

2438
.pdfпиксель и строки изображения снимка P2, начиная с пикселя, следующего за граничным.
Описанным выше методом можно присоединить к созданному фотоплану другие перекрывающиеся изображения снимков.
Цифровые фотопланы могут быть созданы путем формирования матрицы цифрового фотоплана непосредственно по всем перекрывающимся цифровым снимкам.
На рис. 9.27, а, б иллюстрируется процесс формирования цифрового фотоплана этим методом.
В рассматриваемом методе на перекрывающихся цифровых изображениях снимков проводят линии пореза, которые представляют собой полилинии. По координатам узлов полилинии в системе координат цифрового снимка определяют координаты проекций узлов полилинии на цифровом фотоплане в системе координат объекта и формируют полилинии на цифровом фотоплане.
По этим полилиниям определяют граничные пиксели, которые формируют границы участков цифрового фотоплана, создание которых будет производиться по соответствующим цифровым изображениям снимков.
Формирование цифрового фотоплана в пределах каждого из этих участков производится аналогично процессу формирования цифрового ортофотоснимка.
Определение координат X,Y узлов полилинии в системе координат цифрового фотоплана по значениям координат xc, yc их изображений в системе координат цифрового изображения снимка производится методом приближений следующим образом.
По координатам xc, yc изображения узла вычисляются координаты x, y изображения узла в системе координат снимка.
В случае если при внутреннем ориентировании цифрового снимка использовались аффинные преобразования, эти вычисления производятся по формулам:
51
x |
a |
|
|
a |
a |
|
x |
|
|
|
|
0 |
|
1 |
|
2 |
|
c |
. |
y |
b0 |
b1 |
b2 yc |
||||||
Затем вычисляются значения координат X, Y узла в системе координат цифрового фотоплана по формулам:
|
X X |
|
Z Z |
|
|
X |
; |
|
|||||
|
|
|
|
|
|||||||||
|
|
|
S |
|
|
|
|
S |
|
Z |
(9.40) |
||
|
|
|
Z Z |
|
|
Y |
|
|
|||||
|
Y Y |
|
|
, |
|
||||||||
|
S |
S |
Z |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||
в которых |
X |
x x0 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Y |
A y |
y0 . |
|
|||||||||
|
Z |
|
f |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
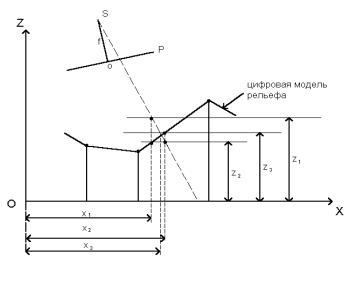
В первом приближении значение высоты узла принимают равной среднему значению высот точек цифровой модели рельефаZ1.
По вычисленным значениям X1,Y1 по цифровой модели рельефа методом билинейной интерполяции, определяют уточненное значение высоты узла Z2. по которому по формулам
(9.36) определяют уточненное значение координат узла X2,Y2. По координатам X2, Y2 узла, в свою очередь, определяют новое значение высоты узла Z3.
Вычисление продолжают до тех пор, пока разность значений координат X и Y узла в приближениях не будут превышать установленного допуска.
Процесс определения координат X,Y узлов полилинии методом приближений представлен на рис. 9.28.
9.10.6. Оценка точности цифровых трансформированных фотоснимков и фотопланов
Созданные в результате цифрового трансформирования снимков цифровые изображения местности по точности должны соответство-
52
вать требованиям, предъявляемым к их точности нормативными документами Роскартографии, если фотопланы предназначены для создания кадастровых и топографических карт (планов) или технического задания на производство работ, если фотопланы создаются для решения других задач.
Контроль созданных трансформированных фотоснимков и фотопланов проводят по расхождениям значений координат контрольных точек, измеренных непосредственно на цифровом плане и координат этих точек, определенных в результате геодезических измерений или в результате построения сети пространственной фототриангуляции.
Вкачестве контрольных точек выбираются только точки, расположенные непосредственно на земной поверхности, так как изображения объектов местности, возвышающихся над ней (крыши домов, мосты и т.п.), имеют на фотопланах искажения.
Контроль фотопланов производится также по расхождениям одноименных контуров расположенных на линии пореза (граничной линии) смежных трансформированных фотоснимков.
Вслучае если трансформированные фотоснимки и фотопланы создавались для создания топографических и кадастровых карт (планов), расхождения в плане положения контрольных точек не должны превышать величины 0.5 мм в масштабе создаваемой карты (плана), а расхождения одноименных контуров на граничной линии величины
0.7мм.
