

2438
.pdfспутники в зоне радиовидимости объекта; если каналов меньше, чем «видимых» спутников, то автоматически выбирается их оптимальное сочетание.
Дифференциальная подсистема (ДПС)
Дифференциальная подсистема (ДПС) представляет собой группу объединенных в единую сеть пунктов с известными координатами, называемыми базовыми станциями, на которых выполняются непрерывные спутниковые измерения. На основе этих измерений строится оптимальная модель влияния каждого источника погрешностей (хода часов, эфемерид, ионосферных задержек и пр.), определяются ее параметры для зоны действия ДПС и используются для исправления измеренных дальностей (PDGPS) или координат (DGPS).
В зависимости от зоны действия ДПС различают:
локальные ДПС, действующие в радиусе 50–200 км и обеспечивающие точность позиционирования на уровне 2,0–4,5 м;
региональные ДПС, действующие в радиусе от 400 км до 2000 км (например, сетьStartfix с заявленной погрешностью не более 3 м);
глобальные и широкозонные ДПС, действующие в радиусе до
5000 км (например, EGNOS, WAAS, MSAS, OmniSTAR и др.);
Дифференциальный метод позиционирования предполагает, что
на каждой базовой станции независимо от других станций формируются и распространяются потребителям поправки для наблюдений каждого спутника в отдельности, и остающиеся после коррекции погрешности положения пунктов будут обусловлены влиянием ионосферных и тропосферных погрешностей, многолучевости, а также орбитальными погрешностями. При этом «… для погрешностей с сильной пространственно-временной корреляцией (атмосферные и орбитальные эффекты) эффективность их коррекции уменьшается с увеличением расстояния между базовой станцией и потребителем и на больших удалениях (500–2000 км) точность DGPS-местоопределения может быть практически сравнимой с точностью автономного местоопределения …» [45].
81
Это обстоятельство обусловило появление так называемых широкозонных дифференциальных подсистем как функциональных дополнений GPS (GNSS), в которых наблюдения разреженной сети базовых GPS-станций обрабатываются совместно, путем моделирования атмосферных и орбитальных (эфемеридных) погрешностей в зоне покрытия сети референцных станций с учетом свойства про- странственно-временной корреляции. Такой подход позволяет значимо повысить уровень точности и надежности позиционирования, обеспечить практически равномерное распределение точности коррекций по всей зоне покрытия сети станций и носит наименование
WADGPS.
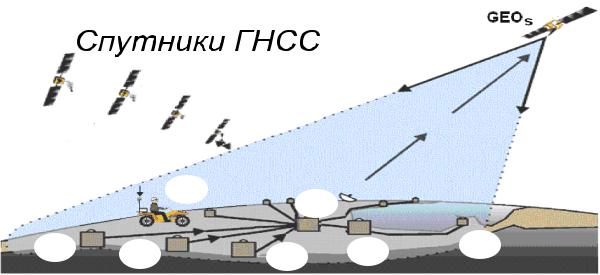
Сущность коррекции спутниковых измерений поясним на примере системы OmniSTAR, включающей около 100 референцных станций, три Центра загрузки данных на спутники и два Центра сбора, обработки и управления глобальной сети референцных GPSстанций (рис. 10.11).
3
|
|
1 |
2 |
2 |
2 |
2 |
2 |
Рис. 10.11. Принцип работы системы OmniSTAR [45]
Результаты измерений на референцных станциях (2) через выделенные каналы передаются в Центры сбора и управления (1). Эти Центры принимают данные, контролируют их и передают на геостационарный спутник GEOS для трансляции в L-диапазоне на приемники потребителей (3) с целью получения оптимального решения путем взвешенной обработки данных референцных станций, причем веса являются функциями расстояний между потребителем и станциями. В
82
результате множество коррекций по каждому спутнику заменяется единственной оптимальной.
Точность позиционирования с коррекцией OmniSTAR для коммерческих приемников высокого качества с вероятностью 95% составляет менее 1 м по плановым координатам и 2–2,5 м по высоте.
В настоящее время работает несколько ДПС аналогичного клас-
са:
на американском континенте – WAAS (Wide Area Augmentation System) и LAAS (Local Area Augmentation System);
в Европе – EGNOS (European Geostationary Navigation Overlay System);
в Японии – MSAS (MTSAT Space-based Augmentation System, где MTSAT – Multifunctional Transport Satellite System).
