

2438
.pdfционных задач с помощью спутниковых и инерциальных навигационных систем используются несколько координатных систем: геоцентрическая, инерциальная, местная (горизонтная), транспортного средства (самолета, автомобиля и др.), блока инерциальных измерений и некоторые другие (рис. 10.1).
Геоцентрическая система координат OXYZ используется для обработки результатов спутниковых измерений и отождествляется с системой координат ПЗ-90.02 или WGS-84, в зависимости от того, какая именно спутниковая навигационная система используются при навигации (GPS или ГЛОНАСС).
Начало системы O совмещается с центром земных масс, ось OZ
– с осью вращения планеты, ось абсцисс OX размещена в плоскости Гринвичского меридиана, а ось ординат OY дополняет систему до правой. Система OXYZ вместе с планетой вращается вокруг оси OZ с угловой скоростью 7,292115 10-05 радиан в секунду.
Система геодезических эллипсоидальных координат (B, L, H) используется наряду с геоцентрической системой координат для определения положения точек через широту, долготу и высоту.
Горизонтная (навигационная) система координат OГXГYГZГ используется для представления результатов обработки инерциальных или спутниковых данных, необходимых для решения некоторых задач (в частности, определения пространственного положения самолета, угловых элементов внешнего ориентирования аэроснимков). Начало OГ этой системы совмещается с текущим (мгновенным) положением центра блока инерциальных датчиков, ось OГZГ – с нормалью к эллипсоиду, ось OГYГ указывает на север вдоль местного меридиана, а ось OГXГ дополняет систему до правой.
Положение горизонтной системы координат относительно геоцентрической известно, если известны геодезические или геоцентрические координаты ее начала.
Бортовая система координат OБXБYБZБ связана с корпусом перемещающегося в пространстве транспортного средства (самолета, автомобиля и пр.). Ее начало размещается в центре тяжести носителя (самолета, автомобиля), ось аппликат OБZБ – с отвесной линией, ось ординат OБYБ – с продольной осью транспортного средства, а ось абсцисс OБXБ дополняет систему до правой.
Система координат аэроснимка Sxyz (на рис. 10.1 не показана) связана с пространственным положением фокальной плоскости аэрокамеры. Ее начало размещено в центре проекции, ось Sz совпадает с
61
продолжением главной оптической оси объектива, а оси Sx и Sy параллельны осям снимка ox и oy (при аналоговой аэросъемке) или соответствует ориентации светочувствительных датчиков изображения. Определение пространственной ориентации этой системы и является задачей блока инерциальных измерений.
Система координат блока инерциальных измерений (на рис. 10.1 не показана) используется для выполнения инерциальных измерений, и ее пространственное положение определяет направления осей чувствительности гироскопов и акселерометров. Взаимное положение этой системы относительно «целевой» в виде смещений вдоль координатных осей и трех углов наклона определяют в процессе выставки инерциальных приборов и уточняют по результатам обработки данных, полученных на специальном полигоне. Причем, «целевой» считается система координат аэроснимка Sxyz, бортовая система координат OБXБYБZБ или какая-либо иная, определение ориентации которой является задачей инерциальной системы.
Инерциальная система координат OXИYИZИ (рис. 10.1) представляет собой геоцентрическую систему координат OXYZ, зафиксированную на момент включения навигационной системы в рабочий режим и не участвующую в суточном вращении Земли.
10.2. Инерциальные навигационные системы
Принципы аналитического и геометрического решения задачи инерциальной навигации были сформулированы Р. Вуссовом (1905 г.), М. Керри (1903 г.) и В.В. Алексеевым (1911 г.), которые и получили соответствующие патенты; началом ее практической реализации считаетcя разработка системы управления немецкой баллистической ракетой ФАУ-2. Однако создание работоспособных алгоритмов обработки информации в системах инерциальной навигации потребовало больших усилий целых научных коллективов математиков и механиков СССР, США и некоторых стран Западной Европы.
Развитие науки и техники привело к разработке достаточно точных и эффективных инерциальных приборов и систем, способных решать самые разнообразные задачи, связанные с обеспечением полетов самолетов и космических кораблей, перемещением автомобилей и морских судов. Причем в целом ряде случаев (например, при навигации подводных лодок, работах под землей и пр.) никакие иные навигационные средства не могут быть применимы в принципе.