При цифровом трансформировании снимков с целью контроля точности определения элементов ориентирования исходных снимков и точности построения цифровой модели рельефа местности, перед выполнением процесса формирования цифровых трансформированных изображений производят априорную оценку их точности.
Априорная оценка точности производится по контрольным точкам, путем сравнения значений их плановых координат, определенных в результате геодезических или фотограмметрических определений и значений координат расчетного положения изображения контрольной точки на трансформированном изображении.
Определение плановых координат расчетного положения изображения контрольной точки производится по значениям координат изображений контрольных точек на исходных снимках, значениям элементов внутреннего и внешнего ориентирования снимков, параметрам внутреннего ориентирования снимка в системе координат
53
цифрового изображения с использованием цифровой модели рельефа. При этом используется алгоритм, аналогичный алгоритму определения координат углов граничной линии на фотоплане.
При определении координат в качестве начального приближения, используется высота контрольной точки, значение которой было определено в результате геодезических или фотограмметрических определений.
Проведение априорной оценки точности позволяет проконтролировать качество фотограмметрических работ, выполняемых для обеспечения процесса цифрового трансформирования и при необходимости повторить эти процессы.
9.11. Современные цифровые фотограмметрические системы и их основные характеристики
Применение цифровых методов фотограмметрии в практике топографических, кадастровых и других съемок, как и картографического обеспечения геоинформационных и кадастровых систем, стало реальностью сегодняшнего дня. И нет никаких сомнений в том, что вытеснение классических аналоговых методов обработки материалов аэрофотосъемки – задача уже ближайшего будущего. Это обстоятельство и послужило основанием для того, чтобы в действующих инструкциях по фотограмметрическим работам были обозначены как основные задачи, решаемые цифровыми методами, так и критерии их эффективности.
Требования к цифровым фотограмметрическим системам (ЦФС) делятся на общие, технические и технологические.
Общие требования к ЦФС включают такие условия, как строгость алгоритма, максимальная автоматизация процессов обработки, гарантированное решение задачи при наличии теоретической возможности, использование всей геометрической точности исходных изображений, насыщенность алгоритмов логическими операциями контроля полноты и корректности данных, авторская поддержка программных средств и др.
Технические требования определяют главные условия функционирования цифровых систем и в частности – возможность обработки черно-белых и цветных снимков в сжатых и несжатых форматах, отсутствие ограничений на объем памяти и быстродействие ПЭВМ, реализация оптических и электронных средств стереоизмерений и ряд других.
54
Технологические требования к цифровым системам определяют перечень функциональных возможностей систем, наличие которых обеспечивает их эффективную эксплуатацию, в частности:
автоматическое распознавание и измерение изображений координатных меток и выполнение внутреннего ориентирования;
автоматическое стереоотождествление и измерение идентичных опорныхифотограмметрическихточекперекрывающихсяснимков;
автоматическое построение по стереопарам цифровых моделей рельефа;
ортотрансформирование изображений с использованием информации о рельефе, представленной в виде горизонталей, отдельных точек (пикетов), регулярной или нерегулярной ЦМР, формирование выходного ортоизображения с заданным геометрическим разрешениемиавтоматическоевыравниваниеегоплотности;
внутреннее, взаимное и внешнее ориентирование снимков и моделей (маршрутов) по произвольному числу исходных точек (меток, крестов);
сбор цифровой информации об объектах местности в процессе стерео- и моно векторизации (по эпиполярным снимка м и ортоизображению соответственно) с использованием настраиваемого классификатора, ее редактирование с использованием автоматизированных процедур и представление результатов в распространенных форматах.
Внастоящее время имеется достаточно большое число цифровых фотограмметрических систем, из которых можно выделить две
лучшие отечественные Photomod и ТАЛКА.
ЦФС Photomod разработана ОАО «Ракурс» в содружестве с ведущими специалистами России. Система создана в 1993 г. и ныне используется более чем в 40 странах мира.
Photomod – полнофункциональная система с богатейшими возможностями и оригинальным графическим интерфейсом. Используемые системой математические модели позволяют обрабатывать не только наземные и воздушные снимки, полученные по законам центрального проектирования, но и сканерные, радиолокационные изображения, а также снимки, полученные неметрическими камерами. Это одна из немногих фотограмметрических систем на рынке СНГ, позволяющая обрабатывать космические и иные цифровые сканерные изображения, полученные с помощью различных сенсоров.
55
К достоинствам системы относится замкнутый технологический цикл получения всех видов конечной продукции: ЦМР, 3D-векторов, ортофотопланов и цифровых карт без использования других программных продуктов.
