

Методические основы совершенств. транспортных связей в предприя
.pdf101
4. РАСПРЕДЕЛЕНИЕ ЭЛЕМЕНТОВ ТРАНСПОРТНЫХ ПОТОКОВ ЛЕСОМАТЕРИАЛОВ ПО АВТОМОБИЛЬНЫМ ДОРОГАМ
4.1. Определение параметров движения транспортных потоков лесоматериалов по сети лесовозных дорог
Лесотранспортный поток, как правило, состоит из отдельно взятых лесо-
возных автопоездов, для которых достаточно трудно получить достоверные данные о параметрах, устанавливающих характеристики транспортного про-
цесса. При сборе и обработке данных по различным параметрам транспортных потоков интенсивность потока автопоездов определяется с помощью детекто-
ров транспорта, определяющих, например, изменение напряженности магнит-
ного потока, интенсивности звукового или светового потоков при прохождении лесовозных автопоездов. Тогда как такие параметры, как фиксированная ско-
рость, плотность транспортного потока и длина очереди являются случайными величинами, и их определение вызывает наибольшую трудность. Все данные о характеристиках лесотранспортных потоков носят вероятностный характер, по-
этому в существующих методах сначала путем натурного эксперимента произ-
водят измерения в конкретном временном интервале, а потом методами стати-
стического анализа обобщают полученные результаты. Такой подход применим только для конкретной местности, в которой производился натурный экспери-
мент по определению вышеобозначенных параметров. Подчекнем, что органи-
зация управления транспортными потоками лесоматериалов в силу уникально-
сти и специфичности условий транспортировки также уникальна и специфична.
Возникают проблемные вопросы разработки методики организации транспорт-
но-грузовых процессов в лесном комплексе.
Будем использовать понятия «экспоненциального сглаживания» и «регрес-
сионного прогнозирования» для статистической обработки данных [30], а для определения интенсивности потоков – показания, снимаемые с регистраторов движения. Введем в рассмотрение дополнительный параметр – плотность рас-
102
пределения лесотранспортного потока (в дальнейшем – плотность). Как показа-
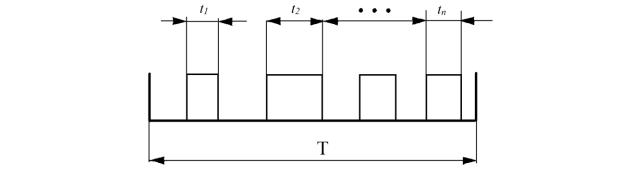
но на рис. 4.1, примем, что при прохождении лесовозного автопоезда (ЛА) в за-
данной точке дороги формируются данные, определяющие его плотность. Эти данные фиксируются приборами регистрации (ультразвуковыми, регистрато-
рами движения и т. д.). Обозначим как ti время прохождения i-го сигнала, а T –
период прохождения n сигналов, тогда очередность прохождения транспорта О выражается:
|
n |
|
|
|
ti |
|
|
О |
i 1 |
. |
(4.1) |
|
|||
|
T |
|
|
Введем обозначения: z – протяженность дороги с присутствием n автомо-
билей, v – их средняя скорость, di – длина i-го лесовозного автопоезда и k –
плотность потока, тогда имеем: k = n/z , z = vT, di = vti .
Рис. 4.1. Схема регистрации потоков автомобилей с помощью детекторов
Зная величину О, мы можем определить приближенное значение плотно-
сти потока k. Таким же образом устанавливается средняя скорость потока по выражению интенсивности движения q = kv :
v |
q |
|
nd |
|
|
|
|
. |
(4.2) |
||
k |
ТО |
||||
По выражению (4.2) определяется число лесовозных автопоездов, входя-
щих на определенный участок дороги и покидающих его [106].
Установленная из выражений (4.1), (4.2) плотность лесотранспортного по-
тока (длина очереди) позволяет сделать вывод, что длина очереди изменяется

