

2438
.pdf
|
В системе может ис- |
|
|||||
|
пользоваться |
до |
6 |
лазерных |
|
||
|
сканеров. |
В |
конфигурации |
|
|||
|
Topcon IP-S2 HD (рис. 12.15) |
|
|||||
|
используется |
лазерный ска- |
|
||||
|
нер Velodyne HDL-64E. Ска- |
|
|||||
|
нер |
выполняет |
|
до 1,333 |
|
||
Рис. 12.14. Система |
|
|
|||||
млн. измерений |
в |
секунду, |
|
||||
Topcon IP-S2 с |
|
||||||
тремя сканерами |
имеющих |
метку |
времени и |
Рис. 12.15. |
|||
|
геопривязку. |
В |
универсаль- |
Topcon IP-S2 |
|||
ной конфигурации |
HD со скане- |
||||||
Topcon |
IP-S2 |
(рис.12.14) ис- |
ром Velodyne |
||||
пользуются 3 лазерных сканера два сканера с об- |
HDL-64E. |
||||||
|
|||||||
зором 180° для сканирования ситуации справа и слева от машины, и еще один сканер с обзором 90°, ориентированный по оси движения транспортного средства. Сканеры выполняют до 40000 измерений в секунду, имеющих метку времени и геопривязку.
Рис. 12.16. Датчик
колеса (одометр)
Датчик колеса (одометр)
Датчик закрепляется непосредственно на колесе автомобиля и используется для определения скорости и пройденного пути. Аналогичная информация может быть получена системой
Topcon IP-S2 или Topcon IP-S2 HD также и из
CAN-шины автомобиля.
161

Блок управления
Специальный блок, имеющий разъемы для подключения описанных ранее устройств и связи с компьютером. Блок управления получает данные от всех подключенных сенсоров и, используя опорный генератор, присваивает им метки точного времени. В дальнейшем данные с
метками времени поступают в общую базу
Рис.12.17. Блок управления данных.
Программное обеспечение
Блок управления содержит встроенное программное обеспечение, предназначенное для проверки подключенных к системе сенсоров, их настройки, задания файлов работ и сохранения данных (VehicleDahboard.jpg). Для обработки полученных данных используется программное обеспечение Geoclean, в котором объединяются данные, полученные от GNSS приемника, блока инерциальных измерений, датчика колеса и фотокамеры. На основе полученных данных вычисляются точные координаты автомобиля на каждый момент движения. После произведенных вычислений пользователю становятся доступны такие функции, как просмотр траекторий движения автомобиля, выполнение измерений по облакам точек и фотографиям, выделение элементов из облаков точек и фотографий, получение из облака точек точных координат различных элементов. В дальнейшем полученные данные могут быть экспортированы в файлы обменных форматов ASCII, LAS, BIN.
12.3. Процесс съемки и получаемый результат
Для выполнения измерений в районе работ должна быть установлена базовая станция GNSS, данные с которой используются для вычисления координат автомобиля с заданным интервалом. Позиционирование может осуществляться в режиме постобработки данных. После настройки и тестирования всех сенсоров системы находятся в готовности к работе.
162

При начале движения автомобиля сканеры и фотокамера начинают свою работу, в результате чего на экране компьютера мы видим получаемые от них данные. Это очень наглядно, оператор сразу имеет возможность оценить степень достаточности получаемых данных и наличие мертвых зон в тех или иных местах (рис. 12.18 справа). На случай остановки система может прекратить сбор данных и возобновить его при продолжении движения. Навигацию осуществляет води-
Рис. 12.18. Навигация по маршруту проекта\оценка степени достаточности получаемых данных
тель по запроектированному маршруту, где в качестве основы может использоваться растровое изображение из Google Earth территории объекта сканирования (рис. 12.18 слева).
Результатом работы Topcon IP-S2 и Topcon IP-S2 HD являются полученные в результате сканирования облака точек, в которых каждая точка имеет метку времени и трехмерные координаты (рис.
12.19), а также цветные панорамные фотографии, привязанные по времени и координатам.
Применение в дорожном хозяйстве. В этом случае системы позволяют подготовить данные для
анализа состояния дорожной одежды и профиля автодороги, состояния бровки дороги, определения радиуса кривизны и виражей на весьма протяженных участках. При этом мы получаем не отдельные характерные точки дороги, как происходит при съемке с помощью электронных тахеометров и GNSS-приемников, а огромный массив информации, детальнейшим образом описывающий всю дорогу до последней кочки.
