

2438
.pdfНа каждом из этапов выделяется две ветви вычислений, одна из которых связана с уточнением состояния системы, а вторая – с уточнением ковариационной матрицы. В обоих случаях используются данные только текущего и предыдущего циклов, что исключает необходимость хранения всего массива накопленных данных.
Обработанные в текущем цикле измерения используются для уточнения начальных условий, для чего вычисляются веса поправок к ним на основе ковариационных матриц оценки состояния и измерений. Причем, для уточнения ковариационной матрицы не требуется ни конкретных значений оценок состояния системы, ни измерений, а
x0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xk |
xk Fk 1xk 1 |
|
xk xk 1 K k zk H k xk 1 |
|||||||||||||
|
Rk |
|
|
|
|
|
K k Pk H kT H K Pk H kT Rk 1 |
|
|
zk |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
P F |
|
1 |
P |
|
1 |
F T |
1 |
Q |
|
1 |
P (I K |
k |
H |
k |
)P |
k |
k |
k |
|
k |
|
k |
k |
|
k 1 |
||||||
Pk
P0
Рис. 10.17. Логическая схема работы фильтра Калмана [51]
лишь только величины, характеризующие их погрешности (рис. 10.18). Следствием этого является уменьшение неопределенности элементов вектора оценки состояния системы xk, являющихся выходными данными фильтра Калмана на каждом цикле, после чего осуществляется подготовка к поступлению нового вектора измерений. При уточнении ковариационной матрицы ошибок Pk вектора оценки состояния xk учитывается возможность искажения модели поведения системы некоторым случайным процессом. Статистические парамет-
ры этого процесса задаются элементами матрицы возмущений Qk. Поскольку в процессе вычислений изменяется степень неопре-
деленности оценки состояния системы и элементы ковариационной матрицы ошибок, то фильтр Калмана можно рассматривать как алгоритм с переменными весами. При неизменном состоянии системы алгоритм фильтра Калмана даст те же результаты, что и классический
101
метод наименьших квадратов, в котором в качестве весовой используется матрица, обратная ковариационной.
Таким образом, фильтр Калмана является инструментом, позволяющим построить оптимальные оценки системных переменных на основе математической модели системы и по результатам выполненных измерений. Его важнейшими достоинствами является рекуррентная природа, проявляющаяся при работе в реальном времени, и возможность априорной оценки точности получаемых результатов средствами самого алгоритма.
Алгоритм фильтра Калмана сегодня является основным средством обработки измерений в навигационных системах, использующих спутниковый метод определений. При этом, располагая ха-
рактеристиками погрешностей обоих систем, фильтр Калмана сводит к минимумуих влияниена выходные навигационные данные [53].
10.4.3. Элементы модели интеграции ИНС и СНС
Математическая модель интеграции инерциальных и спутниковых измерений достаточно сложна, а ее основные положения сводятся к следующему.
Выставка блока инерциальных измерений (IMU), заключающаяся
вустановке его в положение, при котором его координатные оси будут либо параллельны координатным осям «целевой» системы – транспортного средства (самолета, автомобиля, водного судна и др.) или аэрокамеры, либо совмещены с ними. Рассматриваемая операция выполняется
внесколько этапов, включающих грубую выставку приборов и ее уточнение. При этом содержание операций определяется требуемой точностью и, следовательно, областью использования данных.
Грубая выставка блока инерциальных измерений зачастую сводится к жесткому креплению его на соответствующей площадке носителя с помощью болтов. Точность такой выставки невысока, и погрешности угловой ориентации могут достигать градуса. Тем не менее, во многих случаях этого достаточно для определения положения движущегося объекта (например, в автомобильном транспорте), тем более, что параметры выставки все равно будут уточнены при инициализации системы.
Порядок грубой выставки определяется инструкцией по эксплуатации блока в рамках соответствующей технологии.
Уточнение параметров выставки («точная выставка») иногда совмещается с инициализацией системы и выполняется непосредст-
102

венно перед началом измерений с целью определения начальных установок и настройки оборудования. Решение этих задач зачастую требует выполнения определенных действий, регламентируемых руководством по эксплуатации системы и связанных с перемещением носителя (самолета или автомобиля) по определенной траектории. Автоматическая обработка полученных при этом инерциальных и спутниковых данных позволяет определить начальные значения параметров полета и иные необходимые данные.
Так, руководство по эксплуатации съемочной системы ADS40 рекомендует выполнять уточнение выставки измерительных блоков и их регулировку за 5 – 6 минут до начала и после завершения съемки участка. С этой целью выполняется два последовательных разворота на 180 с углом крена не более 25 с последующим выходом на первый аэрофотосъемочный маршрут (рис. 10.18).