103
синхронно с определенным циклом. По данным регистраторов движения пото-
ков на отрезке дороги можно определить наличие очереди как выраженную корреляционную зависимость между длиной очереди транспорта и занятостью дороги. На рис. 4.2 построена корреляционная зависимость периода занятости дороги от длины очереди транспорта, полученная по данным регистраторов движения транспорта за 250 м до пересечений, при длине очереди от 100 до
500 м. С помощью предложенной методики легко можно определить «узкие» места при определении длины очереди транспорта на участках, задерживающих движение.
Рис. 4.2. График корреляционной звисимости периода занятости от длины очереди транспорта
Определим теперь количество лесовозных автопоездов, проходящих точку расположения регистраторов на дороге за интервал времени Т. Обозначим че-
рез q интенсивность потока, а Рп – вероятность прибытия автомобилей за пери-
од Т, за который определено n лесовозных автопоездов. Известно [51], что в теории массового обслуживания заявок принят Пуассоновский поток распреде-
ления случайных величин. Тогда Пуассоновский поток для определения интен-

104
сивности движения лесовозов можно установить по следующей зависимости
[51]:
P |
(qT )n |
e qT |
. |
(4.3) |
|
||||
n |
n! |
|
||
|
|
|
|
Для Пуассоновского потока среднее значение числа прибывающих лесо-
возных автопоездов и дисперсия σ2 одинаковы [51], т. е. отношение среднего квадратичного отклонения к среднему значению равно
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
, |
(4.4) |
|||
qT |
|||||||
|
|
||||||
|
|
|
|
|
|||
где μ – математическое ожидание случайной величины.
Если, например, установим верхнюю границу соотношения σ/μ < 0,1, по-
лучим qТ > 100 (необходимо подсчитать параметры не менее 100 лесовозных автопоездов).
Временной интервал между прибывающими лесовозными автопоездами описывается Эрланговским распределением k-го порядка [51] (при K > 1 на участках с большой интенсивностью движения имеем экспоненциальное рас-
пределение, если К = 1, то имеем экспоненциальное распределение, описывае-
мое Пуассоновским потоком прибывающих лесовозов). В этом случае получим
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(4.5) |
||||
|
|||||||
|
|
|
|
|
|||
|
k |
|
|
kqT |
|
|
|
Распределение количества прибывающих лесовозных автопоездов «снижа-
ется» при возрастании k. По мере изменения условий движения плотность по-
тока (k) изменяется и может быть определена по формуле (4.4). Данная зависи-
мость определяет большой объем вычислений при значительной интенсивности потока.
Пусть m – количество учтенных лесовозных автопоездов с результатами распределения n1, n2,…, nm и определенным отрезком времени подсчета для пе-
риода – Т. Временной промежуток между лесовозными автопоездами описыва-
ется случайными величинами, подчиняющимися Эрланговскому распределе-

105
нию при k ≥ 1. При значительном интервале прибытий (qT) любое число пi опи-
сывается нормальными распределениями. Дискретное распределение Пуассона
(qT = 100) и плотность его распределения подчиняется нормальному закону
(рис. 4.3):
|
1 |
|
|
n 2 |
|
|
|
|
ехр |
|
( 100) |
|
|
|
2 |
||
|
2 |
||||
|
|
|
|
||
— – нормальное распределение Гауса;  – распределение Пуассона
– распределение Пуассона
PU – плотность распределения вероятностей
Рис. 4.3. График наложения дискретного распределения Пуассона и нормального распределения
Как видно из графика (рис. 4.3), распределения почти совпадают, поэтому примем и будем в дальнейшем описывать измеренные параметры с помощью нормального распределения при среднем значении qT и дисперсии qT / k, k≥1.
Примем это в дальнейших исследованиях

