

2438
.pdfпод кронами деревьев, так и для оценки геометрических характеристик самих деревьев и объема древесной массы. Современные лазер- но-локационные методы предлагают ряд принципиально новых возможностей при обследовании лесных ландшафтов:
Зондирующий луч лазерного локатора обладает способностью проникать сквозь листву деревьев. В силу чего, лазернолокационные методы позволяют непосредственно измерять рельеф под кронами деревьев с абсолютной геодезической точностью до 15-ти см. Практика показывает, что густота лесного покрова может сказаться на объеме авиационных работ, необходимом для измерения рельефа того или иного района с требуемой степенью детальности. Но отнюдь не оказывает влияния на принципиальную возможность выполнения таких измерений.
Реализация режима работы лазерного локатора, при котором за каждый акт сканирования регистрируется группа отраженных импульсов, позволяет наряду с топологией земной поверхности получать данные, характеризующие растительность. Так, первый (по времени) отраженный импульс будет характеризовать высоту деревьев, а пространственное распределение откликов, приведенное к вертикальному направлению, может быть использовано для оценки интенсивности поглощения и, следовательно, для оценки плотности древесной массы.
Использование в составе современных лазерных локаторов универсальных навигационных комплексов, включающих аппаратуру спутниковой навигации GPS, GLONASS и инерциальные системы, позволяет естественным образом интегрировать лазерно-локационные данные с цифровой фотографической, мультиспектральной и тепловизионной съемкой при необходимой геодезической точности. Это также чрезвычайно важно при оценке фаз вегетации, определении наличия болезней растений, химического состава почвы, наличия загрязнений водоемов.
Анализ структуры полога древостоя, интегрированный с данными видео- и фотосъемки позволяет с высокой степенью достоверности определять различные типы и ярусы лесной растительности с разделением по породному составу, густоте и другим параметрам. Последующая обработка данных лазерного профилирования путем интегрирования, преобразования Фурье и анализа методом средней свободной компоненты позволяет
131

получить такую важную и точную информацию о растительности, как запас древостоя, тип леса, индекс листовой поверхности, напрямую или опосредованно – через значения диаметра крон, густоту, протяженность полога и высоту древостоя. Достаточно высокую точность при обработке лазерных профилей обеспечивают методы регрессионной оценки фитомассы древостоя.
11.5.Инструментальные средства лазерной локации
11.5.1.Методика определения координат лазерных точек при выполнении лазерно-локационной съемки
Как показано в предыдущих разделах первичное лазернолокационное измерение выполняется с привлечением нескольких источников информации. По этой причине для полного описания процесса измерения необходимо законченное формализованное представление всех соотношений, определяющих пространственную и временную соотнесенность данных различных источников.
Что касается временно й синхронизации, то она обеспечивается за счет привязки временных шкал всех приборов к единому абсолютному времени, поставляемому бортовым GPS приемником. В процессе съемки обеспечивается лишь регистрация всех видов данных с соответствующими временными метками. Фактическая синхронизация обеспечивается на этапе наземной обработки.