Точность определения параметров выставки при такой регулировке вполне достаточна для целей навигации, однако не всегда соот-
Рис. 10.18. Траектории полета для регулировки измерительного блока INS
ветствует точности фотограмметрической обработки материалов аэрофотосъемки. Поэтому параметры выставки могут быть уточнены при совместной обработке результатов фотограмметрических, инерциальных и спутниковых измерений с использованием метода самокалибровки.
Обработка инерциальных и спутниковых измерений выполняется с целью получения координат точек, в которых выполнены инерциальные измерения, и углов наклона платформы с помощью специальных программ и при минимальном вмешательстве оператора. При этом:
измеренные акселерометрами кажущиеся ускорения wX, wY, wZ по найденным с помощью гироскопов углам трансформируются на оси установленной при выставке системы координат и используются для интегрирования выражения (10.2) и вычисления скорости движения и текущих координат по формулам (10.1);
синхронизация инерциальных и спутниковых измерений выполняется по временным меткам, причем спутниковые данные обновляются с частотой 2 20 Гц, а инерциальные – с частотой от 200 до 500 Гц, т.е. значительно чаще;
103
координаты точек регистрации инерциальных и спутниковых измерений представляются в геодезических эллипсоидальных координатах – широте, долготе и высоте;
учет суточного вращения Земли выполняется путем введения в
вычисленные долготы поправок L = 7,292115 10-5 t, где t – продолжительность измерений в секундах от начала работ;
текущий угол крена основания, на котором установлен блок инерциальных измерений (в фотограмметрии – поперечный угол наклона снимка ), приводится к плоскости истинного меридиана, угол тангажа (продольного наклона снимка ) – к плоскости, перпендикулярной к истинному меридиану; угол рысканья (разворота ) отсчитывается относительно следа плоскости,
содержащей угол [4].
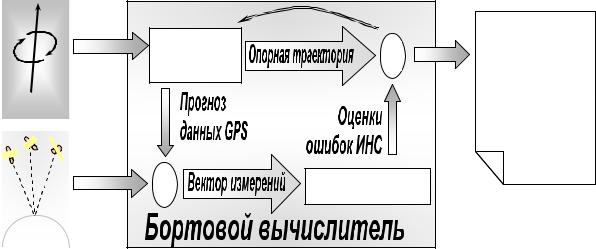
Согласование результатов инерциальных и спутниковых изме-
рений выполняется в бортовом вычислителе (рис. 10.19), функции которого сводятся к следующему [53]:
блок IMU (инерциальных измерений) выполняет измерение па-
раметров ориентации и проекций вектора кажущегося ускорения на координатные оси инерциальной системы, после чего направляет их на вход блока «Алгоритм навигации»;
|
Алгоритм |
2 |
Координаты, |
|
навигации |
углы наклона, |
|
|
|
+ |
скорость, |
БлокIMU |
|
ускорение, |
|
|
|
− |
время, … |
|
|
|
|
|
+ |
|
|
|
1 |
Фильтр Калмана |
|
БлокGPS |
− |
|
|
|
Рис.10.19. Структурная схема комплекса GPS/IMU |
||
блок GPS (спутниковых измерений) осуществляет прием сигна-
лов спутников, выполняет первичную обработку данных и направляет полученные результаты на вход блока 1;
«алгоритм навигации» осуществляет:
104

1)первичную обработку поступающих с частотой 200 – 500 Гц измеренных кажущихся ускорений и иные необходимые вычисления;
2)формирование опорной траектории полета по данным инерциальных измерений и передачу ее на вход блока 2;
3)прогноз данных спутниковых измерений с использованием эфемирид наблюдаемых спутников и передачу их на вход блока1;
4)блок 1 при поступлении в него результатов спутниковых измерений с частотой 2 – 20 Гц формирует разности между фактическими и прогнозируемыми данными и передает на вход фильтра Калмана как элементы вектора измерений, содержащие погрешности;
5)фильтр Калмана на основе полученного из блока 1 вектора измерений определяет оптимальную оценку состояния системы, передает ее и ковариационную матрицу ошибок состояния на вход блока 2;
6)блок 2 по полученным данным формирует:
оптимальную оценку состояния навигационной системы (координаты, углы наклона и др.) и передает ее как выходной сигналдля последующегоиспользования;
передает в алгоритм навигации сигнал, по которому
выполняется «сброс»начальных установок приборов. Таким образом, алгоритм последовательно обрабатывает вновь
поступающие векторы измерений с учетом значений, вычисленных в предшествующем цикле, и передает полученные данные для накопления и последующей обработки.
