

2438
.pdfвания f, что будет обеспечено равенство продольного и поперечного расстояний междусоседними лазерными точками.
Развертка с использованием оптического клина также не отличается особой гибкостью. Кроме того, при использовании этого метода наблюдается наибольшая неравномерность распределения лазерных точек, причем минимальная плотность приходится как раз на середину полосы захвата, т.е. на ту область, которая и представляет наибольший интерес. Однако, сканирование с использованием оптического клина имеет одно важное преимущество. При реализации этого метода каждый участок полосы съемки сканируется дважды – при подлете и при отлете от этого участка. Такая особенность, вопервых, позволяет получать отклики от вертикально расположенных объектов, таких как стены здания, стволы деревьев или опоры ЛЭП, а, во-вторых, создает исключительно благоприятные условия для самокалибровки лидара.
Возможность получения откликов от вертикально расположенных объектов имеется и при реализации других схем сканирования. Так в лидарах типа ALTM, использующих метод качающегося зеркала, предусмотрена возможность установки сканерного блока в наклонное положение до 30° от надира. Такое положение используется наиболее часто при съемке ЛЭП.
Также следует упомянуть о волоконно-оптическом методе развертки, предлагаемой компанией TopoSys.
11.6.Лазерное сканирование и цифровая аэрофотосъёмка города Омска
Для лазерного сканирования и цифровой фотосъёмки города Омска использовалась комплексная система компании Leica Geosystems, в которую входили воздушный лазерный сканер ALS50-II и цифровая аэрофотокамера LEICA RCD 39 Mпикс.
При планировании работ по объекту были учтены следующие факторы:
сжатые сроки проведения работ;
протяженность и форма границ объекта;
сложная авиационная обстановка, наличие зон запретных для полетов и дифференцированных высотных коридоров;
погодные условия, характерные для осеннего периода: частая облачность и периодические осадки;
перепад высот рельефа на объекте (до 200 м);
141
наличие в районе проведения работ сети постоянно действующих GPS станций.
Полевая часть работ по воздушному лазерному сканированию и цифровой аэрофотосъемке на площади 430 км2 выполнена за 15 дней.
На борту воздушного судна совместно с воздушным лазерным сканером ALS50-II, цифровой аэрофотокамерой 39 Mpix в комплексе с инерциальной системой использовался спутниковый двухчастотный GPS приемник фирмы Novatel модель OEM4, с частотой регистрации измерений 2 Гц (2 измерения в секунду).
Для дифференциальной коррекции GPS траекторий полета воздушного судна при проведении ВЛС и АФС необходимым условием является наличие наземного геодезического GNSS сопровождения. Рекомендуемое удаление воздушного судна от наземных GNSS станций при проведении ВЛС и АФС составляет 30 км (технология компании Leica Geosystems). Этому условию удовлетворяло расположение сети референцных станций ВИСХАГИ. Характеристика фактической точности сети референцных станций ВИСХАГИдана в главе 13.
Обрабатывались два набора измерений:
статические – GNSS измерения опознаков;
кинематические – GNSS измерения траекторий полета воздушного судна во время выполнения ВЛС и АФС.
Вычисление координат опознаков выполнялось с использованием
программного обеспечения SkiPro, система координат МСК-55-2008, система высот Балтийская 1977 года. СКО положения опознаков в местной системе координат составила 3 см в плане и 5 см по высоте.
Дифференциальная коррекция траектории выполнялась с использованием измерений, полученных GNSS приемниками сети референцных станций в программном обеспечении GrafNav7.80 фирмы Waypoint Group. СКО положения траекторий полета воздушного судна при проведении ВЛС и АФС не превышала 10 см (Estimated Position Accuracy). При расчете траекторий были использованы измерения с 5-ти референцных станций ВИСХАГИ. Съемка производилась с высоты 600 м. Расчетная точность и параметры ВЛС и АФС представлены в табл. 11.1 и 11.2.
Характеристика фактической точности рельефа ЦТП (сечение 0,5 метра), полученного по результатам лазерного сканирования, приводитсяв главе 13.
Блок-схема технологии создания и обновления ЦТП по материалам ЦАФС и ВЛС дана в прил. № 2.