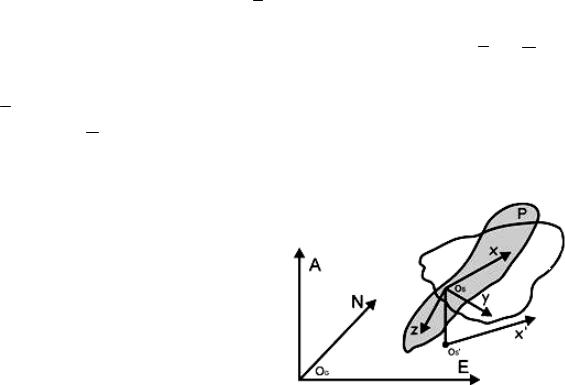
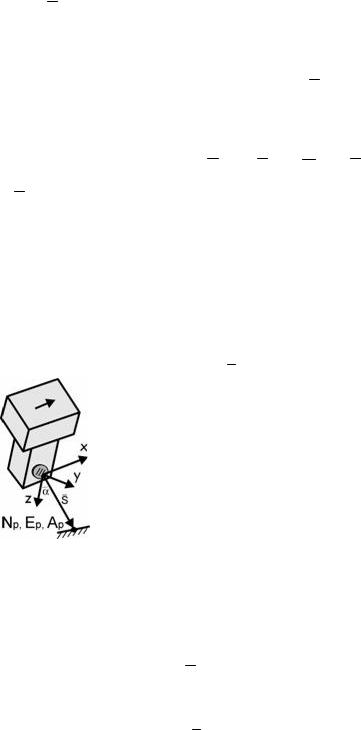
Перейдем к рассмотрению вопросов пространственной синхронизации. Общая схема компоновки бортового аэросъемочного комплекса изображена на рис. 11.6, где показаны все значимые компо-
Рис. 11.6. Общая схема компоновки бортового аэросъемочного комплекса
132

ненты комплекса, а именно сканерный блок, GPS антенна, а также цифровой аэрофотоаппарат. Общее положение комплекса рассматривается в некоторой обобщенной топоцентрической СК ОNEA, в которой предполагается, что ось ОN направлена на север, ось ОE на восток, а ось ОA дополняет эту СК до левой ортогональной. Так как функционирование комплекса основано на взаимодействии и обмене информацией между компонентами, необходимо установить формулы соответствия между СК, используемых для каждого из устройств.
Векторные пространства, образованные СК ОNEA, сканерного блока и фотоаппарата будем обозначать соответственно G, S, C. Строгие определения всех этих СК также представлены ниже.
Из определения ясно, что все системы координат являются ортогональными. Положение любой точки в указанных пространствах будем характеризовать векторами g, s, c. В приведенном обозначении вектор определяет принадлежность к тому или иному пространству.
Под уравнениями связи будем понимать соотношения, обеспечивающие пересчет координат произвольного вектора из одной СК в другую. Ясно, что эти соотношения пересчета будут зависеть от некоторого набора параметров, характеризующих:
Положение и ориентацию всего аэросъемочного комплекса
впространстве.
Внутренней конфигурации комплекса.
Только после того как уравнения связи записаны явно, появля-
ется возможность гарантировать пространственную синхронность потоков данных. Также на основе этих уравнений возможен анализ компоновки аэросъемочного комплекса на предмет его оптимизации. В этом смысл введения уравнений связи.
Ясно, что переход из одной трехмерной СК в другую осуществляется на основе матрицы третьего порядка и вектора, определяющего начало одной СК в другой СК. Будем обозначать матрицы перехо-
да через А , а начальные вектора через b , с добавлением индексов, определяющих пространства, для которых определяется переход. На-
пример, АGS и bGS для перехода из пространства G в пространство сканера S .
В силу того, что мы имеем дело с тремя СК, всего имеет место шесть уравнений связи. На практике, однако, достаточно определить только два из них, а именно:
133
S ® G |
|
||||||||||||||
|
|
|
|
GS + |
|
GS |
|
; |
(11.1) |
||||||
|
g |
b |
A |
s |
|||||||||||
C ® S |
|
||||||||||||||
|
= |
|
SC + |
|
SC |
|
. |
(11.2 ) |
|||||||
s |
b |
A |
c |
||||||||||||
Покажем, что все другие уравнения перехода могут быть получены из двух приведенных выше.
C ® G
g bGS + AGS s (bSC + ASC c ) = bGS + AGS bSC + AGS ASC c
Таким образом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(11.3) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
GC = |
|
|
GS + |
|
|
|
|
|
|
GS |
|
|
SC ; |
(11.4) |
|||||||||||||
|
|
|
b |
b |
|
|
A |
b |
||||||||||||||||||||||||||
|
|
|
|
GC = |
|
|
|
GS |
|
|
SC ; |
|
|
|
(11.5) |
|||||||||||||||||||
|
A |
A |
A |
|
|
|
||||||||||||||||||||||||||||
G ® S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
= |
|
|
GS1 |
|
|
GS + |
|
GS1 |
|
|
; |
(11.6) |
||||||||||||||||||
s |
A |
|
b |
A |
g |
|||||||||||||||||||||||||||||
|
|
b |
GS = |
A |
GS1 |
|
b |
GS ; |
|
|
|
(11.7) |
||||||||||||||||||||||
|
|
|
SG = |
|
GS1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(11.8) |
|||||||||||||
|
|
A |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Аналогично решается вопрос для уравнений перехода S ® C, G ® C .