ВРоссии региональные дифференциальные подсистемы и станции только начинают развиваться, и главной преградой на их пути являются законодательные ограничения точности.
10.3.3. Навигационные сигналы GPS, ГЛОНАСС и Galileo
Высокоточное решение навигационных задач предполагает синхронизацию хода часов в приемной аппаратуре и на спутниках, точное определение их положения в планетарной системе координат и наличие измерительных спутниковых сигналов с точными радиотехническими параметрами.
Счет времени
Определение расстояния между движущимися со скоростью около 3,9 км/сек спутниками и наземными пунктами выполняется путем измерения времени прохождения радиосигнала между этими точками. Громадная скорость распространения сигнала (около 300000 км/сек), требует точной синхронизации времени в спутниковых системах.
В связи с этим на главных станциях управления любой СНС устанавливается системное время, принимаемое за эталон и поддерживаемое высокоточным генератором шкалы времени на основе водородного стандарта, нестабильность которого оценивается на уров-
не (1-5) 10-14.
На спутниках установлены генераторы частоты на основе цезиевого и рубидиевого стандарта с погрешностью хода порядка 1 10-13;
83
уход шкал времени спутников относительно эталона аппроксимируется полиномами первой или второй степени, коэффициенты которых передаются на спутники и в последующем включаются в навигационную информацию, поступающую в спутниковые приемники.
Время в системе GPS имеет собственную шкалу и обозначается в виде «N:S», где S – номер секунды в неделе, а N – номер недели в диапазоне от 0 до 1023, начиная с 0 часов 06.01.1980 г., увеличивающийся на единицу, когда S = 604800; после N = 1023 счет недель начинается с нуля.
Различия между шкалой координированного времени UTC (Universal Time Coordinated) и временем GPS, которое обозначается символами UTC (USNO) или UTC (GPST), передается в навигационном сообщении.
Время в системе ГЛОНАСС устанавливается в соответствии с Государственным эталоном частоты и времени Российской Федерации. Оно сдвинуто относительно времени UTC на 3 часа, корректируется одновременно с ним и обозначается UTC (SU); величина поправки указывается в навигационном сообщении. Счет времени выполняется с 00h00m00s 1 января последнего високосного года.
Координатное обеспечение
Для построения математической модели движения спутника используется общеземная (планетарная) система координат, в качестве которой могут использоваться геоцентрические системы ITRS (Terrestrial Reference System), ITRF (ITRS Terrestrial Reference Frame), WGS84 (World Geodetic System, 1984), ПЗ-90.02.
Передаваемые со спутников навигационные сообщения содержат не координаты спутника и изменения вектора его скорости, а относительно медленно меняющиеся параметры некоторой модели, которая аппроксимирует траекторию полета космического аппарата на достаточно большом интервале времени [5]. Соответствующая обработка этих данных позволяет вычислить координаты спутника на нужный момент времени.
В системе GPS используется общеземная система координат
WGS-84 и Кеплеровская модель движения с оскулирующими эле-
ментами. При этом траектория полета спутника разбивается на участки аппроксимации длительностью в один час.
Потребителю навигационной информации передается положение центральной точки участка, параметры движения на соответст-
84

вующий момент времени, а также параметры модели оскулирующих элементов и функций, аппроксимирующих изменения параметров модели во времени, как предшествующем узловому элементу, так и следующем за ним.
Всистеме Глонасс для определения точного положения спутника используется общеземная система координат ПЗ-90.02 и диффе-
ренциальная модель движения, в которой координаты и состав-
ляющие вектора скорости спутника определяются численным интегрированием дифференциальных уравнений его движения, учитываюющих конечное число действующих сил. Начальные условия интегрирования задаются на середину интервала аппроксимации.
Всистеме Galileo в качестве наземной опорной системы координат планируется использовать систему GTRF, независимую от WGS-84 и согласованную с ITRF. Описание этой системы, модели движения спутников на участке траектории и перечень параметров ее аппроксимации в технической литературе не приводится.
Навигационные сигналы
Каждый спутник на строго определенных частотах генерирует сигналы, в которые путем модуляции встраиваются дополнительные данные, включающие измерительные коды и навигационные сообщения (свои эфемериды, данные о точности часов, параметры модели ионосферной задержки, временные метки и альманах). Соответствующая обработка принятых спутниковым приемником сигналов позволяет вычислить положение фазового центра его антенны в нужной координатной системе.