Управление территориями. Системы также находят свое применение в управляющих организациях для целей инвентаризации.
163
Сюда можно отнести и инвентаризацию объектов инфраструктуры – дорожные знаки, наземные коммуникации, выходы подземных коммуникаций, искусственные неровности и т.д., и инвентаризацию зеленых насаждений в городской черте. В последнее время становится актуальной тематика создания 3D-моделей существующих городов для более эффективного управления территориями. Для таких приложений оперативность работы Topcon IP-S2 и Topcon IP-S2 HD просто трудно переоценить.
Цифровая картография, сбор данных для ГИС систем. Одна из наиболее часто встречающихся областей применения - это сканирование с целью мобильного картографирования больших участков территорий либо уточнение уже существующих картографических материалов. Если на съемку большого участка застроенной территории могут уйти дни, недели, система справится с такой задачей за считанные часы. При этом качество полученных данных не будет уступать традиционным методам съемки.
12.4. Испытание системы StreetMapper
Система StreetMapper, являющаяся результатом совместной работы английской компании 3D Laser Mapping и немецкой фирмы IGI mbH, специализирующейся в области навигации, представляет собой первый образец системы, предназначенной для быстрой и точной мобильной трехмерной лазерной съемки.
Компании 3D Laser Mapping было предложено провести испытание системы StreetMapper в ходе работ по обследованию трехкилометрового участка шоссе из двух проезжих частей в ближайшем пригороде Копенгагена.
Результаты этого обследования контролировались при помощи сравнения с координатами контрольных точек, съемка которых выполнялась дорожным управлением. Данный отчет посвящен точности съемки, достигнутой с помощью мобильной системы.
Каждая из проезжих частей обследовалась системой StreetMapper на скорости 45 км/ч. Сканеры были настроены так, что первый был ориентирован вниз на 20° от горизонта, второй вверх на 20° от горизонта, и два боковых под углом 45° к линии движения. Такая расстановка позволила достичь при съемке плотности в 200 точёк/м2 для всего маршрута. Число спутников в начале съёмки было 8, а к концу возросло до 10 (рис.12.20).
164
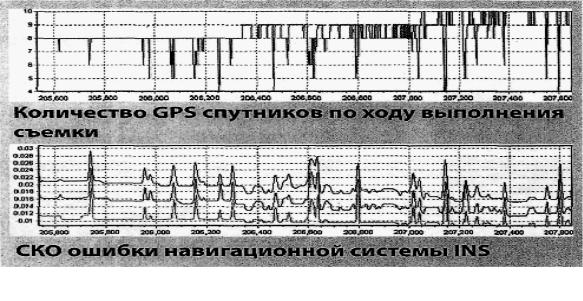
Разница между положением траектории в прямом и обратном расчетах пакета TERRAOffice составила по высоте 20 мм. Погрешности по северному и по восточному направлениям соответственно
|
|
10 |
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,03 |
|
|
|
|
|
|
|
|
||
|
0,02 |
|
|
|
|
|
|
|
|
|
|
0.01 |
|
|
|
|
|
|
|
|
|
|
|
205,800 |
206,200 |
206,600 |
207,000 |
207,400 |
|
|||
|
|
|
|
|||||||
|
|
|
Рис.12.20. Количество спутников и СКО по исследуемому маршруту |
|||||||
составили 15 и 10 мм. |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Таблица 12.4 |
|
|
|
|
|
Сравнение результатов съёмки с контрольными измерениями |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Измерения в отдельных пунктах |
Метод |
|
Тахеометрическая |
|||||
|
|
GPS-статика |
|
|
съёмка |
|||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Число точек |
|
40 |
|
|
1020 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
Среднее отклонение по высоте |
0,75 |
|
|
-1,3 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Максимальное отклонение по |
20 |
|
|
75 |
|
|||||
высоте |
|
|
|
|
||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Минимальное отклонение по |
-20 |
|
|
-60 |
|
|||||
высоте |
|
|
|
|
||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Среднеквадратическое отклонение |
10 |
|
|
12,4 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Стандартное отклонение |
|
9,97 |
|
|
12,3 |
|
||||
Маркированные контрольные точки были расставлены вдоль обочины через каждые 200 м. Их координаты были обследованы с помощью GPS приемника при измерениях в режиме статики. Полученные данные были уровнены по методу свободной сети и затем приведены к точному высотному уровню. Точность позиционирования каждой точки составила 5 мм в плане и 10 мм по высоте. Высотные значения, полученные по результатам лазерного сканирования, сравнивались со значениями (табл. 12.4), полученными путем измере-
165
ний GPS приемником в статике, а также полученные тахеометром. Установлено, данные системы StreetMapper имеют стандартное отклонение в 10 мм от результатов измерений GPS приемником в режиме статика и 12,3 мм от измерений, выполненных тахеометром.