142
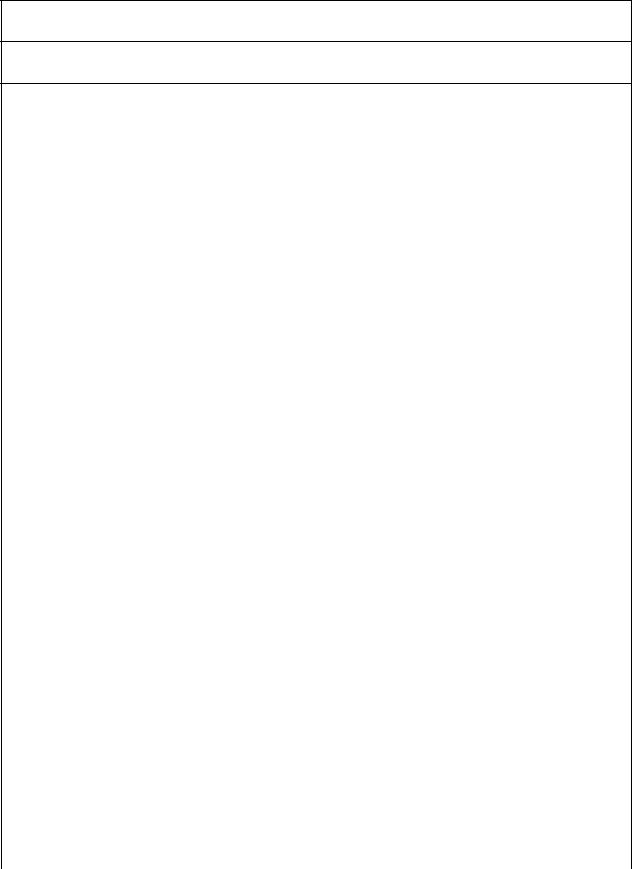
Таблица 11.1
Расчеты на аэросъёмку и лазерную локацию г. Омска для выпуска топографического плана М 1:500. Площадь 430 кв. км.
Носитель самолёт Ан -2, комплексная система компании Leica Geosystems:
Лазер ALS50-II, Фотокамера LEICA RCD 39 Mпикс
Максимальная Расчетная путевая скорость, км/час |
|
140 |
|
Среднестатистическая скорость аэросъемки, км/час с учетом под- |
80 |
||
|
|
|
|
Заданная площадь аэросъемки (Длина км х Шир м) |
25 |
17000 |
|
Расчетная точность пилотирования по заходу, ± м |
|
100 |
|
Требуемая относительная плановая точность лазера, м |
|
0,25 |
|
Требуемое разрешение в пикселе по фото, м |
|
0,10 |
|
Расчетная высота аэросъемки по плановой точности лазера |
625 |
||
Расчетная высота аэросъемки по разрешению ФОТО Midipix CH- |
882 |
||
Требуемая полоса лазерной аэросъемки с учетом точности |
17100 |
||
пилотирования |
|
|
|
Принятая высота аэросъемки, м |
|
600 |
|
Принятый половинный угол сканирования,град (Макс. 35град) |
28 |
||
Расчетная относительная плановая точность лазера, м |
3δ |
0,24 |
|
Расчетная относительная высотная точность лазера, м |
3δ |
0,12 |
|
Лазерное сканирование ALS50-II |
|
||
|
|
|
|
Половинный угол сканирования (0 - 35 град) |
|
28 |
|
Заданная частота зондирования (0 - 150000 Гц) |
|
150000 |
|
Максимальная расчетная частота сканирования (0 - 90 Гц) |
54 |
||
Заданная частота сканирования (F<макс F) |
|
50 |
|
Расчетный Угол сноса, град |
|
20 |
|
Расчетное Поперечное перекрытие между заходами, % |
|
30 |
|
Результат |
|
|
|
Полная Поперечная полоса захвата на земле, по оси |
|
ШТИЛЬ |
СНОС |
Y, м |
|
638 |
559 |
Поперечное перекрытие по оси Y, м, ≥Точн. пил. |
|
ШТИЛЬ |
СНОС |
|
191 |
168 |
|
|
|
||
Поперечный рабочий захват по оси Y,м |
|
447 |
391 |
Ср. Плотность точек на 1 кв.м поверхности |
|
зад Fск |
6,05 |
Разрешение по оси X, м |
|
0,7 |
|
Разрешение по оси Y, м |
|
0,21 |
|
143
|
|
|
Таблица 11.2 |
Фотокамера Leica MIDIPix RCD 109 39Mпикс |
|
по полету |
|
|
Широкая |
|
Узкая |
Размер матрицы, мм |
49,07 |
|
37,2 |
Размер матрицы, пиксел |
7216 |
|
5472 |
Фокусное расстояние объектива, мм (35, 60 мм) |
|
60 |
|
Заданное Продольное перекрытие, % |
|
60 |
|
Заданное Поперечное перекрытие между заходами, |
|
20 |
|
Результат |
|
|
|
Поперечная полоса захвата на земле по Y,м |
490,7 |
|
372,0 |
Продольная полоса захвата на земле по X,м |
372,0 |
|
490,7 |
Продольное перекрытие по X,м |
223,2 |
|
294,4 |
Поперечное перекрытие по Y,м |
98,1 |
|
74,4 |
Продольный рабочий захват по X,м |
148,8 |
|
196,3 |
Поперечный рабочий захват по Y,м |
392,6 |
|
297,6 |
Разрешение в пикселе, м |
0,068 |
|
0,068 |
Рабочий интервал аэросъемки, сек |
4,5 |
|
5,9 |
Численный масштаб аэрофотосъемки |
1 |
|
10000 |
Линейный масштаб аэрофотоснимка, см/м |
1 |
|
100 |
Контрольные вопросы
1.Что является основой комплексной технологии лазерной локации и цифровой аэрофотосъёмки?
