

2.2 Аналіз стійкості системи
Розроблена САР в першу чергу має бути перевіреною на стійкість. Найбільше росповсюдження для перевірки стійкості отримали алгебраїчний критерій стійкості Рауса-Гурвиця та частотний критерій Найквіста.
Коефіцієнт передачі П-регулятора Кр>5,2
У відповідності до критерія Гурвиця
потрібно скласти визначник Гурвиця за
характеристичним рівнянням замкненої
системи
 за
каналом управління із розрахованим у
прикладі 3.1 коефіцієнтом передачі
за
каналом управління із розрахованим у
прикладі 3.1 коефіцієнтом передачі :
:


Складаємо визначник Гурвиця:

Звідси діагональні мінори:
 ;
;
 ;
;
Робимо висновок, що відповідно до критерія Гурвиця замкнена система є нестійкою.
Визначення стійкості замкненої САР, яка складається з об’єкта, описаного системою рівнянь та П-регулятора з коефіцієнтом передачі Kp 5,2 %ХРО/С за допомогою MatLab:
w=tf([14.68],[8000 1333.3 68.33 15.68])
w =
14.68
-------------------------------------
8000 s^3 + 1333 s^2 + 68.33 s + 15.68
Continuous-time transfer function.
>> sys=ss(w)
sys =
A =
x1 x2 x3
x1 -0.1667 -0.06833 -0.1254
x2 0.125 0 0
x3 0 0.125 0
B =
u1
x1 0.25
x2 0
x3 0
C =
x1 x2 x3
y1 0 0 0.4698
D =
u1
y1 0
D3=det([1333.3 15.68 0; 8000 68.33 0; 0 1333.3 15.68])
D3 =
-5.3838e+05
>> D2=det([1333.3 15.68 ; 8000 68.33])
D2 =
-3.4336e+04
Оскільки детермінанти третього і другого порядку менше нуля, то система нестійка.
Стійкість системи необхідно підтвердити моделюванням в Simulink. В схему ОК додаємо П-регулятор. Встановлюємо в ньому розраховане значення налаштування регулятора Кр=5,2%XPO/oC.
Для перевірки отриманих результатів побудуємо структурну схему. П-регулятор імітуємо звичайною підсилювальною ланкою. Час перегляду ставимо 500 с. А також в ланках Step встановлюємо: для сигналу U1 та U3 встановлюємо налаштування Final Value = 10 ºС, а для сигналу Z1 встановлюємо налаштування Final Value = 40 ºС та Z2 – Final Value = 15 ºС .
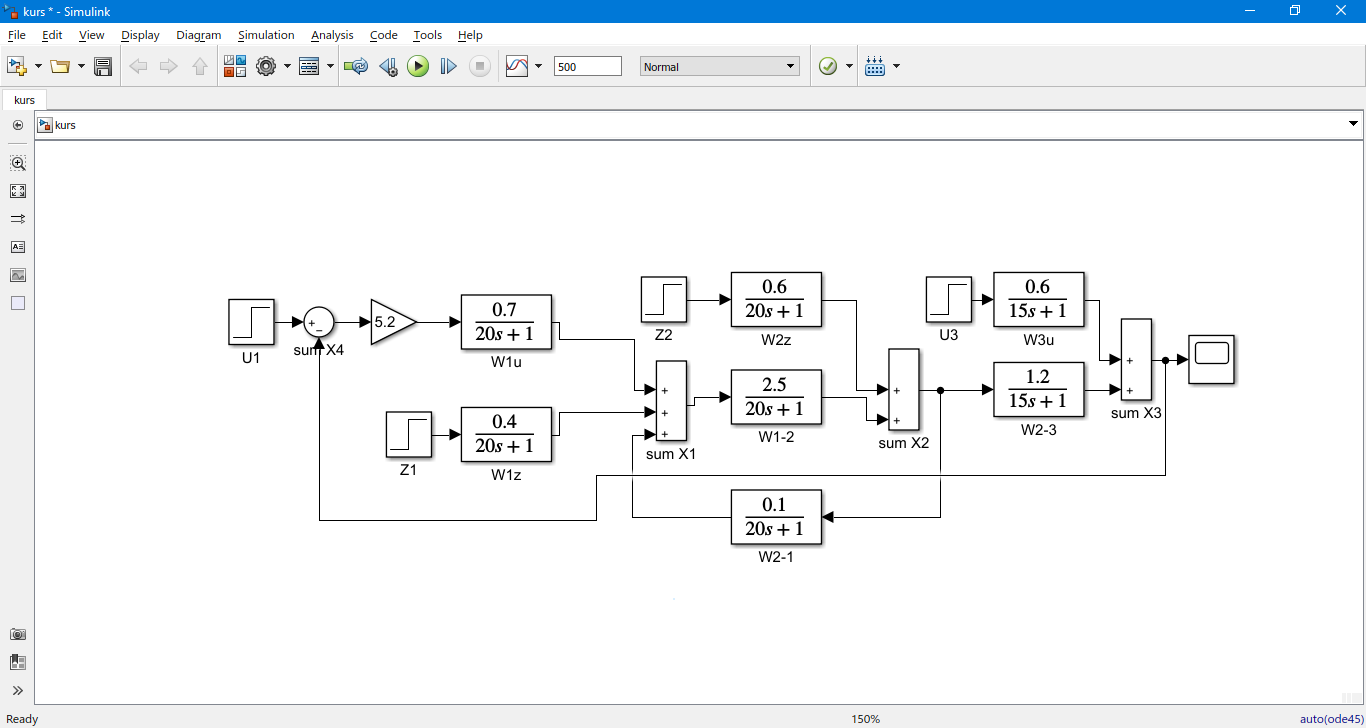
Рисунок 2.2 – Структурна схема системи з П-регулятором