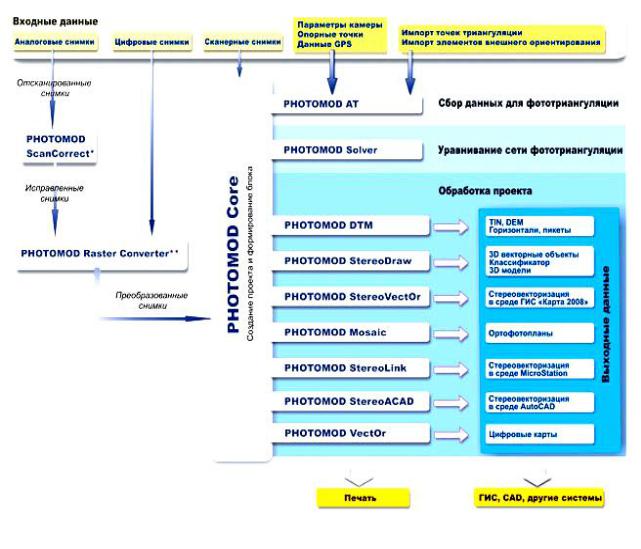
Рис. 9.29. Структура и основные функции системы Photomod
ЦФС Photomod имеет гибкую модульную структуру, обеспечивающую оптимальное соответствие конфигурации задачам пользователя, функционирует в локальной сети и может эксплуатироваться совместно с другими фотограмметрическими системами. Структура системы и основные функции ее компонентов показаны на рис. 9. 29.
Широкое распространение и профессиональное признание системы обеспечили ее богатейшие технологические возможности, основные из которых сводятся к следующему:
оригинальная графическая среда и доступный интерфейс;
56
возможность обработки сканерных спутниковых изображений,
включая снимки SPOT, TERRA, EROS, LANDSAT, IRS, ASTER, ICONOS, QuickBird, GeoEye-1;
наличие интерфейса, обеспечивающего эксплуатацию системы в среде ГИС «Карта 2008» (ГИС «Панорама»), MicroStation/95/SE/J (модуль StereoLink), экспорта данных в геоинформационные и картографические системы и др.;
возможность использования при построении и уравнивании фотограмметрических измерений полного набора систем координат, картографических проекций и данных GPS-измерений;
наличие эффективных средств калибровки планшетных полиграфических сканеров;
наличие настраиваемого классификатора картографических объектов;
применение графических и статистических методов оценки достоверности данных и диагностики ошибок измерений;
возможность формирования ЦМР на регулярной сетке (DEM) с переменным разрешением и использования ее при ортотрансформировании;
наличие эффективных средств оцифровки в монокулярном и стереоскопическом режимах и редактирования полученной гра-
фической (векторной) информации.
Система постоянно совершенствуется (в год появляется 2–3 новых версии), пополняется новыми инструментальными средствами и технологическими возможностями.
ЦФС ТАЛКА разработана в 1996 г. ИПУ РАН под руководством доктора физико-математических наук Д. В. Тюкавкина. Она отвечает производственным требованиям, технологична и изначально хорошо приспособлена для работы с большими объемами данных. К особенности системы можно отнести:
использование «сжатых» изображений, состоящих из точных фрагментов («фотоабрисов») с изображениями точек и пространств между ними с 10-кратным прореживанием;
возможность обработки больших изображений объемом до 4 Гб;
полную автоматизацию стереоизмерений, включая нанесение необходимых точек с использованием четырех режимов отождествления: «грубого» (аффинного), «стандартного» (с обычной корреляцией), «быстрого» (с малой областью поиска) и «надежного» (с поконтурной обработкой);
57
построение маршрутных сетей по перекрывающимся триплетам, их объединение в блок в свободной системе координат с последующим уточнением, ориентирование блока маршрутов по опорным точкам и уравнивание связок проектирующих лучей;
возможность выполнения значительного объёма работ (до 95 % от общего объема) в свободной системе координат;
ортотрансформирование снимков по фрагментам (максимум 128 128), полученным делением рабочей площади на заданное число элементов в зависимости от уклона местности;
возможность выполнения фотометрической коррекции изображения путем локального выравнивания яркостей между фрагментами, глобального выравнивания всего изображения и межпиксельного выравнивания плотности.
Кнедостаткам системы можно отнести скромные графические возможности при векторизации, отсутствие классификатора объектов (что важно при последующем создании оригинала карты или плана) и невозможность построения и измерения анаглифических изображений исходных снимков.
