідного процесу (рис. 2.9).
Динамічна похибка А1= 35,4-10=25,4 ºС;
Статична похибка ∆Хст = 0ºС (що характерно для САР з ПІ-регулятором)
Час регулювання tрег = 500 с
Перерегулювання

 –
значення не входить в допустимі межі.
–
значення не входить в допустимі межі.
Степінь затухання
 0.68,
0.68,
0.75 –
значення не задовольняє вимоги.
–
значення не задовольняє вимоги.
Отже необхідно вручну провести підстройку ПІ-регулятора для забезпечення заданих показників якості процесу керування.
Після проведення підстройки ПІ-регулятора були отримані такі значення Кр=1.133; Кі=0,0224 і був отриманий такий перехідний процес.
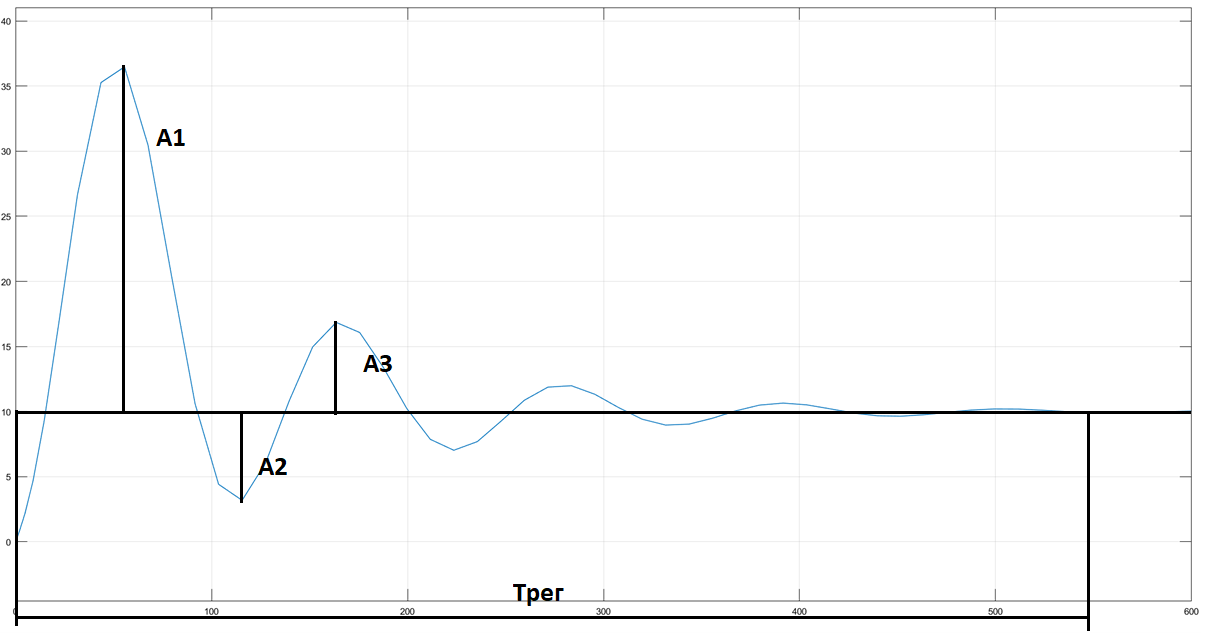
Рисунок 2.10 – Перехідний процес САР з Кр.опт. = 1,133%ХРО/ºС; Кі.опт = 0,0224%ХРО/(ºС*с)
Розрахуємо прямі показники якості перехідного процесу (рис. 2.10).
Динамічна похибка А1= 36,47-10=26,47 ºС;
Статична похибка ∆Хст = 0ºС (що характерно для САР з ПІ-регулятором)
Час регулювання tрег = 550 с
Перерегулювання

– значення входить в допустимі межі.
Степінь затухання
 0.75,
0.75,
0.75 – значення задовольняє вимоги.