


3. ПРОЕКТИРОВАНИЕ ПЛАНА ТРАССЫ УЧАСТКА АВТОМОБИЛЬНОЙ ДОРОГИ
3.1. Основные положения
Трассирование – прокладка трассы в соответствии с природноклиматическими факторами, топографо-геодезическими, геологогидрологическими, экологическими условиями района проектирования с учетом эксплуатационных, строительно-технологических, экономическ х эстет ческих требований.
План трассы представляет собой набор увязанных между собой |
|||
горизонтальных прямых и кривых, образующих ось дороги (рис. 3.1). |
|||
С |
|
|
|
Плановая геометр я создается в той же системе координат, что и си- |
|||
, ц фровая модель рельефа. |
|
||
|
ВУ-1 |
|
R2 |
туация |
|
|
|
|
|
|
B |
l1 |
l2 |
l1 |
l2 |
A |
|
|
|
|
R1 |
|
ВУ-2 |
|
Рис. 3.1. Схема плана трассы |
||
Ось трассыбпри полигональномАтрассировании представляем в |
|||
виде набора вершин горизонтальных углов поворота и прямых. В ка- |
|||
|
|
Д |
|
ждый угол поворота могут быть вписаны круговая и две переходных |
|||
кривых. |
|
|
И |
Переходная кривая – кривая постепенно изменяющейся кри- |
|||
визны для обеспечения плавного перехода между участками трассы, |
|||
располагающаяся в плане между прямолинейным участком и кривой |
|||
или между двумя кривыми разной кривизны. |
|
||
Программный продукт Robur Road 7.5 позволяет проектировать биклотоиды по тангенсам и длинам переходных кривых, а также подбирать параметры закругления по радиусу и биссектрисе. Клотоида – это кривая в плане, кривизна которой возрастает от начала пропорционально ее длине.
В автоматизированном режиме производится расчет и взаимоувязка основных элементов горизонтальных кривых (рис. 3.2): β – угла поворота; R – радиуса кривой; Т1 и Т2 – тангенсов кривой; Б – бис-
60
сектрисы; L1 и L2 – переходных кривых; К – длины горизонтальной кривой.
С |
|
таскивать |
|
|
Р с. 3.2. Основные элементы горизонтальной кривой |
Верш ны углов, вместе со вписанными кривыми, можно пере- |
|
|
мышью, что о еспечивает дополнительную гибкость при |
|
бА |
проект рован . Соседние тангенсы образуют базовые линии, к кото- |
|
рым пр вязывают гор зонтальные кривые. |
|
|
Программный комплекс Robur Road 7.5 поддерживает два спо- |
соба задан я плана трассы, который может быть определен одним из |
|
двух способов: |
|
|
из примитивов чертежа; |
|
прямым указанием вершин. |
|
3.2. Построение оси плана трассы способом |
|
Д |
|
«из примитивов чертежа» |
Построение отдельными элементами
Данный метод позволяет создавать трассу из отдельных составляющих ее элементов (прямых участков, круговых кривых, клотоид). Необходимо предварительно построить элементы, выбрать способы сопряжения примитивов, а затем объединить их в трассу.