2.Перечислите основные этапы выполнения лазернолокационных аэросъёмочных работ.
3.Что входит в комплект аэрофотосъёмочного оборудования при выполнении комплекса работ по ЛЛ и ЦА?
4.В чём заключается геодезическое обеспечение аэросъёмочных работ для выполнения ЛЛ?
5.Из каких двух блоков состоит система лазерного локатора?
6.Какая информация используется для вычисления точных координат отражения импульсов лазерного излучения?
7.Что лежит в основе синхронизации лазерного сканирования и цифровой аэрофотосъёмки?
8.Перечислите элементы полевого контроля выполнения ЛЛ и ЦА.
9.Назовите состав процессов камеральной обработки ЛЛ и ЦА.
10.Какую обработку аэросъёмочной информации позволяет выполнить программный комплекс ALTEXIS?
144
11.Какие параметры необходимо определить для калибровки комплексной аэросъёмочной системы ЛЛ и ЦА?
12.Что выполняется в ходе калибровочной процедуры?
13.В каких наиболее неблагоприятных условиях (с точки зрения аэрофотосъёмки) достигается наибольшая экономическая эффективность ЛЛ?
14.Какую дополнительную информацию позволяет получать регистрация до четырёх откликов для каждого зондирующего импульса лазера, кроме картографирования объекта?
15.Перечислите достоинства и недостатки ЛЛ метода съёмки.
16.Какие векторные пространства и вектора представляют общую схему компоновки бортового аэросъёмочного комплекса?
17.Каким образом определяются пространственные координаты сканерного блока?
18.С помощью какого устройства определяется угловая ориентация сканерного блока?
19.В какой системе координат работает навигационный компьютер?
20.Какие параметры необходимо определить для перехода от вектора, определяющего положение антенны, к вектору, который определяет положение точки центра сканирования в СК объекта?
21.Что определяет параметр – фаза сканирования?
22.В результате постобработки какими пространственными данными обеспечивается каждое первичное лазернолокационное измерение?
23.Перечислите компоненты, входящие в уравнение связи, по которому выполняется расчёт координат всех лазерных точек.
24.Какие структурные компоненты входят в бортовой навигационный комплекс лазерного локатора?
25.Какова длина волны лазерного излучения, какое обоснование такого выбора?
26.Что используется в современных лазерных локаторах в качестве основного оптического элемента развёртки?
27.В чём преимущества развертки с качающимся зеркалом?
145
Глава 12. СИСТЕМЫ НАЗЕМНОГО МОБИЛЬНОГО ЛАЗЕРНОГО СКАНИРОВАНИЯ
12.1.Особенности и преимущества наземных мобильных систем
Используемое на западе название «системы мобильного картографирования» СМК является дословным переводом англоязычного термина «mobile mapping systems». Иногда также в западной литературе используется термин «mobile mapper». Его можно не вполне корректно перевести как «мобильный картограф». И в том, и в другом случае используемые названия нельзя признать удачными, по крайней мере, они никак не вписываются в отечественную традицию, которая уже на уровне терминологическом четко разграничивает работы по топографо-геодезической съемке и по составлению карт. В нашем российском понимании это безусловно связанные, но ни в коем случае не тождественные виды деятельности.