Контрольные вопросы
1.Какие особенности у наземного мобильного лазерного сканировании (НМЛС) по сравнению с ВЛС?
2.Почему невозможен сбор пространственной информации без интегрированной системы прямого геопозиционирования?
3.Перечислите необходимые компоненты системы НМЛС.
4.Какие достоинства и недостатки у инерциальной и спутниковой систем навигации?
5.Сколько спутниковых приёмников необходимо иметь на транспортном средстве для целей навигации?
6.В чём принципиально заключается согласование спутниковых и инерциальных измерений?
7.Какие исходные данные необходимы для расчёта координат лазерных точек?
8.Какие лазерные локаторы более безопасны для человека ВЛС или НМЛС?
9.Какова максимально достигнутая плотность лазерных точек при НМЛС?
10.Назовите отличие состава НМЛС от ВЛС.
11.Перечислите наиболее предпочтительные области применения НМЛС.
12.Назовите современные системы мобильного картографирования, устанавливаемые на автомобилях.
13.Для каких целей используется датчик колеса (одометр) в НМЛС?
14.Назовите характеристики достигнутой точности современными системами НМЛС.
166
Глава 13. ГЕОИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ ТЕРРИТОРИИ ГОРОДА
Технологическое отставание России от передовых стран в области современного использования геопространственной информации является одним из серьёзных препятствий для динамичного развития страны, что заставляет искать пути и способы выхода из данного кризиса. На проблему плохой обеспеченности городов картографической и градостроительной документацией начинают обращать внимание. Так в новой редакции Градостроительного кодекса появились статьи, не допускающие финансирование градостроительной деятельности на территориях, не обеспеченных актуальными генеральными планами. В связи с этим во многих субъектах Российской Федерации приняты собственные программы, предусматривающие обновление картографической основы и градостроительной документации.
Одной из первоочередных задач ХХI века в России является современное геоинформационное обеспечение территорий городов, которое включает создание единого координатно-временного пространства и современной цифровой картографической основы.
Динамичное развитие территории остро нуждается во всё более точных картографических продуктах. Возникает парадоксальная ситуация, когда стоимость создания таких материалов растёт по мере повышения точности, а время, в течение которого их можно считать достоверными, катастрофически сокращается. Современные достижения в области дистанционного зондирования, спутниковых навигационных технологий и оперативной цифровой обработки геопространственной информации позволяют выйти из тупика классических технологий.
Точная, актуальная, широкого спектра информация о местности, оперативно предоставленная потребителю в цифровой форме, позволяет на качественно новом уровне обоснованно использовать её в системах регионального и государственного управления, а также эффективно вести бизнес.
Комплекс аэрофотогеодезических и картографических работ для современного геоинформационного обеспечения территории города включает следующее:
1. Создание единого поля координатно-временной информа-
ции на территории города и его окрестностей с целью согласованной увязки и решения различных задач необходимого комплекса работ.
167
2.Аэрофотосъемка и лазерное сканирование городской территории со спутниковой навигацией и определением элементов внешнего ориентирования для создания современного цифрового картографического материала в средних и крупных масштабах, а также для целей реального 3D моделирования объектов городской инфраструктуры.
3.Создание цифрового планово-картографического мате-
риала необходимой точности и его мониторинг поддержание его на уровне современности, создание ГИС для систем управления. В перспективе создания 3D функционирующей городской информационной системы.
13.1. Создание единого поля координатно-временной информации
Для обеспечения взаимоувязанных определений местоположения различных объектов, как для автоматизированной системы информационного обеспечения, так и при выполнении строительных, планировочных, геодезических, топографических, кадастровых, землеустроительных, маркшейдерских и управленческих работ, а также высокоточной навигации и диспетчеризации необходимо создать единое поле координатно-временной информации.