Для построения используются элементы из выпадающего меню |
||
Ситуация → Рисовать, такие как отрезок (для построения прямой |
||
вставки), дуга (для построения круговой кривой), клотоида (для по- |
||
строения переходной кривой). |
И |
|
Для удобства сопряжения элементов необходимо включить при- |
||
вязки к точкам элементов с помощью команды Ситуация → Средст- |
||
ва → Привязки или соответствующей пиктограммы Привязки |
на |
|
панели инструментов. |
|
|
61
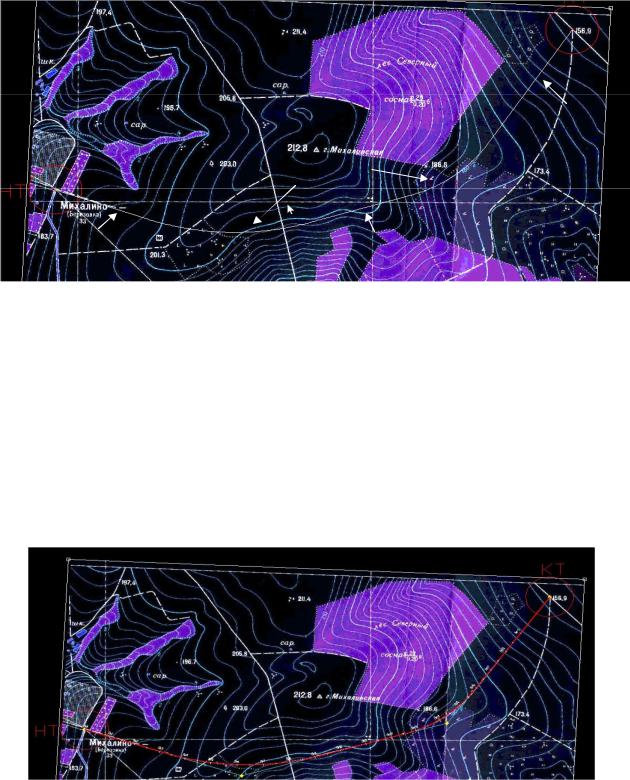
Размещаем последовательно элементы, стыкуя их между собой таким образом, чтобы получить очертание оси плана трассы участка.
С |
|
отрезок |
|
и |
дуга |
||
|
|
|
|
отрезок |
|
|
|
|
выберите |
||
|
|
|
отрезок |
|
Р с. 3.3. Построение оси отдельными элементами |
||
Для того что |
А |
||
создать ось из примитивов чертежа: |
|||
|
|
элемент меню План → Создать ось из примити- |
|
вов, курсор при этом примет форму прицела; |
|||
далее последовательно укажите примитивы, из которых не- |
|||
|
|
|
Д |
обходимо создать трассу, и нажмите ПКМ. Программа построит трассу и автоматически разобьет пикетаж.
После чего можно откорректировать положения вершин угла и параметры круговых и переходных кривых.
И
Рис. 3.4. Ось плана трассы, созданная из отдельных элементов
62
Основным преимуществом данного способа построения является то, что после построения трассы из примитивов ее можно отредактировать путем перемещения вершин. И наоборот, уже созданная трасса может быть разбита на составляющие ее примитивы, отредактирована и обратно собрана (из примитивов).
СОпределение оси из полилинии
Для того чтобы определить ось трассы из полилинии:
выбер те элемент меню План → Создать ось из примити-
широквов, после чего курсор примет форму мишени, а в строке статуса появится подсказка: выбер те полилинию;
укаж те курсором нео ходимую полилинию. Программа создаст ось трассы автоматически разобьет пикетаж.
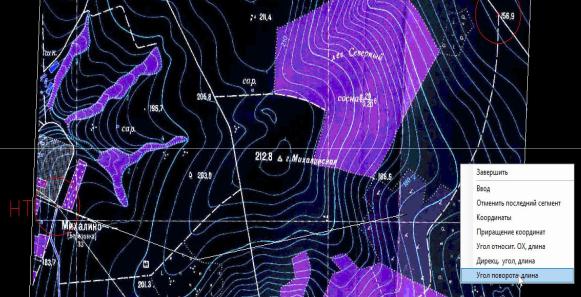
Основнымнаборпре муществом данного способа построения является тот факт, что при построении очередного сегмента присутствует й нструментов по заданию направления и длины сег-
мента. Для вызова команды в процессе построения необходимо нажать ПКМ выбратьАнео ходимый способ построения (рис. 3.5).
Д
Рис. 3.5. Построение сегмента полилинииИ
Сегмент полилинии может быть представлен не только отрезком, он может быть и в виде дуги. Для этого необходимо захватить ЛКМ точку середины сегмента и задать новое положение. Автоматически будут рассчитаны параметры дуги и перестроен данный сегмент.