Среди других ЦФС следует отметить системы корпорации
Intergraph, LH-System, (рабочие станции DWP 770) и SOCET SET,
IMAGINE OrthoBase фирмы ERDAS, ЦФС ЦНИИГАиК, Цифровой стереоплоттер SDS (Новосибирск).
Контрольные вопросы
1.Поясните векторную и растровую формы представления изображения объекта.
2.Что определяет выбор элемента геометрического разрешения цифрового изображения?
3.В чём отличие радиометрической характеристики цветного изображения от чёрно-белого?
4.Какой объём памяти необходим для хранения снимка формата 230*230 мм с радиометрическим разрешением 8 бит/пиксел при разрешении 5 мкм?
5.В чём заключается фотометрическая коррекция?
6.Когда возникает необходимость в геометрических преобразованиях растрового изображения?
7.Каковы варианты геометрических преобразований растрового изображения?
58
8.Перечислите источники цифровых изображений.
9.Какие особенности при получении цифровых изображений с помощью съёмочных систем на ПЗС-линейках?
10.Перечислите современные способы стереоскопических наблюдений.
11.В чём заключается принципиальная схема действий при автоматической идентификации точек цифрового изображения?
12.Какие естественные факторы ухудшают качество идентификации образов?
13.Какими способами решается основная задача фотограмметрии при использовании цифровых изображений?
14.С какой целью выполняется внутреннее ориентирование цифровых изображений?
15.Какие точки используются при построении фотограмметрических моделей?
16.Какую схему размещения точек применяют для повышения точности и надёжности взаимного ориентирования снимков?
17.Перечислите критерии качества построения и уравнивания фотограмметрической сети.
18.Назовите основные способы представления цифровой модели рельефа.
19.В чём заключается технология и стратегии построения цифровой модели рельефа с использованием современных цифровых станций?
20.С чем отождествляют зону трансформирования в традиционной и современной цифровой технологиях?
21.Что включает понятие в фотограмметрии трансформирование снимка?
22.Для каких целей, кроме картографирования, используется цифровое трансформирование?
23.Каким образом формируется цифровой фотоплан?
24.Перечислите критерии оценки точности изготовления цифрового фотоплана (ортофотоплана).
25.Дайте основные характеристики современных фотограмметрическим систем (станций).
59
Глава 10. МЕТОДЫ ИНЕРЦИАЛЬНОЙ И СПУТНИКОВОЙ НАВИГАЦИИ
На протяжении продолжительного времени методы решения навигационных задач базировались на определении положения звезд и Солнца, пока на смену компасу, секстанту и хронометру не пришла инерциальная навигационная система (ИНС). Эта система позволяет определить пространственное положение объекта и параметры его движения (ускорение движения, скорость, направление и пр.) автономно, без использования дополнительных данных и вне зависимости от условий наблюдений: под землей, под водой, на закрытой местности и пр. Однако весьма быстрое накопление ошибок позиционирования с помощью навигационной системы требует периодической коррекции его результатов по внешним данным, в качестве которых с 1980-х годов начали использовать данные спутниковых измерений. Это обстоятельство, а также применение фильтра Калмана для совместной обработки данных, содержащих погрешности и полученных с использованием различных физических принципов, послужило толчком к разработке и использованию интегрированных систем инерциальной и спутниковой навигации.
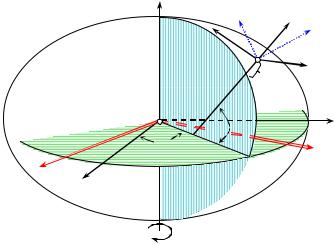
10.1. Координатные системы, используемые в инерциальной и спутниковой навигации
Важнейшей особенностью
Z, ZИ
ZГ
Б
YГ
XБ 
OHГ
O
B
L
XИ
инерциальной навигационной систе-
|
|
|
|
мы является возможность оп- |
||
|
|
|
|
ределения с ее помощью па- |
||
|
|
|
|
раметров движения (скоро- |
||
|
|
ZБ |
|
|||
|
|
|
|
сти, ускорения, направления, |
||
|
|
|
|
|||
|
XГ |
|
координат на определенный |
|||
|
|
|
||||
|
|
Y |
|
момент времени и пр.) отно- |
||
|
|
|
|
сительно некоторой первона- |
||
YИ |
|
чально |
выбранной |
системы |
||
|
|
|
|
отсчета, которая, естествен- |
||
|
|
|
|
но, в процессе измерений |
||
|
|
|
|
должна |
оставаться |
непод- |
|
|
|
|
вижной. Поэтому в общем |
||
|
|
|
|
случае |
для решения |
навига- |