

2250
.pdfсистеме зажигания) и вспомогательных программ, производит выбор измерительных режимов и их последовательности, а также осуществляет вывод результатов. Результаты выводятся на дисплей (монитор).
∆
∆
θ
τ
Рис. 2.1. Структурная схема мотор-тестера. Измеряемые параметры: n – частота вращения коленчатого вала двигателя; ∆n – изменение частоты вращения коленчатого вала двигателя; Tм, Tв – температура масла и воздуха; U – постоянное напряжение; Uпр,U2м – пробивное и вторичное напряжение на свече и катушке зажигания; U1к – напряжение на первичной обмотке катушки зажигания; ∆U – пульсации выходного напряжения генератора; ВМТ– момент достижения верхней мертвой точки; θ – угол опережения зажигания по углу поворота коленчатого вала двигателя; I – сила тока стартера или генератора; τ – длительность горения искрового разряда на свече зажигания; f – частота импульсов.
Основные элементы: АЦП – аналого-цифровой преобразователь; КУ – калибровочное устройство; ИМУ
–измерительное многоканальное устройство; ЦУУ – центральное управляющее устройство; ВУ – внешнее управляющее устройство; ИП – источник питания; ИУ
–индикаторное устройство (цифровое табло);
Э–дисплей, экран осциллографа
20
К параметрам свойств объектов диагностирования относят эффек-
тивную мощность силовой установки, крутящий момент коленчатого вала ДВС, частоту вращения коленчатого вала, максимальную силу тока в обмотках электрических машин, углы опережения зажигания. К параметрам процессов относят температуру обмоток полюсов электрических машин, уровень шума или вибрации агрегатов машины, плотность низкозамерзающей охлаждающей жидкости в системе охлаждения, содержание вредных веществ в отработавших газах ДВС. Физическая величина (параметр), характеризующая диагностируемый объект (изделие), может быть представлена как числовым значением, так и некоторой зависимостью (формой рабочего процесса).
Рис. 2.2 Диагностирование бензинового ДВС с использованием мотор-тестера МТ-4 (производитель НПП «Новые технологические системы», г. Самара)
Усложнение технологических процессов, технических объектов, в том числе СДКМ, привело к необходимости одновременного измерения большого числа разнообразных параметров и их накопления в цифровой форме с целью последующей обработки с использованием технических средств. Таким образом, современная система технической диагностики представ-
ляет собой информационную систему, выполняющую сбор, накопление и обработку полученной информации в целях установления технического состояния объекта и определения места неисправности. Использование изме-
рительно-вычислительно-поисковых систем является отличительной чер-
той современных систем технической диагностики.
21

2.2. Формы рабочих (энергетических) процессов
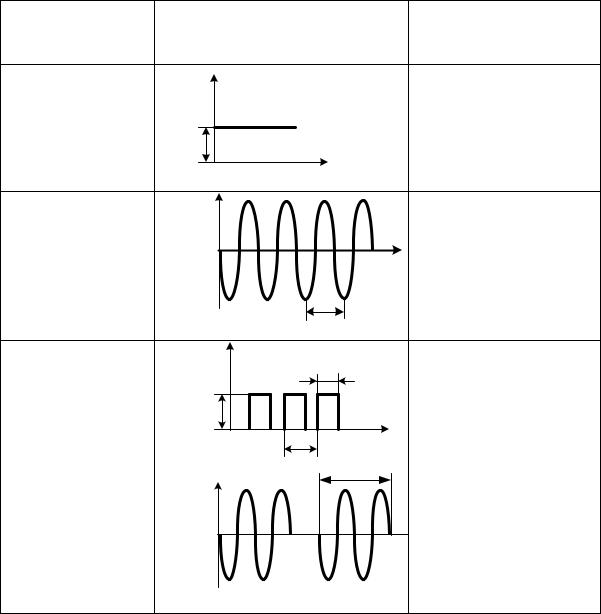
Формы рабочих процессов в общем случае представляют собой случайные функции времени и могут быть четырех видов (табл. 2.2) /20/.
Таблица 2.2
Формы и характеристики рабочих (энергетических) процессов
Виды |
Формы процессов |
Характеристика |
процессов |
|
|
|
|
Процессы непрерывные по |
Аналоговые |
|
значению и времени |
|
|
|
Процессы непрерывные по Дискретные значению и дискретные по
времени
|
|
Процессы ступенчатые по |
Квантованные |
|
значению и непрерывные |
|
по времени |
|
|
|
|
|
Процессы ступенчатые по |
Дискретно- |
значению и дискретные по |
квантованные |
времени |
22
В системах диагностирования СДКМ информация передается от одного элемента к другому в виде сигнала, в качестве которого используется любое изменение материальной среды. С помощью сигналов информация может извлекаться, храниться, передаваться, обрабатываться и пред-
ставляться на языке, доступном человеку или техническому устройству (прибору). Для передачи сигналов используются величины любой природы,
которые называются носителями информации.
2.3. Информативные параметры носителей информации
Носитель информации должен изменять свои параметры под воздействием информации. Сами по себе носители информации не являются сигналами. Однако если на какой-либо параметр носителя информации воздействует информация, то он становится сигналом.
Параметр, на который воздействует информация, называется информативным. Процесс получения сигнала называется модуляцией. Сигнал – это носитель с модулированным информативным параметром.
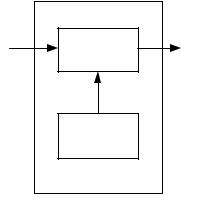
Обобщенная структурная схема информационного преобразователя (ИнП) представлена на рис. 2.3, 2.4. Для передачи информации необходимым условием является наличие носителя информации с определенными информативными параметрами. Информация по цепи преобразователей передается путем модуляции (изменения по определенному закону) информативного параметра носителя информации любой физической природы.
Модулированный выходной сигнал y(t) образуется в результате взаимодействия носителя I(t),вырабатываемого генератором носителя информации (Г), и исходного модулирующего сигнала х(t) в модуляторе (М).
При отсутствии модулирующего сигнала носители информации по форме могут быть постоянного уровня и в виде периодических (гармонических) колебаний. Такие носители могут быть непрерывными или дис-
кретными (импульсными) /20/.
Рис. 2.3. Обобщенная структурная схема ИнП с использованием носителя информации
постоянного уровня
23