63

СвниманР с. 3.6. Редактирование сегмента полилинии
нения направлен я по о еим сторонам дуги (круговой кривой), в которые с стема не вп шет в автоматическом режиме круговые кривые.
Однако, при создании оси трассы таким способом, обращаем е набАтот факт, что автоматически будут созданы точки изме-
Аналог чным о разом можно выполнять построение оси трассы
и из структурной л н . Вместо полилинии ось трассы предварительно отрисовывается структурной линией, после чего выполняется ко-
манда План → Создать ось из структурной линии.
Определение оси из осевой линии
Предварительно ось трассы строится с помощью осевой линии.
Для этих целей вызывается команда Ситуация → Рисовать → Осевая линия, необходимо задать первый сегмент осевой линии. При этом после указания ЛКМ первой точки (точки начала трассы) для
построения первого сегмента |
можно вызвать контекстное меню |
|
|
|
И |
щелчком ПКМ, содержание контекстного меню зависит от вида сег- |
||
мента (рис. 3.7.). |
|
Д |
а |
б |
в |
Рис. 3.7. Контекстное меню построения сегмента осевой линии: а – для отрезка; б – для дуги; в – для клотоиды
64
Таким образом, данный режим построения позволяет поочередно, шаг за шагом, вводить элементы оси плана трассы и назначать их параметры, при необходимости выполнять корректировку введенных значений. После выбора интересующего способа построения сегмента открывается окно с назначением параметра.
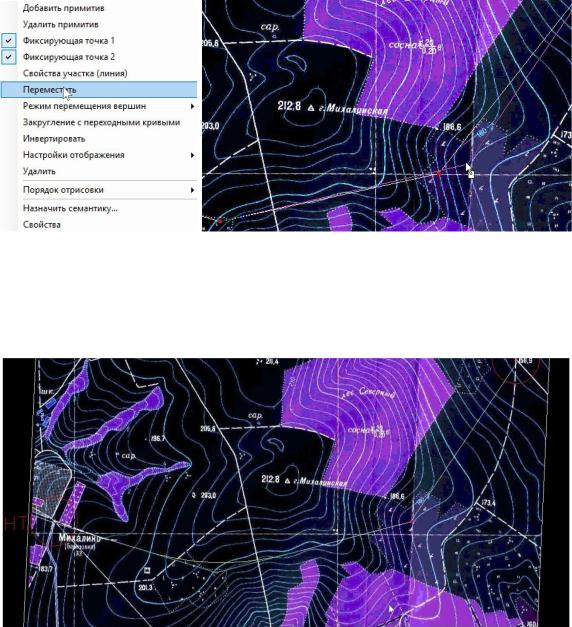
СОсевую линию можно построить в виде ломаной, то есть отрезками, после чего выполнить редактирование положения вершин перелома. Изменен е положения вершин осуществляется через команду Перемест ть, после чего выбирается редактируемая вершина и задаетсярисее новое положен е ( . 3.8.).
бАРис. 3.8. Перемещение вершин осевой линии
В каждую вершину осевой Длинии можно вписать круговую кривую. Для этого выбираем из контекстного меню после щелчка ПКМ на вершине перелома команду Закругление с переходными кривыми.
 И
И
Рис. 3.9. Назначение Закруглений в вершинах углов поворотов
65
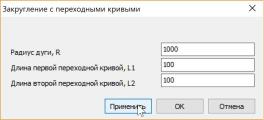
В открывшемся окне необходимо указать радиус круговой кривой и длины переходных кривых. После чего нажать на кнопку Применить и, если это возможно, система запроектирует закругление.