62
С появлением во второй половине прошлого столетия систем глобального позиционирования некоторые специалиста полагали, что методы инерциальной навигации исчерпали свои возможности и завершили свое развитие, передав эстафету спутниковым навигационным системам. Жизнь, однако, показала, что это не так.
10.2.1. Общие принципы инерциальной навигации
Инерциальная навигация базируется на использовании достаточно простых положений, заключающегося в том, что ускорение движения объекта wi, как и его скорость Vi, характеризуются величинами и направлением, т.е. являются векторными переменными. Поэтому если в процессе движения объекта непрерывно выполнять измерение мгновенных ускорений вдоль координатных осей (wX, wY, wZ), то их сумма даст скорости перемещения вдоль тех же осей (VX, VY, VZ), а сумма мгновенных скоростей– координаты объекта (X, Y, Z) на момент времениt.
Заменив суммирование дискретных величин интегрированием, получим математическую модель навигации в виде
|
|
|
t |
|
|
|
|
|
t |
|
|
|
|
|
t |
t |
|
|
|
|
VX |
0 |
|
|
|
X X0 |
VXi |
dt X |
|
|
|
|
|
|
|
||||||
VX |
wXi dt, |
0 wXi dtdt, |
|
|||||||||||||||||
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
0 |
0 |
|
|
|
|
|
0 |
|
t |
|
|
|
|
t |
|
|
|
|
t |
t |
|
|
|
|
||
VY |
wYi dt, |
|
Y Y0 |
VYi |
dt Y0 |
wYi |
dtdt, |
|
, (10.1) |
|||||||||||
VY |
|
|
||||||||||||||||||
|
|
|
t |
|
|
|
|
|
t |
|
|
|
|
0 |
t |
t |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
V |
V0 |
|
|
w dt, |
|
Z Z |
|
|
|
V |
|
dt Z |
|
|
|
w dtdt |
|
|
||
Z |
Z |
|
Zi |
|
|
0 |
|
|
Zi |
0 |
|
|
Zi |
|
|
|||||
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
0 |
0 |
|
|
|
|
где верхний индекс «0» обозначает значение соответствующего параметра (координат объекта и скорости) в начале измерений (t = 0).
Таким образом, при известных начальных условиях (скорости и положения в пространстве) можно автономно и без привлечения дополнительной информации определить пространственное положение движущегося объекта. Для этого на его борту достаточно поместить прибор, позволяющий измерять проекции возникающих ускорений на координатные оси некоторой системе координат. Такой прибор, называемый акселерометром (accelero – ускоряю, лат.), должен иметь три оси чувствительности, ориентированных параллельно координатным осям X, Y, Z некоторой неподвижной (инерциальной) системы.
Изменение направления движения регистрируется с помощью гироскопов, ориентированных по координатным осям и обеспечи-
63

вающих акселерометры данными об ориентации координатных осей инерциальной системы координат.
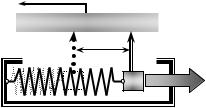
В общем случае показания акселерометра искажаются из-за влияния гравитационного поля Земли, для компенсации которого необходимо вычесть из измеренного значения ускорение свободного падения g. Поэтому для корректной обработки используется вычислительный блок с обратной связью (рис. 10.2), в котором решается уравнение движения, описываемое вторым законом Ньютона [8]:
|
|
|
d2 |
r |
|
|
|
|
|
|
|
|
|
|
|
F( |
r |
), |
(10.2) |
||||
|
|
M |
|||||||||
|
dt2 |
||||||||||
|
|
|
|
|
|
M |
|
||||
|
|
|
|
|
|
|
|
|
|||
где – измеренное кажущееся акселерометром ускорение; r – вектор центра тяжести измерительного блока M; F – сила притяжения единицы массы измерительного блока (ускорение тяготения).
С учетом этого инерциальная система и ее вычислительный блок (рис. 10.2) должны последовательно выполнить:
Кажущееся |
Интегрирова- |
Скорость |
Повторное |
Координаты |
|
ускорение |
ние |
|
интегриро- |
||
|
уравнения |
|
вание урав- |
|
|
|
движения |
|
|
нения |
|
Ускорение |
|
Модель |
|
|
|
|
силы |
гравитацион- |
|
|
|
тяжести g |
ного поля |
|
|
||
Рис. 10.2. Модель вычислительной обработки данных
измерение акселерометром кажущегося ускорения, в которое полностью или частично входит ускорение свободного паденияg;
интегрирование функции (10.2), определение скорости движения и координат объекта в инерциальной системе координат согласно формулам (10.1);
определение ускорения свободного падения g по текущим координатам и на основе известной модели гравитационного поля;
вычитание найденного ускорения g из измеренного значения и уточнение параметров движения вторым приближением.