При выводе уравнения связи для топоцентрического и сканерного пространств прежде всего изучим источники информации, определяющие положение сканерного блока в пространстве ОNEA:
Пространственные координаты сканерного блока определяются бортовым GPS приемником, который непосредственно поставляет координаты местоположения антенны. При этом следует отметить:
Фактическое определение геоцентрических координат антенны осуществляется дискретно с программируемой частотой, которая обычно составляет 1-20 Гц.
Точное определение координат антенны N A , E A , A A осуществляется только в процессе наземной постобработки, а не в реальном времени (если не используется режим RTK). В реальном времени определяются только условные, вспомогательные координаты, необходимые для правильной работы навигационного компьютера.
Угловая ориентация сканерного блока определяется с помощью IMU, входящего в состав навигационного компьютера.
134
Относительно выдаваемых им данных имеют место следующие замечания:
Определение угловой ориентации также осуществляется дискретно, обычно с частотой 50-200 Гц.
Выдаваемые значения IMU есть три угла ориентации R*, P*, H*, которые эквивалентны, как уже отмечалось, соответствующим углам ориентации носителя – крену, тангажу и рысканию. Эти значения, однако, не могут быть использованы непосредственно в искомом уравнении связи по следующей причине. Специфика работы навигационного компьютера и в частности IMU определяет его работу только в общемировой СК земного эл-
липсоида WGS-84, но не в ортогональной топоцентрической СК.
Исходя из описанных особенностей навигационного обеспечения процесса сканирования, перейдем к выводу уравнения связи. Главной целью здесь является переход к положению, когда в любой
момент времени однозначно определены вектор bGS , определяющий
текущее положение сканера и матрица ориентации AGS . Такой переход возможен исходя из следующих соображений:
за счет использования специальных математических приемов, изложенных ниже, можно говорить о наличии непрерывных во времени данных по траектории носителя и углам ориентации. Таким образом, можно считать, что каждое первичное лазернолокационное измерение обеспечено соответствующими данными;
за счет рассматриваемой в предыдующих разделах процедуры измерения выставочных параметров сканерного блока всегда
возможен переход от вектора bGA , который есть результат непо-
средственного GPS измерения, к вектору bGS , определяющего положение точки центра сканирования;
Корректный пересчет углов ориентации R*, P*, H* из СК Земного эллипсоида в углы R, P, H СК ОNEA всегда возможен с применением методик, изучаемых в курсе математической картографии.
С учетом вышеизложенного вернемся к уравнению связи (11.1):
g bGS + AGS s
135
Предполагается, что вектор s представляет результат единичного дальномерного измерения, т.е. значение наклонной дальности и
направление зондирующего луча. Наличие определенных bGS и AGS позволяет перейти к картографическим координатам точки отражения g , т.е. выполнить главную задачу сканирования.
Матрица AGS может быть определена через величины направляющих косинусов, т.е. через разложение орт СК сканера ОXYZ по базису обобщенной СК ОNEA .
|
|
NX |
NY |
NZ |
|
|
|
|
|
|
A |
GS = EX |
EY |
EZ . (11.9) |
|
|
|
AY |
|
|
|
AX |
AZ |
Представим схему интерпретации величин и знаков углов R, P, H так, как это принято в авиационном дистанционном зондировании (рис. 11.7).
w
Рис. 11. 7 К определению знаков углов R, P, H
Для формального определения углов введем несколько вспомогательных объектов:
Оs1 X1 – проекция вектора Оs X на горизонтальную плоскость ОNE.
P – вертикальная (параллельная ОA) плоскость, проходящая через ОsX.
W плоскость, совпадающая с ОsXY.
Теперь перейдем к определению углов:
Угол рыскания H есть угол между векторами и Оs1 X1 . Значение этого угла принято определять в диапазоне от 0 до 2π . Значение этого угла возрастает, если вектор Оs1 X1 вращается по направлению часовой стрелки при взгляде со стороны конца вектора ОA .