106
4.2. Определение интенсивности движения потока лесовозных
автопоездов по автомобильным дорогам
Статистическое определение интенсивности движения при n1,n2,…,nm , яв-
ляется результатом учета лесовозных автопоездов на отрезке времени Т. Ин-
дексы n1, n2, …, nm – отрезки, не совпадающие по времени, и распределяются согласно нормальному закону, плотностью распределения
|
|
1 |
|
|
n 2 |
|
|
|||
f(n) = |
|
|
|
ехр |
|
|
|
, |
(4.6) |
|
|
|
|
2 |
2 |
||||||
2 |
||||||||||
|
|
|
|
|
|
|
|
|||

 m
m
где μ – математическое ожидание; m – число серий подсчета; σ2 – дисперсия.
С помощью (4.6) можно определить доверительные иттервалы для μ. При-
мем, что соотношение μ=qt есть изменение интенсивности транспортного пото-
ка при случайно распределенных значениях n1, n2,…,nm.
При помощи нормального распределения, применяя правило ± 3 σ, нахо-
дим величину доверительного интервала для соотношения μ=qt и обозначим его как уступки η1 и η2 для истинного значения (η=0) в виде заштрихованной зоны [51] (рис. 4.4).
Рис. 4.4. График распределения доверительного интервала движения лесовозных автопоездов

107
Если η входит в область [η1, η2] с вероятностью 1-δ, тогда интервал [η1, η2]
принимает истинное значение, равное 1-δ, а интервал [μв, μи] становится дове-
рительным, где μо и μв являются верхней и нижней границей доверительного интервала.
Покажем предложенный подход на конкретном примере.
Величину 1-δ примем в пределах 0,95 или 0,99, а η1, соответствующая до-
верительной вероятности 1-δ, определяется: η =1,96 для доверительной вероят-
ности 1-δ=0,95 и η=2,58 для вероятности 1-δ=0,99 (значения зависимостей t для
1- δ=0,95 представлены в справочных таблицах [51]).
Путем фотохронометражных наблюдений интенсивность транспортных потоков была замерена шесть раз в различные часы суток с получением числа автомобилей в потоке: 199, 174, 208, 221, 181 и 205. Для расчета интервала движения с вероятностью 0,95 примем m=6, тогда число степеней свободы υ=5.
Согласно уравнениям (4.4) и (4.7), число n=198, σ2 =308,8. Тогда σ=17.57; to=2,57 при
|
|
198.0 |
17.57 |
|
2,5706 179,6 |
|
|
198,0 |
17,57 |
2,5706 216,4 . |
|
1 |
|
|
|
и |
|
||||||
6 |
|
|
|
6 |
|
||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||
Пусть тх и mv – число проведенных хронометражных наблюдений при оп-
ределении параметров движения автомобильного потока за определенный вре-
менной период со средними значениями оценок nx и ny и дисперсией σx2 и σy2.
Соотношения N(μxσ2) и V(μxσ2) могут описываться разными распределениями.
Если μx=μv, а nx и ny – независимые величины, тогда различие в измерениях
Е(пх-ny)=0. Независимые величины (пх и пy) подчиняются закону распределения
|
x |
, |
2 |
|
и |
|
y |
, |
2 |
|
с дисперсией [51] |
|
|
|
|
|
|
|
|
|||||||
в виде N |
|
|
N |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
mx |
|
|
|
|
|
my |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
1 |
|
2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
xy |
|
|
|
|
|
|
|
|
|
|
|
. |
(4.7) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
mx |
|
my |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx |
|
my |
|
|
|
||||||
Для проверки гипотезы μx = μy имеем:
1) Если t>to, то предположение μx = μy неверно.
108
2) Если t≤to, то предположение о равенстве верхних и нижних доверитель-
ных границ μx и μy верно.
В первом случае гипотеза считается значимой, а во втором случае – незна-
чительной для отмеченного выше предположения.
При разработке тестовых задач при значимых различиях в измерениях предположение отклоняется в виду недостаточного объема статистических данных для проверки данных предположений.
4.3. Имитационное моделирование расположения лесовозных
автомобилей в транспортном потоке
При моделировании транспортного потока невозможно учесть все факто-
ры, влияющие на систему. Чтобы решить данную задачу каким-либо методом моделирования, необходимо сузить как ее постановку, так и масштабы модели.
Имитационное моделирование позволяет решать данную проблему, кото-
рую затруднительно решить аналитически (при натурном эксперименте), по-
зволяет проводить исследования различных ситуаций организации, управления движением транспортных потоков лесоматериалов по сети лесовозных дорог,
анализировать постоянные в течение времени события достаточно быстро, оце-
нить важность отдельных параметров, что облегчает создание аналитических моделей.
Все это дает возможность решать транспортные задачи по определению пропускной способности автодорог, интенсивности движения по ним для различных скоростных групп автомобилей, сетевых направлений грузопотоков по кратчайшим расстояниям доставки лесоматериалов от лесозаготовительных предприятий к складам сырья и далее формировать устойчивый опорный план доставки лесоматериалов в места их переработки с наименьшими затратами по всему транспортно-грузовому процессу. Имитационное моделирование в предмете исследования должно планироваться в виде ряда последовательных этапов