На выходе системы получаются координаты центра тяжести из-
мерительного блока в инерциальной системе координат, скорость перемещения объекта и его ускорение.
64
Впервых инерциальных системах для исключения влияния гравитации на сигнал акселерометра ось его чувствительности размещали в горизонтальной плоскости, для чего использовалась стабилизированная платформа, которая с помощью карданного подвеса изолировалась от поворотов подвижного объекта, что и обеспечивало стабильность ориентации акселерометров относительно Земли.
Внастоящее время используются преимущественно бесплатформенные системы навигации, в которых учет влияния наклонов платформы на показания гироскопов и акселерометров, а также интегрирование уравнения движения (10.2), определение ускорения, скорости движения, координат объекта и мгновенных углов ориентации платформы выполняются с помощью бортового компьютера.
10.2.2. Базовые элементы инерциальных навигационных приборов
Основой инерциальной навигационной системы являются установленные на платформу тройки акселерометров и гироскопов, оси чувствительности которых ориентированы по координатным осям целевой системы координат. Рассмотрим конструктивные особенности этих приборов.
Акселерометр (от лат. accelero «ускоряю» и греч. μετρεσ «измеряю») предназначен для измерения возникающих на движущихся объектах ускорений (перегрузок), которые необходимы для счисления пути. Акселерометры различаются:
по виду исследуемого движения (датчик линейный или угловой скорости, ускорения и др.);
по принципу действия (механический акселерометр, электромеханический и др.);
по назначению (для измерений ускорения и определения скорости и ускорения, определения местоположения и др.),
Так, в механическом акселерометре с одной осью чувствительности ускорение воспринимается маятниковым устройством, отклонение которого от положения равновесия фиксируется с помощью стрелки-указателя, потенциометра и пр. В электромеханическом акселерометре ускорение воспринимается специальным датчиком, изменяющим свой параметр (сопротивление, емкость и пр.) пропорционально воздействию внешней силы, и фиксируется, например, на осциллографе.
65
Простейший механический маятниковый акселерометр (рис. 10.3) представляет собой инерционную массу m (например, грузик), которая через упругую пружину связана с корпусом прибора. Под воздействием ускорения масса m перемещается вдоль оси чувстви-
|
U |
|
|
|
тельности l1l2 и сжимает (растягивает) |
|||
|
|
потенциометр |
|
|||||
|
|
|
пружину. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Величина смещения инерционной |
|
|
|
|
|
|
|
|
|
|
l |
|
|
m |
|
|
2 m ускорение |
массы регистрируется датчиком переме- |
|
|
|
Рис. 10.3. Схема |
щения (потенциометром), вырабатываю- |
|||||
|
|
щим сигнал U, величина напряжения кото- |
||||||
|
|
маятникового |
рого пропорциональна этому смещению |
|||||
|
|
акселерометра |
||||||
(связь показаний потенциометра и силой натяжения пружины устанавливается при изготовлении и тарировании прибора). Усиленный сигнал используется для выработки противодействующей силы пружины, что позволяет возвратить грузик в исходное положение. Тем самым осуществляется мгновенная реакция акселерометра на возникающие ускорения путем измерения и регистрации данных. На основе этой информации определяется мгновенное ускорение, скорость перемещения объекта и его мгновенное пространственное положение.
Акселерометры характеризуются стабильностью масштабного коэффициента (нелинейностью), чувствительностью и диапазоном измерений, причем, два первых параметра определяют точность работы системы в целом, класс прибора и возможности его использования для решения конкретных задач.
Точность показаний акселерометра определяется погрешностями измерения ускорения, и, следовательно, зависит от точности регистрации смещений чувствительной массы, сил трения, параметров жесткости пружины (для механических приборов) и пр.
Уменьшение погрешностей измерений достигается снижением трения в элементах конструкции акселерометра. С этой целью инерционную массу m акселерометра (рис. 10.3) помещают на бесконтактном подвесе в электрическое или магнитное поле, вакуум или в жидкость с большим удельным весом (для уравновешивания массы m гидростатическими силами) и пр. Точность измерения ускорения современными акселерометрами сопоставима с точностью полевых гравиметров и достигает 0,1 мГал (10−7g).