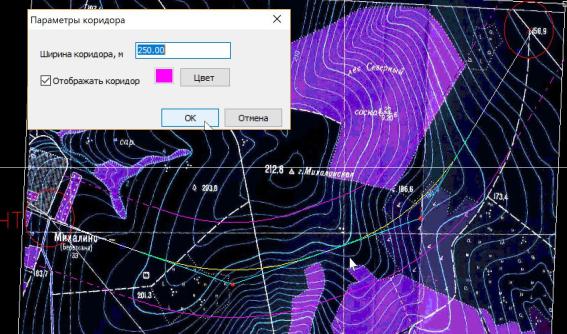
Осевые линии, помимо традиционных команд редактирования и отображения параметров элементов, позволяют задавать коридоры, то есть полосы (границы полос) слева и справа от осевой линии, смещенные на заданное расстояние от осевой линии. Для этого выполняется команда контекстного меню ПКМ → Настройки отображения
С→ Отображать кор дор.
и бА
Рис. 3.10. Отображение коридора осевой линии
разобьет пикетаж.
Для создания оси трассы из построенной осевой линии: |
|
- выберите элемент меню План → Создать ось из примитивов, |
|
Д |
|
курсор при этом примет форму прицела; |
|
- далее укажите осевую линию, из которой необходимо создать |
|
трассу, и нажмите ПКМ. Программа построит трассу и автоматически |
|
|
И |
При выполнении команд по созданию оси из элементов чертежа (примитивные элементы, полилинии, структурные и осевые линии) могут возникнуть ошибки с разбивкой пикетажа в автоматическом режиме (рис. 3.11). Для исправления ошибок разбивки пикетажа нужно выполнить команду по его принудительному разбиению: План → Разбить пикетаж.
66
Пикетаж не разбит
С |
Отрицательный |
|
|
и |
|
|
Р с. 3.11. Ошибка разбиения пикетажа |
3.3. Построение оси плана трассы способом |
|
|
«прямое указание вершин» |
бА |
|
В данном случае построение оси плана трассы выполняется визуально, основные элементы (такие, как начало трассы, вершины углов поворота, конец трассы) размещаются щелчком ЛКМ.
Как правило, проектирование плана трассы производят в следующей последовательности:
определяют положение вершин углов поворота трассы;
вписывают горизонтальные кривые;
уточняют положение оси, изменяя положения вершин угла с вписанными горизонтальными кривыми.
Чтобы определить ось трассы способом Прямого указания вер-
шин выберите команду План → Наметить/Продлить ось (илиД
щелкните на кнопке |
панели инструментов). Последовательно |
|
И |
укажите курсором положение вершин углов поворота трассы. Для окончания ввода нажмите ПКМ. Программа построит ось трассы и автоматически разобьет пикетаж.
Построение можно сделать другим способом: показать точки начала и конца трассы. После чего закончить построение оси трассы, то есть соединить начало и конец трассы. Вершины углов поворота можно добавлять двойным нажатием ЛКМ в любой точке трассы (на красной линии в том месте, где хотите ввести угол поворота). Точка угла поворота отображается маркером в виде ромбика желтого цвета.
Захватывая вершину ЛКМ, можно перемещать ее на другое место и выполнять корректировку параметров горизонтальной кривой, щелкнув ПКМ по вершине и выбрав Свойства из контекстного меню:
67

-назначать радиус кривой в зависимости от местности и угла поворота;
-изменять длину переходной кривой.
Программный комплекс допускает изменять положение вершины угла поворота (потяните вершину с зажатой ЛКМ), в которую вписана горизонтальная кривая, при этом вершина угла будет двигаться вместе с вписанной кривой, не меняя ее основные параметры.
Процедура построения способом «Прямое указание вершин»
приведена на р с. 3.12. |
|
|
|
|
|
С |
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
Построение оси плана трассы |
. |
|
|
|
|
|
||
|
|
|
|
||
|
|
|
|
|
|
|
Двойным щелчком ЛКМ до- |
|
|
|
|
|
бА |
|
|
||
|
бавляются вершину углов |
Д |
|
|
|
|
поворота, перемещаются |
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
И |
||
Рис. 3.12. Построение оси плана трассы способом «Прямое указание вершин»
После построения трассы, вводим параметры горизонтальной кривой (рис.3.13).
68