Угол тангажа P есть угол между вектором ОsX и его проекцией Оs1 X1. Предполагается, что этот угол находится в диапазоне
|
|
|
||||
|
|
, |
|
|
. Изменение P в более широком диапазоне лишено практи- |
|
2 |
2 |
|||||
|
|
|
||||
ческого смысла. Угол P считается положительным, если точка X ле-
136
жит выше плоскости ОcNE (имеет положительное значение координаты A) и отрицательным в противном случае.
Углом крена R будем называть угол, образованный плоскостями
|
|
|
||||
P и W. R изменяется в диапазоне |
|
, |
|
|
. Изменение R в более ши- |
|
2 |
2 |
|||||
|
|
|
||||
роком диапазоне также лишено практического смысла. Знак R определяется правилом буравчика: R считается положительным, если кратчайший поворот от P к W осуществляется в направлении вращения буравчика, расположенного вдоль оси ОsX .
С учетом введенных определений можно явно записать значения
коэффициентов матрицы AGS : |
|
NX = cos(P)cos(H) |
|
EX = cos(P)sin(H) |
(11.10) |
AX = sin(P) |
|
NY = sin(R)sin(P)cos(H)-cos(R)sin(H) |
|
EY = sin(R)sin(P)sin(H)+cos(R)cos(H) |
(11.11) |
AY = cos(P)sinR |
|
NZ = cos(R)sin(P)cos(H)+sin(R)sin(H) |
|
EZ = cos(R)sin(P)sin(H)-sin(R)cos(H) |
(11.12) |
AZ = -cos(P)cos(R) |
|
Перейдем к определению вектора bGS . Здесь необходимо следующее замечание. Начало СК сканера намеренно помещено в точку центра сканирования, т.е. центр сканирующего зеркала, т.к. это сильно упрощает многие уравнения в этой СК. В то же время, как уже отмечалось, непосредственно определяются координаты местоположения антенны, которая может быть удалена от главной точки сканирования на расстояние вплоть до нескольких метров. Обозначим через
bSA , вектор в СК сканера, определяющий местоположение антенны. Этот, чрезвычайно важный в метрологическом отношении вектор, имеет двойное значение:
с его помощью можно полностью записать уравнение связи для сканерного блока и, следовательно, корректно интерпретировать результаты сканирования в процессе постобработки;
точное знание вектора bSA является абсолютно необходимым условием корректной работы навигационного компьютера по
137
интегрированию GPS и IMU данных для получения навигационного решения.
Отметим в качестве обязательного условия строгое постоянство
вектора bSA . Это условие означает, что взаимное положение антенны и сканера должно быть измерено с достаточной точностью и не изменяться во время проведения съемки.
Определению величины вектора bSA посвящена процедура измерения выставочных ( off - set ) параметров.
С учетом изложенного выше, можем записать:
bGS = bGA - AGS bSA , |
(11.13) |
где, bGA - вектор в G , координаты которого определяются непосредственно GPS измерениями.
Полученное уравнение связи для топоцентрической СК и сканера позволяет формально описать все главные метрологические процедуры, выполняемые локатором. Представим описание операций дальномерного измерения. Каждое такое измерение выполняется по схеме, иллюстрированной на рис. 11.8.
Вектор s на этом рисунке соответствует зондирующему лучу, а его длина соответствует измеренному значению наклонной дальности. В процессе сканирования зондирующий вектор совершает колебательные движения в плоскости ОYZ . Текущее положение определяется параметром фазой сканирования, определяется углом наклона сканирующего зеркала. Главной целью каждого акта сканирования является определение координат NP, EP, AP точки, от которой произошло отражение зондирующего луча.