Рисунок 2.3 – Розбіжний перехідний процес системи з П-регулятором
Дана система є нестійкою і статична похибка 5% є недопустимою, що підтверджується розбіжним перехідним процесом і критерієм Рауса-Гурвиця оскільки детермінанти третього і другого порядку менше нуля.
Як спеціальне завдання було отримано, дослідження системи за допомогою критерія стійкості Найквіста.
Частотний критерій стійкості Найквіста використовує амплітуднофазову характеристику розімкненої системи Wроз(jω) = Wрег(jω), Wок(jω) , тобто послідовне з’єднання (добуток) відповідних характеристик і передаточних функцій автоматичного регулятора і об’єкта за каналом керування. Критерій Найквіста формулюється так: автоматична система керування стійка, якщо амплітудно-фазова характеристика розімкненої системи W(jω) роз не охоплює точку з координатами (-1; j0) на комплексній площині.
Визначаємо передаточну
функцію розімкнутої системи
 :
:


Проводимо заміну в передаточній функції p → jω і отримуємо аналітичний вираз для амплітудно-фазової характеристики

Модуль цього виразу дорівнює

а фаза визначається, як аргумент цього виразу:

Умовою перетину годографом АФХ дійсної осі є виконання рівності, яка випливає з рівняння:
Дана умова виконується при додатних
частотах
та

Уявна вісь перетинається годографом АФХ за додатної частоти, яка визначається з рівності:
.
.
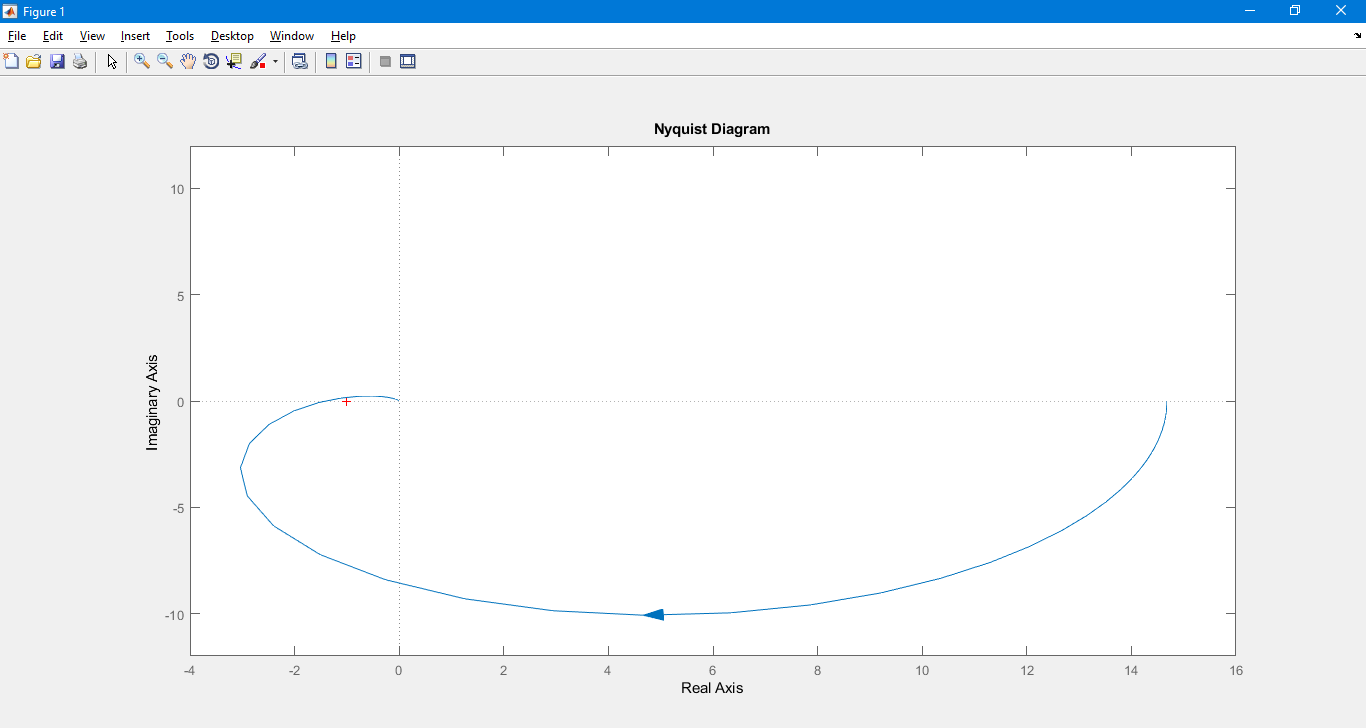
Рисунок 2.4 – Годограф розімкненої АСР
Висновок: так як охоплює точку з координатами (-1; j0 ). Можна зробити висновок, що система в замкненому стані нестійка.
У випадку, коли статична похибка неприпустима, створюється системи стабілізації (використовується регулятор з астатичною складовою – ПІ- або ПІД-регулятор). В даній курсовій роботі створюється система стабілізації.