

Дослідження об’єкта регулювання
Об’єкт вважається заданим, якщо відомо або може бути виведеним на основі вихідних даних його диференціальне рівняння або передаточна функція. Також має бути заданим вид, максимальне значення та місце прикладення збурювальних діянь. Якщо місце прикладення збурення не задане, вважається, що воно прикладене до точки прикладення керувального діяння.
Під час виконання даної роботи порядок диференціального рівняння об’єкта (число ємностей) не повинен бути вище третього. У випадку завдання одноємнісного об’єкта він повинен мати транспортне запізнювання.
В даних методичних вказівках об’єкт задається у вигляді системи диференціальних рівнянь:
 (1.1)
(1.1)
де індекси
 відповідно відносяться до першої, другої
та третьої ємностей;
відповідно відносяться до першої, другої
та третьої ємностей;
 – стала часу
– стала часу
 -тої
ємності;
-тої
ємності;
 –
відхилення вихідної величини
-тої
ємності від початкового (нульового або
заданого) значення;
–
відхилення вихідної величини
-тої
ємності від початкового (нульового або
заданого) значення;
 –
коефіцієнт передачі
-тої
ємності за каналом управління;
–
коефіцієнт передачі
-тої
ємності за каналом управління;
 –
коефіцієнт передачі
-тої
ємності за каналом збурення;
–
коефіцієнт передачі
-тої
ємності за каналом збурення;
 –
коефіцієнт передачі відповідно від
наступної ємності до попередньої
(зворотний зв’язок) та від попередньої
до наступної ємності (прямий канал),
–
коефіцієнт передачі відповідно від
наступної ємності до попередньої
(зворотний зв’язок) та від попередньої
до наступної ємності (прямий канал),
 – час, с.
– час, с.
Числові значення згідно варіанту:
Т1 |
Т2 |
Т3 |
К1u |
K2u |
K3u |
K1z |
K2z |
K3z |
K1-2 |
K2-1 |
K2-3 |
K3-2 |
Z1 |
Z2 |
Z3 |
20 |
20 |
15 |
0,7 |
0 |
0,6 |
0,4 |
0,6 |
0 |
2,5 |
0,1 |
1,2 |
0 |
40 |
15 |
0 |
 (1.2)
(1.2)
Аналіз властивостей об’єкта. Визначення еквівалентних передаточних функцій
Аналіз властивостей об’єкта регулювання полягає у визначенні його статичних та динамічних характеристик за каналами керувальних та збурювальних діянь.
Для проведення зазначеного вище аналізу потрібно вивести передаточні функції кожної ємності заданого об’єкту за каналами різних діянь, скласти структурну схему об’єкта та визначити його еквівалентні передаточні функції за каналами упраління та збурень. За потреби виконуються структурні перетворення (перенесення суматорів, точок, визначення внутрішніх еквівалентних зворотних зв’язків, перетворення тощо), в результаті чого структурна схема зводиться до еквівалентної однолінійної.
Потрібно визначити передаточні функції за каналами управлінь U1 і U3 та збурень Z1 та Z2 відповідно:
Wz1=
 Wz2=
Wz2=
 (1.3)
(1.3)
Wu1=
 Wu3=
Wu3=
 (1.4)
(1.4)
Запишемо систему рівнянь в операторному вигляді, враховуючи нульові початкові умови та підставивши числові значення коефіцієнтів та сталих часу.
Система набуває вигляду:
(20p+1 )* X1(p)
= 0,7*
U1(p)+0,4*
Z1(p)+0,1*
X2(p);
X1(p)
= 0,7*
U1(p)+0,4*
Z1(p)+0,1*
X2(p);
(20p+1 )* X2(p) = 0,6* Z2(p)+2,5* X1(p); (1.5)
(15p+1 )* X3(p) = 0,6* U3(p) + 1.2* X2(p);
Визначимо передаточні функції для різних ємностей:



Складаємо структурну схему об’єкта
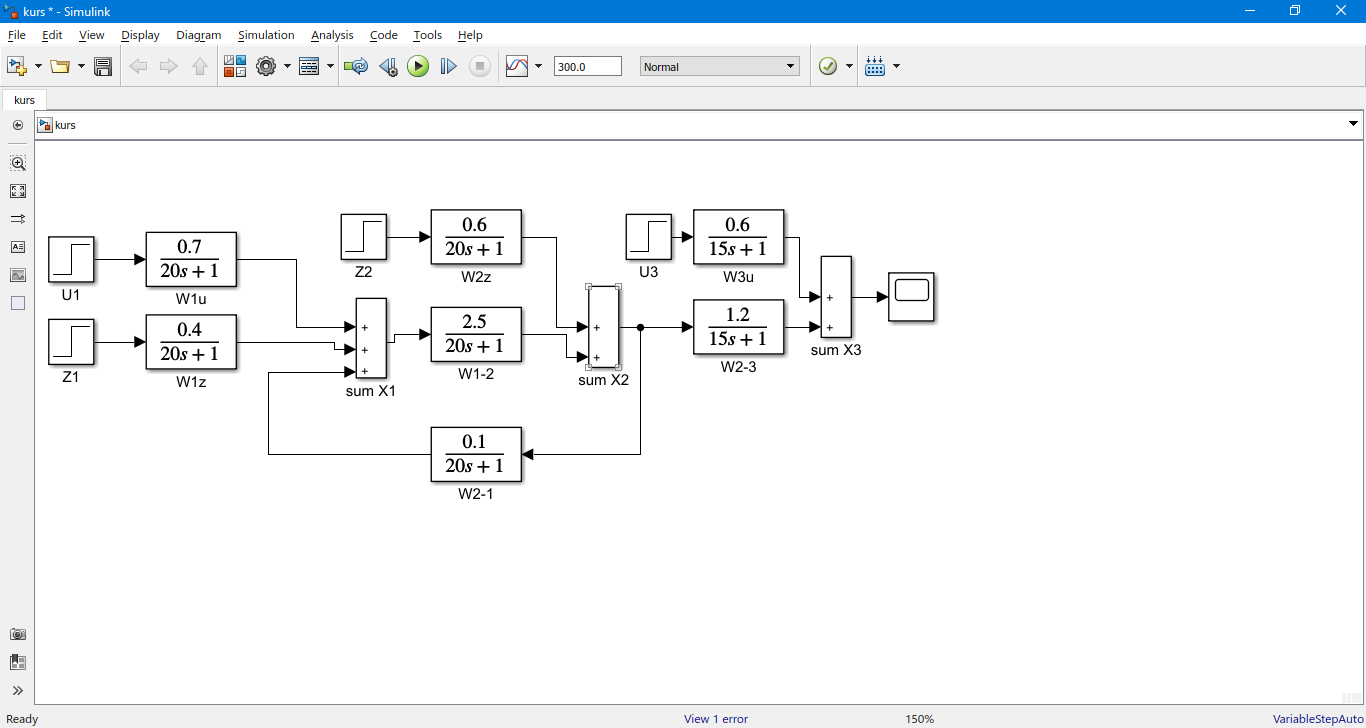
Рисунок 1.1 – Структурна схема об’єкта
За виглядом структурної схеми визначаємо еквівалентні передаточні функції.
за каналом управління U1:
 (1.6)
(1.6)

за каналом збурення Z1:
 (1.7)
(1.7)

за каналом збурення Z2:
 (1.8)
(1.8)

за каналом управління U3:
 (1.9)
(1.9)
Зведемо отримані передаточні функції до робочого вигляду таким чином, щоб у знаменнику отримати вільний член рівний одиниці (ділимо чисельник і знаменник на 0,75).
 (1.10)
(1.10)
 (1.11)
(1.11)
 (1.12)
(1.12)
 (1.13)
(1.13)
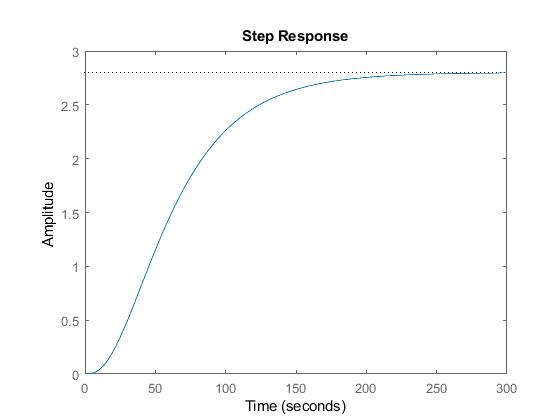
Рисунок 1.2 – Крива розгону по каналу управління U1
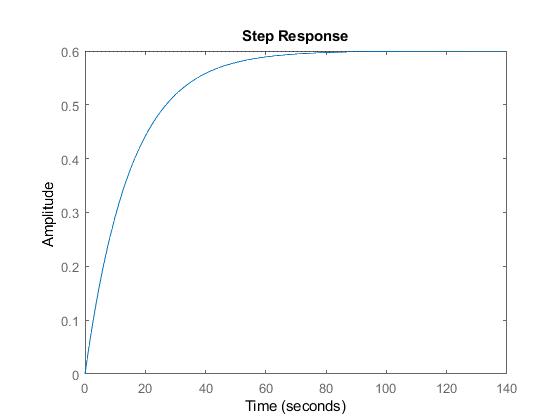
Рисунок 1.3 – Крива розгону по каналу управління U3
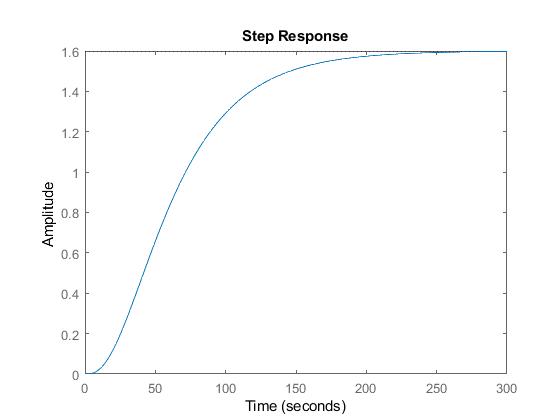
Рисунок 1.4 – Крива розгону по каналу збурення Z1
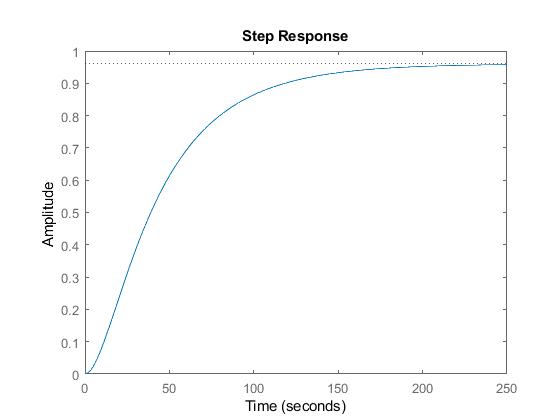
Рисунок 1.5 – Крива розгону по каналу збурення Z3