Сигналы передаются на близких и частично перекрывающихся участках частотного спектра и обозначаемых символами L, G и E, обозначающими принадлежность системе (рис. 10.12).
GPS |
Galileo |
GPS |
ГЛОНАСС |
Galileo |
GPS |
E2 |
GPS |
E1 |
ГЛОНАСС |
L5 |
E5 |
L2 |
G2 |
E6 |
L3, L4 |
L1 |
G1 |
||
1164 |
|
1215 |
|
1260 |
1300 |
1559 |
|
|
1600 МГц |
Рис. 10.12. Частотный план систем GPS, ГЛОНАСС и Galileo
Система GPS используется 5 сигналов L1 L5 (в том числе L3 и L4 для военных пользователей и сигнал L5), система ГЛОНАСС – два сигнала G1 и G2, а система Galileo – 10 .
Встраивание в сигналы дополнительной информации (измерительных кодов, навигационных сообщений и пр.) выполняется путем
85
их модуляции путем «переброски» фазы (метод ФМ) несущего сигнала на 180 в моменты, когда бинарный код 0 встраиваемого сигнала изменяется на 1, на 0 или с 0 на 1. В приемной аппаратуре эта дополнительная информация выделяется из сигнала путем его демодуляции[29, 39].
Частотные характеристики сигналов спутников GPS, ГЛОНАСС и Galileo приведены в табл.10.4.
|
|
|
|
|
|
|
|
|
Таблица 10.4 |
|
Параметр |
|
|
|
|
Наименование ГНСС |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
GPS |
|
ГЛОНАСС |
|
|
Galileo |
|
|||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
Метод разделения |
|
CDMA |
|
FDMA (частотный) |
|
CDMA (кодовый) |
||||
|
(кодовый) |
|
|
|
|
|
|
|
||
Рабочая частота |
L1 |
1575,420 |
G1 |
1598,0625-1605,3750 |
|
E2-L1-E1 1559 – 1592 |
||||
L2 |
1227,600 |
G2 |
1242,9375-1245,6250 |
|
E6 |
1260 – 1300 |
||||
сигнала, МГц |
|
|||||||||
L5 |
1176,450 |
|
|
|
|
E5 |
1164 – 1215 |
|||
|
|
|
|
|
||||||
Скорость переда- |
|
|
|
|
|
|
|
|
|
|
чи |
|
|
|
|
|
|
|
E2-L1-E1 B/C |
2 |
|
(GPS, Galileo – |
C/A 1,023 |
|
СТ |
0,5110 |
|
|||||
|
|
E6,E2-L1-E1 A 5 |
||||||||
Мчип/c |
P |
10,23 |
|
ВТ |
5,1100 |
|
||||
|
|
E5 |
|
10 |
||||||
ГЛОНАСС – |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Мбит/c) |
|
|
|
|
|
|
|
|
|
|
|
|
C/A |
2 |
|
СТ |
1 |
|
E2-L1-E1 B/C |
4 |
|
Ширина полосы, |
|
|
|
E6 |
|
24 |
||||
|
P |
20 |
|
|
|
|||||
МГц |
|
|
ВТ |
10 |
|
E2-L1-E1 A |
32 |
|||
|
L5 |
24 |
|
|
||||||
|
|
|
|
|
|
E5 |
|
40 |
||
|
|
|
|
|
|
|
|
|
||
Тип кода |
C/A - код Голда |
СТ - m-последовательность |
|
|
Нет данных |
|
||||
P |
- ПСП |
|
ВТ - ПСП |
|
|
|
||||
|
|
|
|
|
|
|||||
|
C/A |
1023 |
|
|
|
|
|
|
|
|
Длина кода |
|
P-код |
|
СТ |
511 |
|
|
Нет данных |
|
|
6187104 1012 |
|
ВТ 5,11 106 |
|
|
|
|||||
|
P |
2,35 1014 |
|
|
|
|
|
|
|
|
Криптозащита |
|
Есть |
|
Нет |
|
|
Планируется |
|
||
Время |
UTC (USNO) |
|
UTC (SU) |
|
|
GTC |
|
|||
Разделение сигналов выполняется одним из двух методов:
частотный (метод FDMA, Frequency Division Multiple Access),
используется в системе ГЛОНАСС и предполагает установление для каждого спутника своей частоты;
кодовый (метод CDMA, Code Division Multiple Access), ис-
пользуется в системах GPS и Galileo и позволяет выполнить разделение сигналов по встраиваемым в них псевдослучайным кодам.