Гироскоп (греч. γυρο – «вращение» и σκοπεω – «смотрю», «наблюдаю») используется в инерциальной навигации для воспроизведе-
66
ния системы отсчёта путем определения углов поворота и наклона платформы. Прибор был предложен в 1852 г. французским ученым Леоном Фуко для демонстрации вращения Земли вокруг своей оси. Обычно он представляет собой вращающийся маховик, помещенный в кардановый подвес, поэтому долгое время слово «гироскоп» использовалось для обозначения быстро закрученного вращающегося симметричного твердого тела.
Простейшим, с детства знакомым гироскопом является волчок, стремящийся сохранить направление своей оси в пространстве. Такой гироскоп называется позиционным и используется для стабилизации положения платформы (или аэрокамеры).
Винерциальной навигации находят применение гироскопы – датчики угловой скорости (ДУСы), у которых, в отличие от позиционных гироскопов, ось вращения зажата, и при повороте платформы возникает кориолисова сила, величина которой пропорциональна угловой скорости; ее интегрирование по времени позволяет вычислить угол наклона соответствующей координатной оси.
Области применения гироскопов достаточно разнообразны, поскольку с их помощью можно определять угловые отклонения от заданного направления и угловые скорости перемещения, стабилизировать положение объектов в пространстве и пр.
Внастоящее время создано ряд конструкций гироскопов, в частности [37]:
поплавковые с погруженными в жидкость элементами и ротором, вращающимся на воздушной подушке в аэродинамических подшипниках при практически полном отсутствии трения;
кольцевые лазерные гироскопы (RLG – Ring Laser Gyroscope), в которых угол отклонения оси чувствительности определяется на основе эффекта интерференции встречных волн, распространяющихся по замкнутому кругу;
волоконно-оптические (FOG – Fiber-Optic Gyroscope), исполь-
зующие аналогичный эффект распространения встречных волн в многовитковой катушке оптического волновода, частью которого является свернутое в спираль оптическое волокно;
микромеханические, построенные по технологии MEMS (Micro Electro Mechanical Systems) или iMEMS (интегральные MEMS) и
представляющие собой выполненную на одном кристалле кремния интегральную микросхему малого размера и веса (рис. 10.4). Низкая стоимость и малые размеры таких гироскопов открывают возмож-
67

ность их широкого применения в автомобилях, телескопах, персональных компьютерах, мобильных робототехнических устройствах, детских игрушках и пр.
Погрешности работы гироскопа характеризуются стабильностью масштабного коэффициента, измеряемой в процентах, и дрейфом (скоростью ухода его оси от первоначального положения), измеряемым в градусах в час ( /час).
Численные значения этих показателей определяются особенностями конструкции гироскопа и составляют [37]:
стабильность масштабного коэффициента: от 10 – 100 % у кварцевых, кремниевых и микромеханических гироскопов, до 10-4 – 10-5 % у волоконно-оптических и лазерных гироскопов;
дрейф: от 1 – 100 /час у механических и микромеханических гироскопов до 10-3 – 10-5 у электростатических, поплавковых и кольцевых лазерных гироскопов.
Значительные погрешности работы гироскопов требуют коррек-
ции их показаний, способ выполнения и периодичность которой определяется величинами погрешностей измерений. В последние годы для этой цели используются спутниковые системы GPS и ГЛОНАСС, что объясняет повышенный интерес к интегрированным навигационным системам, объединяющим инерциальные и спутниковые измерения.
10.2.3. Инерциальные измерительные блоки
При промышленном изготовлении инерциальных приборов акселерометры и гироскопы объединяются в один блок, который устанавливается на подвижном объекте (самолете, автомобиле, беспилотном летательном аппарате и др.) и жестко скрепляется с его основанием так, чтобы любые перемещения и изменения пространственной ориентации транспортного средства были зафиксированы измерительным блоком.