В процессе постобработки полученных данных накопленная информация обрабатывается в обратном порядке, что позволяет уточ-
Z
F
B′ |
D′ |
E 
 F′
F′
B
A
C D
C′ |
E′ |
X |
|
O
Рис. 10.20. Принципиальная схема интеграции данных GPS и IMU
(1) – точки UMI-измерений и восстановленная по ним траектория;
– точки UMI-измерений и восстановленная по ним траектория;
(2) – точки GPS-измерений и восстановленная по ним траектория;
– точки GPS-измерений и восстановленная по ним траектория;
(3) – реальная траектория;
– реальная траектория;
(4) – траектория по результатам интеграции данных GPS и IMU.
– траектория по результатам интеграции данных GPS и IMU.
105
нить все оценки состояния системы на любой момент времени и тем самым существенно повысить их точность.
Принципиальную схему согласования данных инерциальной и спутниковой навигационной систем и процесс исключения влияния дрейфа гироскопов и акселерометров блока IMU можно показать на примере коррекции траектории, спроектированной на координатную плоскость OXZ (рис. 10.20):
в точках A, B, C, D, E и F, где выполнены спутниковые и инерциальные измерения, реальная траектория (3) совпадает с траекториями, вычисленными по данным инерциальных (1) и спутниковых (2), что обусловлено «сбросом» влияния накопленного к этому моменту дрейфа акселерометров и гироскопов;
по мере удаления от точек спутниковых измерений точки проекции траектории, найденной по данным инерциальных измерений, все более удаляются от реальной (3), и в итоге по данным IMU будут получены фрагменты траектории AB′, BC′, CD′ DF′ (1);
в процессе послеполетной обработки (постобработки) данных инерциальных и спутниковых измерений:
1)точки B′, C′, D′, F′ фрагментов (1) совмещаются с точками спутниковых измерений B, C, D, F;
2)фрагменты (1) траектории AB′, BC′, CD′ и DF′ разворачиваются вокруг начальных точек A, B, C, D, в результате чего преобразуются во фрагменты траектории AB, BC, CD и DF (4) соответственно, и оказываются в непосредствен-
ной близости от фактической.
Разумеется, приведенная интерпретация несколько условна, но она отражает принцип согласования результатов инерциальных и спутниковых данных, дает ключ к пониманию причин относительно невысокой их точности в реальном режиме и объясняет необходимость постобработки.
10.5. Опыт эксплуатации интегрированных навигационных систем при изысканиях
В последние годы усилился интерес производственных предприятий и организаций к интеграции инерциальных и спутниковых методов навигации для специальных работ, в частности, для определения:
106
параметров железнодорожного полотна (в т.ч. его деформации);
местоположения подвижного состава железнодорожного транспорта, автомобилей и других движущихся объектов;
координат геодезических пунктов различного назначения и съемки в закрытой местности, в населенных пунктах с многоэтажной застройкой и в иных ситуациях, когда по каким-либо причинам возможности спутниковых измерений ограничены.
Внастоящее время высокоточное решение перечисленных задач
на основе интеграции инерциальных и спутниковых систем, обеспечивается применением технологии SPANTM (Synchronized Position, Attitude and Navigation – синхронизированное позиционирование, пространственная ориентация и навигация), разработанной компанией NovAtel Inc. (Канада). Эта система обеспечивает позиционирование с обработкой данных как в реальном времени (т.е. с помощью процессора приемника), так и постобработки (т.е. в специализированном программном обеспечении). При определенных обстоятельствах эта система может применяться и при выполнении аэросъемки. Ее составляющими являются [47]:
двухили трехчастотные ГЛОНАСС/GPS приемники DL-4plus или ProPak-V3 компании NovAtel с радиоканалом УКВ или GSM для передачи дифференциальных поправок в реальном времени;
двухили трехчастотные антенны компании NovAtel GPS-702- GG (для высокоточных работ и совместной работы ГЛОНАСС/GPS) или GPS-702L, GPS-702-GGL, ANT-534 (для дифференциального сервиса OmniStar);
блок инерциальных измерений одной из рассмотренных выше конструкций, с помощью которого выполняются инерциальные измерения с частотой 100 Гц;
пакет программ для комплексной постобработки спутниковых и инерциальных измерений.
Алгоритм вычислительной обработки позволяет включить в об-
работку как инерциальные, так и первичные спутниковые измерения (псевдодальности, псевдофазы и доплеровские сдвиги частоты), что позволяет получать надежные решения даже при недостаточном числе наблюдаемых спутников. Кроме того, допустимо использование режимов абсолютных, относительных и дифференциальных спутниковых измерений и их комбинации, что позволяет сократить время
107
захвата и перезахвата сигналов от спутников, а также существенно снизить время инициализации при RTK режиме.
О разработке технологии SPAN было объявлено сравнительно недавно (в августе 2004 г.), а публикации о ней можно найти на сайтах компании NovAtel и связанных с ней российских компаний
GPScom и GNSSplus.