Российские специалисты рассматривают СМК как сложный
топографо-геодезический инструмент, включающий в себя ин- формационно-измерительные и вычислительные средства, самодвижущуюся платформу, а также совокупность программных и методических средств, предназначенных для выполнения топографической съемки земной поверхности.
Главной отличительной чертой СМК, как средства топографической съемки, является наличие в ее составе сканирующего лазерного дальномера (лазерного сканера), а также возможность работы в динамическом режиме, то есть в процессе движения платформы. Последнее обстоятельство существенным образом отличает методологию выполнения съемки СМК от съемки с использованием традиционных наземных лазерных сканеров в статическом положении. По этой причине в России существует ещё одно название – Мобильные Сканирующие Системы (МСС), которое подчёркивает динамический характер инструмента данной съёмки, в принципе, это название
можно отнести как к наземному, так и к воздушному лазерному сканированию.
Создание наземных мобильных сканирующих систем является дальнейшим развитием технологии наземного лазерного сканирования за счёт фактической модернизации и внедрения основных элементов технологии воздушного лазерного сканирования (ВЛС), на-
146
правленными на увеличение производительности, повышение качества и комфортности проведения полевых и камеральных работ. Только в качестве движущейся платформы здесь используются наземные средства передвижения: автомобили, железнодорожные дрезины и локомотивы, речные и морские суда, причем в современных моделях рабочая скорость движения платформы достигает магистральной скорости в 100 км/ч.
Сбор пространственной информации с помощью мобильного лазерного сканера был бы невозможен без интегрального объединения и совместной обработки трех потоков данных:
GPS траектория движения платформы;
Position and Orientation System (POS) угловая ориентация платформы;
LIDAR дальномерных лазерных измерений.
Все виды данных подвергаются совместной обработке с помощью специального программного обеспечения, которое позволяет за счёт интеграции спутниковой и инерциальной навигационных систем (GPS IMU) достаточно точно получать элементы внешнего ориентирования сканерного блока на каждый момент времени, а затем и пространственные координаты точек ХР, УР, ZР снимаемых объектов и в конечном счёте получать трехмерные цифровые модели местности.
На рис. 12.1 мы видим схему получения исходных данных и их обработку.
1.Бортовой GPS приемник регистрирует траекторию движения автомобиля. GPS данные подвергаются дифференциальной коррекции на основе данных неподвижной базовой GPS станции.Спутниковыеданныеобновляютсясчастотой2 20Гц.
2.Инерциальная система обеспечивает измерение и регистрацию параметров угловой ориентации платформы. Инерциальные данные обновляются с частотой от 200 до 500 Гц, т.е. значительно чаще, чем спутниковые, но имеют дрейф.
3.Лазерные импульсы отражаются от поверхности земли, зданий, объектов инфраструктуры и др., регистрируются приемником излучения и преобразуются в цифровую форму.
4.Продольная развертка осуществляется за счет движения платформы.
5.Каждый из сканеров реализует развертку и при отсутствии препятствий обеспечивает получение съемочных данных в радиусе, который доступен для данной модели, например до
147
100 м (модель VI00), до 200 м (модель V200) или 300 м для системы StreetMapper 360.
Оновл. |
Обновление 20 Гц |
500 Гц |
Рис. 12.1. Схема получения исходных данных, их обновления и обработки
Для того чтобы объединить отдельные «облака точек», полученные в движении, в единое «облако точек» в заданной системе координат, например, в WGS-84, наземные лазерные сканеры объединены с интегральным навигационным комплексом GPS/IMU, включающем спутниковый навигационный приемник GPS и инерциальную систему [3]. Такой комплекс позволяет определять положение и ориентацию мобильной платформы, на которой устанавливается наземный лазерный сканер, в геоцентрической системе координат WGS-84.