С учетом введенной системы обозначений дальномерное измерение можно выразить как:
b |
|
N |
|
|
|
|
|||||
|
GA |
|
|
|
|
||||||
|
|
|
GS |
|
|
|
P |
|
|
||
A |
E |
|
|
||||||||
|
|
s |
|
|
|
P |
|
. |
(11.14) |
||
|
|
|
|
|
|||||||
|
|
|
|
|
|
A |
|
|
|||
|
|
|
|
|
P |
|
|
|
|||
|
|
|
|
|
|
|
|
||||
При выводе уравнения дальномерного измерения учтем, что s x = 0;
138
s y = s sin( ); s z = s cos( ).
Подставляя это значение в общее уравнение связи получим:
N |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
s.sin( ) |
|
|
|
|
|
EP |
|
|
|
|
|
|
|
|
|
|
|
|||
= |
|
b |
|
A |
|
|
b |
(11.15) |
||||||
|
|
|
GA + |
GS |
|
( |
- |
|
SA ). |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
AP |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
s.cos( ) |
|
|
|
|
|||
На основании этого уравнения выполняется расчет всех координат лазерных точек.
11.5.2. Методы выполнения развертки
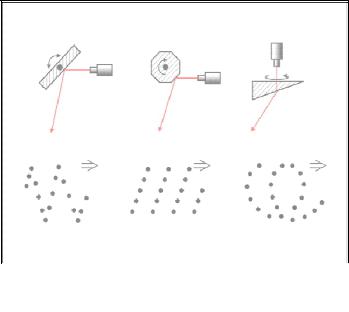
Основные схемы выполнения развертки, используемые в современных лазерных локаторах, и характерные рисунки распределения лазерных точек по поверхности сцены изображены на рисунке 11.9. Пока используются только механические методы развертки.
В качестве основного оптического элемента развертки используются:
|
Качающееся зеркало. |
|
|
|
Вращающаяся |
|
|
|
призма. |
|
|
|
Оптический клин. |
|
|
|
Рис. 11. 9 Основные схемы |
||
|
Рассмотрим достоин- |
|
организации развёртки |
ства и недостатки указанных методов организации развертки. Для этого выделим несколько
критериев, по которым будем оценивать эти достоинства и недостатки. А именно:
Простота технической реализации.
Возможность настройки (программирования) режимов сканирования.
Обеспечение максимальной равномерности распределения лазерных точек по поверхности сцены.
Другие.
139
Что касается простоты технической реализации, то все рассматриваемые схемы сканирования не представляют никаких проблем по этой позиции. Везде используется единственный движущийся оптический элемент, который в первом случае совершает колебания, а во втором и третьем вращается с постоянной угловой скоростью. Это обстоятельство облегчает юстировку и в значительной степени способствует стабильности и надежности работы оптической системы.
Наибольшие возможности по части гибкости и возможности программирования режимов сканирования обеспечивает схема с качающимся зеркалом. При использовании такой схемы имеется возможность регулировать все три главных параметра, характеризующих воздушную лазерно-локационную съемку – ширина полосы захвата S (регулируется значением амплитуды колебаний), частота сканирования f, т.е. количество линий сканирования в секунду (регулируется значением частоты колебаний). Третий важнейший параметр лазернолокационной съемки плотность сканирования d, т.е. количество лазерных точек на единицу поверхности однозначно определяется по значениям S и f. Схемы развертки с использованием призмы и оптического клина без применения дополнительных элементов не позволяют регулировать ширину полосы захвата, что на практике оказывается существенным недостатком.
Дополнительным преимуществом схемы развертки с использованием качающегося зеркала является возможность динамического управления параметрами развертки в процессе выполнения аэросъемочных работ. Благодаря этой возможности удается, например, в лидарах типа ALTM реализовать режим компенсации бокового крена, которой гарантирует покрытие заданной полосы съемки, что в значительной степени облегчает пилотирование.
Следует также отметить, что в случае использования качающегося зеркала за счет изменения закона колебаний можно получить различные траектории сканирования, как например, синусоидальную либо пилообразную.
Наибольшая равномерность распределения лазерных точек по поверхности сцены обеспечивается при использовании призмы в качестве сканирующего элемента. В этом случае рисунок сканирования состоит из набора прямых линий параллельных друг другу. Легко показать, что при заданной скорости движения носителя V, высоте съемки H, и ширине полосы захвата S можно подобрать такое значение частоты сканиро-
140