Измерительный блок представляет собой бесплатформенную инерциальную систему, объединяющую две тройки ориентированных по координатным осям измерительных приборов (акселерометров и гироскопов), и называется IMU (Inertial Measurement Unit, инерциальное измерительное устройство) или INS (Inertial Navigation System,
инерциальная навигационная система, ИНС). Сбор измерительных
68

данных выполняется через стандартные последовательные (СОМ) порты или разъемы (RS-232, RS-422 и др.). Аналогичные по назначению приборы российских компаний ориентированы преимущественно на использование их для управления беспилотными летательными аппаратами, навигационное обслуживание автомобильного транспорта и иные сходные по характеру задачи, и потому здесь не рассматриваются.
Наиболее известными компаниями, поставляющими инерциальные измерительные блоки для геодезических измерений, являются
Honeywell (США), Northrop Grumman (США), iMAR (Германия) и др.
Их технические характеристики даны в табл. 10.1, а внешний вид – на рис. 10.5.
a) |
|
б) |
в) |
|
|
|
|
Рис. 10.5. Блоки инерциальных измерений: HG1700 (а), LH200 (б) и MAR-FSAS (в)
|
|
|
Таблица 10.1 |
|
Параметр |
HG1700 (Honey- |
LH200 (Northrop |
FSAS (iMAR, |
|
well, США) |
Grumman, США) |
Германия) |
||
|
||||
Акселерометры: тип |
кварцевые |
кремниевые |
серво |
|
дрейф, мГал |
нет данных |
0,3 |
1,0 |
|
Гироскоп: тип |
КЛГ (RLG) |
ВОГ (FOG) |
ВОГ (FOG) |
|
дрейф, /час |
1 – 5 |
1 – 10 |
0,75 |
|
масштаб, ppm |
150 |
100 |
300 |
|
ошибка измерения |
47 / 112 |
36 / 90 |
54 / 147 |
|
наклона / курса, |
||||
|
|
|
||
Периодичность |
100 |
200 |
200 |
|
измерений, Гц |
|
|
|
|
Наработка на отказ, час |
2000 |
20000 |
35000 |
|
Габариты, мм |
193 167 100 |
157 135 140 |
128 128 104 |
|
Масса, кг |
3,4 |
3,0 |
2,1 |
69
Данные табл. 10.1 показывают, что измерения с помощью инерциальных блоков могут выполняться с точностью, достаточной для создания съемочного обоснования; периодическая коррекции их показаний по опорным точкам или иным внешним данным или совместная их обработка приводит к повышению точности решения в 1,5–3 раза.
10.2.4.Обработка инерциальных данных
Вцелом технологическая схема обработки данных, полученных
спомощью акселерометров и гироскопов, соответствует рассмотренной выше (10.2) с учетом назначения системы.
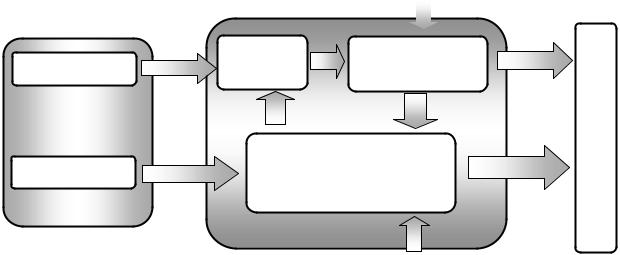
Так, если инерциальная система является частью системы управления полетом летательного аппарата, то ее главной задачей является непрерывная регистрация тангажа, крена и курса с отображением их на соответствующих приборах или (на беспилотных аппаратах) выработка соответствующих противодействующих усилий [37]. Функциональная схема такой системы представлена на рис. 10.6.
Начальные условия 
|
nC |
БЛОК |
nG |
АЛГОРИТМ |
X, Y, Z, V |
3 акселерометра |
ПЕРЕСЧЕТА |
НАВИГАЦИИ |
|||
|
|
C |
|
G |
|
|
|
АЛГОРИТМ ОРИЕНТАЦИИ |
, , |
||
3 гироскопа |
VX,VY,VZ |
(расчет углов Эйлера и направ- |
|||
|
ляющих косинусов) |
|
|||
|
|
|
|
||
БЛОК ИЗМЕРЕНИЙ
ВЫЧИСЛИТЕЛЬ
Панель приборов управления полетом
Начальныеусловия
Рис. 10.6. Принципиальная схема работы инерциальной навигационной системы
При выставке инерциальной системы платформа с блоком измерений приводится в горизонтальное положение и ориентируется относительно носителя. В дальнейшем все параметры полета (углы, скорость, ускорение, координаты и пр.) будут определены относительно этого положения.
70