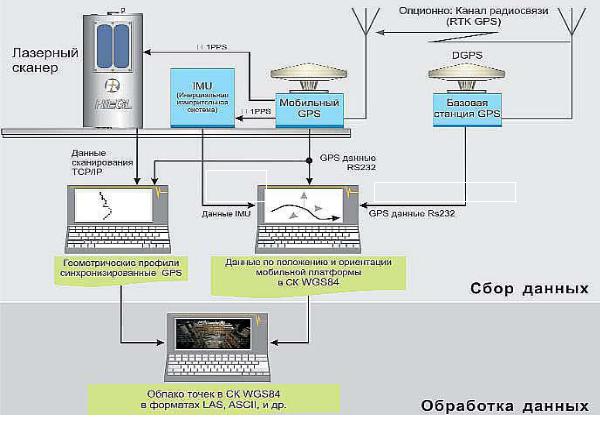
Принципиальную схему согласования данных инерциальной и спутниковой навигационной систем и процесс исключения влияния дрейфа гироскопов и акселерометров блока IMU можно показать на примере коррекции траектории, спроектированной на координатную плоскость OXZ (рис.12. 2):
в точках A, B, C, D, E и F, где выполнены спутниковые и инерциальные измерения, реальная траектория (3) совпадает с траекториями, вычисленными по данным инерциальных (1) и спутниковых (2),
148
что обусловлено «сбросом» влияния накопленного к этому моменту дрейфа акселерометров и гироскопов;
Z |
|
|
|
F |
|
|
|
|
|
|
B′ |
|
D′ |
F′ |
|
|
C |
E |
|
A |
B |
D |
|
|
|
C′ |
E′ |
X |
|
|
|
|||
|
|
|
||
O |
|
|
|
|
(1) |
Рис.12. 2. Принципиальная схема интеграции данных GPS и IMU: |
|||
– точки UMI-измерений и восстановленная по ним траектория; |
||||
(2) |
– точки GPS-измерений и восстановленная по ним траектория; |
|||
(3)– реальная траектория;
(4) – траектория по результатам интеграции данных GPS и IMU
– траектория по результатам интеграции данных GPS и IMU
по мере удаления от точек спутниковых измерений точки проекции траектории, найденной по данным инерциальных измерений, все более удаляются от реальной (3), и в итоге по данным IMU будут получены фрагменты траектории AB′, BC′, CD′ DF′ (1);
в процессе послеполетной обработки (постобработки) данных инерциальных и спутниковых измерений:
1)точки B′, C′, D′, F′ фрагментов (1) совмещаются с точками спутниковых измерений B, C, D, F;
2)фрагменты (1) траектории AB′, BC′, CD′ и DF′ разворачиваются вокруг начальных точек A, B, C, D, в результате чего преобразуются во фрагменты траектории AB, BC, CD и DF (4) соответственно, и оказываются в непосредственной близости от фактической траектории.
Разумеется, приведенная интерпретация несколько условна, но она отражает принцип согласования результатов инерциальных и спутниковых данных, дает ключ к пониманию причин относительно невысокой их точности в реальном режиме и объясняет необходимость постобработки.
Данные лазерного сканирования, полученные с помощью МСС, представляют собой «облака точек» с определенным количеством одиночных лазерных измерений. Каждое одиночное лазерное измерение имеет собственную временную метку в формате UTC или GPSвремени. Для синхронизации данных сканирования используются данные спутникового приемника GPS, а для коррекции мгновенных изменений положения мобильной платформы данные инерциальной системы.
149

Очевидно, что технология, в плане конструктивных решений, имеет много общего с методом воздушного лазерного сканирования (рис.12.3). С чисто математической точки зрения в СМК используется абсолютно аналогичный принцип измерения, что и в других приборах, относящихся к категории «лазерные сканеры» или другое название «лазерные локаторы» или «лидары». Обратимся к рис. 12.3.
NP, EP, AP
Рис. 12.3. Системы координат объекта ONEA и сканерного блока OXYZ
Векторные пространства, образованные системой координат СК ONEA и сканерного блока СК OXYZ, обозначим соответственно через G и S. Положение любой точки в указанных пространствах будем характеризовать векторами g и s.
Переход из одной трёхмерной СК в другую осуществляется на основе матрицы третьего порядка АGS и вектора, определяющего начало одной СК в другой СК. Матрица АGS может быть определена через величины направляющих косинусов, т. е. через разложение орт СК сканера OXYZ по базису обобщённой СК ONEA, определяемые по известным формулам аналитической геометрии по трём углам ориентирования.
|
NX |
NY |
NZ |
|
|
|
AGS |
|
|
EY |
|
|
( 12.1) |
EX |
EZ |
|||||
|
|
AX |
AY |
|
|
|
|
|
AZ |
|
|||
На основании уравнения (12.2) выполняется расчет всех координат лазерных точек
150