109
сбора информации, характеризующей каждый участок дороги, основные из которых приведены на рис. 4.5.
Наиболее важным шагом является составление модели процесса. Модель, которая имитирует реальную транспортную систему, не может быть определена единственным образом. Это означает, что многочисленные элементы вводятся в модель в составе единственного блока (точки отправления и назначения). Точность модели должна определяться в соответствии с целью моделирования и характеристиками имитирующей системы. Имитационные модели можно разделить на следующие категории:
представляющие индивидуальные лесовозы (микроскопические моде-
ли);
представляющие группы из нескольких лесовозных автопоездов (макроскопические модели);
рассматривающие транспортный поток как жидкость, то есть непрерывные (жидкостная модель).
Рис. 4.5. Распределение информации о движении потока автомобилей в процессе имитационного моделирования
110
Далее различаются методы «продвижения» времени при имитационном моделировании, разделенные на модели с периодическим продвижением и про-
движением по событиям. При дискретном продвижении лесовозный автопоезд передвигается через каждый фиксированный интервал времени t и процесс моделирования переходит к следующему интервалу t. При продвижении по событиям время в системе изменяется только в момент, когда происходит ка-
кое-либо новое событие, и процесс моделирования продолжается путем розы-
грыша появления следующего события. Хотя второй метод эффективнее в слу-
чае моделирования транспортной системы, в которой происходит относительно мало событий, первый метод обычно используется, когда моделируются транс-
портные системы, в которых лесовозные автопоезда непрерывно движутся.
Рассмотрим два метода хранения информации в ЭВМ о лесовозных авто-
поездах в системах имитационного моделирования. В первом из них дорога разделяется на блоки достаточной длины и для каждого блока отводится уча-
сток памяти ЭВМ. Параметры лесовозного автопоезда (скорость и направ-
ление), если они определены в данном блоке, запоминаются в участке памяти,
соответствующем месту нахождения лесовозного автопоезда, и его движение представляется передачей информации между участками памяти («физиче-
ская», или дорожно-ориеитнрованная модель). Во втором методе для каждого лесовозного автопоезда отводится участок памяти и учитываются его индиви-
дуальные характеристики (место нахождения и скорость). Когда используется физическая модель, то дорога делится на участки протяженностью, равной средней длине лесовозного автопоезда. Если учитывается длина лесовозного автопоезда, то дорога разбивается на участки меньшей длины, и каждый лесо-
возный автопоезд представляется цепочкой единиц [52].
В математической модели лесовозный автопоезд, входящий на автомаги-
страль, получает идентификационный номер, и информация относительно мес-
та его нахождения, скорости и др. записывается в участок памяти ЭВМ, соот-
ветствующий данному идентификационному номеру. Обгоны лесовозного ав-