86
В системе GPS все спутники передают навигационные сигналы на несущих частотах L1 – L5, сформированных путем умножения основной частоты эталонного генератора f0 = 10,23 МГц на константы:
L1 |
f0 |
fL1 |
10,23 154 1575,42МГц, |
19,03см |
|||
L2 |
f0 |
fL2 |
10,23 120 1227,60МГц, |
|
|
||
24,45см . |
|||||||
L |
f |
0 |
f |
L5 |
10,23 115 1176,45МГц |
25,5см |
|
5 |
|
|
|
|
|
||
Навигационные сигналы L1 и L2 модулируются бинарными псевдослучайными последовательностями (ПСП, Pseudo Random Noice - PRN), называемыми кодами C/A и P [5, 29, 39].
Код C/A, представляющий собой 10-разрядный код Голда, трактуется как грубый (Coarse Acquisition code) или гражданский (Civil Application), легко обнаруживается спутниковым приемником и используется как для идентификации спутника, так и для измерения дальностей. Он передается на частоте L1 циклами по 1023 бита (f = 1,023 МГц) с длиной тактовой волны
Т = c / f = 299742458 / (1,023 1000000) = 293,0 м,
где c – скорость распространения радиоволн в вакууме.
Код P, представляющий собой бинарную псевдослучайную последовательность, трактуется как «точный» (Precision) или «защищенный» (Protected), предназначен для военных приложений и передается на частотах L1 и L2 с частотой 10,23 МГц, что соответствует длине тактовой волны 29,3 м. С помощью нелинейной функции W(t) он преобразуется в Y-код (режим A/S – AntiSpoofing). Каждому спутнику соответствует свой код P, сменяемый каждую неделю, который доступен только военным пользователям, хотя некоторые спутниковые приемники могут его принимать.
Коды C/A и P передаются на частоте L1 в квадратурах (т.е. их математические описания соответствует функциям sin и cos, и один сигнал сдвинут относительно другого по фазе на 90 ); на частоте L2 передается только код P.
Навигационное сообщение передается с каждого спутника и включает его эфемериды, поправки к часам, параметры модели ионосферной задержки, альманах всех спутников группировки. Кроме того, оно содержит временные метки для моделирования хода часов спутника.
Информационные сообщения передаются пятью блоками по 1500 бит со скоростью 50 бит/с.
87
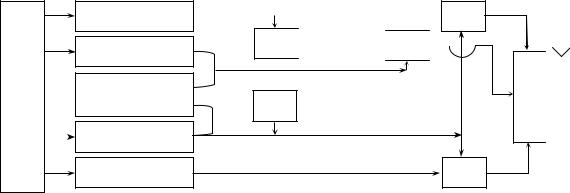
СхемаполучениярадиосигналовGPSпредставленанарис.10.13.
Эталонный генератор основной частоты
L1
C/A код
Навигационное  сообщение
сообщение
P-код
L2
 ФМ
ФМ
90  ФМ
ФМ 
AS
ФМ
Антенна
Рис. 10.13. Схема формирования радиосигнала GPS [39]
Вспутниках нового поколения Block IIR-M и Block IIF (табл. 10.2) предусмотрена передача нового сигнала на частоте L5 с пониженными ионосферными задержками и усложненного L2C на частоте L2 с пониженным шумом и ослабленной многолучёвостью. Планируется, что все спутники системы GPS будут передавать названные коды с
2014 г. [52].
Всистеме ГЛОНАСС для каждого спутника установлена фиксированная частота (табл.10.4), по которой они и различаются. Поскольку для космических аппаратов, находящихся в противоположных точках орбитальной плоскости, допустимо излучение сигналов на одинаковых частотах, то можно обойтись 12-ти рабочими частотами в каждом из двух диапазонов. Разделение таких сигналов в приемнике выполняется за счет пространственной и доплеровской селекции.
Сигналы G1 и G2 формируются от эталонного генератора основной частоты и связаны с номерами спутников k следующими зависимостями:
G1 |
1602 0,5625 k, |
18,7см |
G2 |
1246 0,4375 k, |
. |
24,1см |
Сигнал G1 модулируется кодами ВТ (высокой точности) и СТ (средней точности), а сигнал G2 - только кодом ВТ, причем, код СТ представляют собой 9-разрядную m-последовательность, а код ВТ - псевдослучайную последовательность (табл. 10.4). Длина тактовой волны кода СТ равна 587 м, а кода ВТ – 58,7 м.