Экспериментальная проверка точности позиционирования с использованием технологии SPAN была выполнена путем проложения трассы с включением в нее пунктов, расположенных на застроенных территориях с многоэтажной застройкой, в залесенной местности, под мостами и эстакадами. Причем, в ряде случаев участки трассы с полным отсутствием радиовидимости оказывались довольно протяженными.
Средние квадратические погрешности определения планового положения этих пунктов оказались равными [47]:
при автономных (абсолютных) измерениях более 1,5 м;
при дифференциальных измерениях с помощью систем: o SBAS (WAAS/EGNOS) – менее 0,90 м,
o DGPS (по коду) – 0,45 м,
o OmniSTAR (HP+) – 10-15cм;
при относительных измерениях в режиме RT-2 – 10мм 1 мм/км;
при постобработке – 5мм 1мм/км.
При этом погрешности определения скорости, ускорения и вре-
мени оказались равными 0,02 м/с, 0,03 м/с2 и 20 нс соответственно. Как следует из приведенных данных, использование интегриро-
ванной технологии инерциальных и спутниковых измерений SPAN обеспечивает достаточно высокую точность получения координат определяемых точек вне зависимости от условий видимости на них.
Проявляющийся повышенный интерес к средствам и методам интеграции инерциальных и спутниковых измерений со стороны геодезистов и топографов дает уверенность, что они займут достойное место в ряду современных технологий производства топографогеодезических и изыскательских работ.
В 2005 – 2007 гг. компанией NovAtel был разработан метод точного позиционирования PPP (Precise Point Positioning), обеспечивающий возможность позиционирования с точностью 10 – 30 см в режиме кинематики и 1,5 – 2,0 см в режиме статики без использования базовых станций [50]. Решения базируются на использовании двухчастотных GPS-приемников и точных эфемерид наблюдаемых
108
спутников, содержащихся в файлах Rapid и Final и доступных спустя 17 и 12 часов соответственно через сеть Международной службы навигационных сообщений IGS. Оба решения, реализованные в программах GrafNav компании NovAtel версий 7.70 – 8.10, используют алгоритмы многопроходного (multi-pass) сглаживания при помощи фильтра Калмана и широко применяются при выполнении изыскательских и аэрофотогеодезических работ в Канаде, США, России и в ряде других стран.
Контрольные вопросы
1.Перечислите системы координат, используемых для навигационных задач.
2.Какой принцип навигации возможно применять при работах под землёй и под водой?
3.На каких положениях базируется инерциальная навигация?
4.Что определяет прибор акселерометр?
5.Что определяет прибор гироскоп?
6.Что входит в состав инерциального измерительного блока?
7.Какая задача навигационной системы при управлении полётом летательного аппарата?
8.В чём особенности навигации автомобильного транспорта?
9.Какие две глобальные навигационных системы Вы знаете?
10.Что означает термин «позиционирование»?
11.Почему система спутниковой навигации и позиционирования является глобальной?
12.Из каких трёх основных сегментов состоит спутниковая навигационная система?
13.В чём заключаются особенности построения функционирования современного космического сектора?
14.Сколько спутников входит в космический сегмент систем ГЛОНАСС и GPS и каково их распределение вокруг Земли?
15.Какие функции осуществляет сегмент управления и контроля систем ГЛОНАСС и GPS?
16.Что представляют собой эфемериды спутников.
17.На каких стадиях используются: прогноз эфемерид и их окончательные значения?
18.Перечислите конечные результаты, которые получает потребитель от систем ГЛОНАСС и GPS.
109
19.Что является технологической основой сектора потребителя?
20.Сколько спутников минимально необходимо наблюдать для определения пространственных координат потребителя?
21.Понятие о дифференциальной подсистеме (сети базовых станций).
22.Какая информация посылается потребителю для определения координат спутников на момент наблюдения?
23.Какому уровню точности соответствуют потенциальные возможности фазовых методов измерений несущей частоты?
24.Перечислите источники погрешностей, которые влияют на точность определения координат.
25.В чём заключается сущность дифференциальных методов, базирующихся на определении разности, а не на абсолютных значениях координат?
26.Каковы принципы разрешения неоднозначности при фазовых измерениях?
27.Какие две основные стадии обработки измерений при геодезических спутниковых определениях?
28.Перечислите режимы работ спутниковых геодезических приёмников.
29.Чем отличаются лучевой и сетевой методы определений?
30.Как используется навигация при реализации проекта аэрофотосъёмки?
31.Какими методами и с какой точность определяются координаты центров фотографирования при аэрофотосъёмке?
32.Как осуществляется переход от координат фазового центра антенны спутникового приёмника к координатам центра проекции фотокамеры?
110