С этой целью на городской территории создаётся сеть, как правило, постоянно действующих референцных спутниковых GPS/ГЛОНАСС-станций с таким расчетом, чтобы точность спутниковых определений местоположения на любом локальном участке обеспечивала необходимую геодезическую точность определения координат. Кроме того, обеспечивала для любой части городской территории съёмку наиболее крупного масштаба 1:500 в режиме RTK и удовлетворяла требованиям комплексного решения жизненно необходимых задач территории. Целевое назначение системы референцных станций кратко перечислим:
создание единого поля координатно-временной информации;
установление границ административно-территориальных образований;
геодезическое обеспечение строительства в реальном масштабе времени;
решение задач высокоточной навигации и диспетчеризации наземных, речных и воздушных транспортных средств;
168
координатно-временное обеспечение поисково-спасательных работ служб МЧС, скорой помощи, ГИБДД и др.;
определение координат пунктов ГГС, центров фотографирования фотоснимков, опорных межевых сетей, поворотных точек границ участков;
геодезическое обеспечение управлением строительными машинами в реальном масштабе времени.
Современная геодезическая основа города создаётся по спутниковой технологии в местной системе координат, установленной строго относительно Государственной геодезической системы координат (ГСК-95), что регламентируется постановлениями Правительства Российской Федерации. Для создания такой сети и установления местной системы координат (МСК) необходимо выдержать следующие основополагающие условия:
местная система координат должна иметь непосредственные параметры (ключи) перехода к Государственной системе координат ГСК-95;
каркас современной геодезической основы города создаётся в виде сети базовых станций по GPS-технологии;
один или несколько исходных пунктов должны быть определены относительно не менее трёх близлежащих пунктов фундаментальной астрономо-геодезической сети (ФАГС), либо высокоточной геодезической сети (ВГС), либо постоянно действующих пунктов мировой геодезической сети;
главным условием является необходимость сохранения город-
ской системы координат, в которой ранее были выполнены крупномасштабные съёмки территории города, и одновременно с этим обеспечить высокую однородную точность городской геодезической сети для всего комплекса задач.
Геодезическая привязка сети базовых станций осуществляется в два этапа. На первом этапе выполняется привязка всех пунктов спутниковой геодезической сети к общеземной системе координат WGS84. На втором этапе определяются координаты базовых станций и нивелирных пунктов в ГСК-95 и Балтийской системе высот.
Например, в городе Омске создана сеть из пяти базовых станций (рис.13.1). Базовая станция «ВИСХАГИ» определена из пятисуточных сеансов наблюдений относительно пяти постоянно действующих пунктов мировой геодезической сети с использованием точных эфемерид. В результате уравнивания сети получены координаты базовой
169
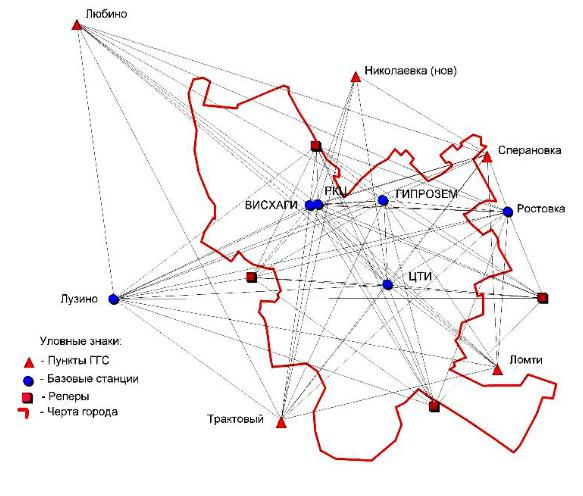
станции в WGS-84 с точностью 3 см в плане и 10 см по высоте. Определение координат остальных базовых станций в WGS-84 было выполнено уравниванием от базовой станции «ВИСХАГИ».
После привязки спутниковой геодезической сети к общеземной системе координат определяются координаты в государственной системе координат 1995 года. Для этого выполняются спутниковые измерения сетевым методом от пунктов государственной геодезической сети. На пунктах ГГС выполнялись синхронные спутниковые наблюдения четырьмя сеансами с изменением высот антенн между сеансами. Длительность одного сеанса спутниковых наблюдений составляет 4 часа.
На нивелирных пунктах выполняются синхронные спутниковые наблюдения двумя сеансами с изменением высот антенн между сеансами. Длительность одного сеанса спутниковых наблюдений также составляет 4 часа.
Весь комплекс полевых и камеральных геодезических работ по
Рис. 13.1. Схема сети базовых станций города
определению координат базовых станций в системе координат ГСК-
170