Для системы Galileo выделено 10 рабочих частот и сигналов в диапазонах, разделяемых по кодам (метод CDMA, табл. 10.4).
Из этих сигналов:
88
три снабжены криптографической защитой и используются либо по подписке, либо для правительственной навигации в особый период;
четыре не модулированы, не содержат информации и используются как пилот-сигналы в специальной аппаратуре для высокоточного позиционирования по фазе несущей;
три содержат навигационные сообщения, передаваемые со скоростью 25, 125 и 500 бит/с;
все информативные сигналы кодируются избыточным кодом. При разработке СНС Galileo требование ее совместимости с GPS
достигнуто путем использования сигналов с разной кодовой структурой, работающих в перекрывающихся диапазонах. Причем совместное использование совпадающих сигналов на некоторых частотах, уменьшает помехи для гражданских сигналов, излучаемых на одной несущей частоте.
10.3.4.Содержание и точность спутниковых измерений
Втехнической литературе наблюдения по C/A-коду обозначают-
ся символами SPS (Standard Positioning Service, стандартная служба позиционирования), а по P-коду – PPS (Precise Positioning Service -
служба точного позиционирования).
Для измерения дальностей при спутниковых измерениях используются методы, базирующиеся на использовании кодовых и фазовых измерений.
Кодовые измерения основаны на сравнении 10-разрядных (в системе GPS) или 9-разрядных (в системе ГЛОНАСС) кодов C/A (СТ) и генерируемых по одним и тем же правилам аппаратурой спутника и приемника с включением временных меток [39]. Расстояние между спутником и приемником (псевдодальность) можно получить либо по времени прохождения сигнала, либо по числу кодовых последовательностей и тактов, по формулам
D ( ) c, |
(10.3, а) |
D N П (m Ф) m , |
(10.3, б) |
где ( + ) – время прохождения сигнала с учетом несинхронности хода часов спутника и приемника; c – скорость распространения радиоволн в вакууме; N, П – число кодовых последовательностей и длина кода PRN; m, Ф, m – целое число тактов, доля такта и длина тактовой волны.
89

Время прохождения сигнала определяется по меткам времени, содержащимся в принятой от спутника и сгенерированной приемником псевдослучайной последовательности.
Фазовые измерения основаны на определении целого числа радиоволн N, укладывающихся на расстоянии между спутником и приемником, и измерении фазы N. Тогда расстояние между спутником и приемником
D = (N + N) + R, |
(10.4) |
где – длина волны несущей частоты L1 или L2; R – суммарная поправка, учитывающая влияние тропосферы, ионосферы, ошибок эфемерид спутника, несовпадения хода часов спутника и приемника, инструментальных погрешностей, релятивистских эффектов и др.
Точность измерения разностей фаз составляет около 1 %, что при длинах волн несущих L1 и L2 (G1, G2) 20 – 25 см соответствует 2,0
– 2,5 мм и определяет потенциальную точность фазового метода. Сложность использования уравнения (2.4) заключается в том,
что целое число радиоволн N не может быть измерено и определяется в процессе разрешения неоднозначности. Эта задача решается либо с использованием избыточных фазовых измерений (при приеме сигналов двухчастотным приемником) или по результатам совместной обработки фазовых и кодовых измерений (при приеме сигналов одночастотным приемником) в процессе постобработки.
Погрешности спутниковых измерений обусловлены динамическим характером системы в целом, нестабильностью взаимного положения ее элементов и условиями прохождения сигнала. Точность позиционирования определяется значением геометрического фактора, зависящего от числа и размещения спутников, и качества навигационного сигнала,
Геометрический фактор (ГФ) представляет собой количественную оценку схемы взаимного расположения наблюдаемых спутников и устанавливается по эфемеридам этих спутников на момент наблюдений. Приведем значения ГФ, используя английские аббревиатуры их названий [47]:
|
GDOP |
Q |
Q |
Q |
Q |
|
, |
|
|||||
|
|
|
11 |
22 |
33 |
|
|
|
44 |
|
|
|
|
PDOP |
|
|
, |
VDOP |
|
|
|
, , |
(10.5) |
||||
Q11 Q22 Q33 |
|
Q33 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
HDOP Q11 |
Q22 |
, TDOP |
|
Q44 |
|
||||||||
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
|
|
|
|
|
|
||