Рис. 2.4. Обобщенная
структурная схема ИнП с использованием дискретного (импульсного носителя) информации
Для получения дискретных носителей используется импульсный эле-
мент (ИЭ).
Носители информации постоянного уровня имеют только один инфор-
мативный параметр – амплитуду Аm (размер, интенсивность, уровень).
Носители информации других видов имеют большее число информа-
тивных параметров:
– амплитуду Аm, частоту f, период Tп, фазу (гармонический вид – че-
тыре информативных параметра);
– амплитуду Аm,частоту f, период следования Tп, длительность (ширину) импульсов τ , фазовый сдвигϕ, скважность или относительную длительность I, а также другие информативные параметры (дискретный, импульсный вид – шесть и более информативных параметров).
Вид, формы носителей информации, а также краткие характеристики их информативных параметров представлены в табл. 2.3.
Форма носителя информации (см. табл. 2.3) определяет возможные ви-
ды модуляции.
Различают виды модуляции с использованием непрерывных носителей
/20/:
•амплитудная модуляция (АМ);
•частотная модуляция (ЧМ);
•периодная (временная) модуляция (ВМ);
•фазовая модуляция (ФМ).
Также различают виды модуляции с использованием импульсных носителей /20/:
•амплитудно-импульсная модуляция (АИМ);
•частотно-импульсная модуляция (ЧИМ);
•временно-импульсная модуляция (ВИМ);
•фазо-импульсная модуляция (ФИМ);
•широтно-импульсная модуляция (ШИМ).
24
Четыре вида модуляции: амплитудно-импульсная АИМ, широтно- |
||
импульсная ШИМ, фазо-импульсная ФИМ, частотно-импульсная ЧИМ с |
||
использованием дискретных (импульсных) носителей информации пред- |
||
ставлены на рис. 2.5. |
|
Таблица 2.3 |
|
|
|
Информативные параметры рабочих (энергетических) процессов |
||
Вид |
Форма |
Информативные |
модуляции |
|
параметры |
Постоянного уров- |
|
Аm– амплитуда |
ня (непрерывный) |
|
|
Гармонического |
|
Аm– амплитуда; |
|
f=ω /(2π ) – частота |
|
вида (непрерыв- |
|
(ω – круговая частота); |
ный) |
|
Tп = 1/ f –период; |
|
|
(ω t + ψ ) – фаза |
|
|
(ψ – начальная фаза) |
|
|
Аm– амплитуда; |
|
τ |
f – частота; |
|
|
Тп – период следования; |
|
|
τ – длительность (шири- |
Дискретного, |
|
на) импульсов; |
|
ϕ =2π tc /Тп – фазовый |
|
импульсного |
τ |
сдвиг (сдвиг относитель- |
вида |
|
но начального положения |
|
|
|
|
|
на время tc); |
|
|
I =Тп /τ – скважность |
|
|
или относительная |
|
|
длительность |
|
|
( yτ = τ /Тп – коэффици- |
|
|
ент заполнения) |
Кроме указанных видов модуляции различают кодовые модуляции
(КМ) /20/:
•амплитудно-кодовые (АКМ) с использованием непрерывных носителей;
•кодово-импульсные (КИМ) с использованием импульсных носителей.
25
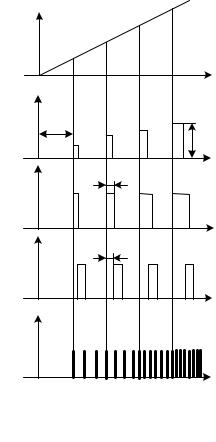
τ
Рис. 2.5. Виды модуляции с использованием дискретных (импульсных) носителей
информации
Внастоящее время получила распространение амплитудно-кодово-
импульсная модуляция (АКИМ).
Используются также такие виды модуляции, как:
•частотно-кодово-импульсная (ЧКИМ);
•временно-кодово-импульсная (ВКИМ);
•фазо-кодово-импульсная (ФКИМ);
•широтно-кодово-импульсная (ШКИМ).
Втехнических устройствах систем диагностирования СДКМ информация может передаваться и преобразовываться в виде изменения по абсолютной величине информативного параметра. Используются также преобразователи, в которых информацию содержит приращение информативного параметра. Такая модуляция называется дельта-модуляцией ( ∆- модуляция).
Вид модуляции является основной характеристикой, определяющей качество системы технической диагностики, как информационной системы. Вид модуляции и соответственно технические устройства систем диагностирования выбираются исходя из требуемых точности, быстродействия и допустимых затрат. Устройства, использующие аналоговые виды модуляции, обладают предельным быстродействием, но имеют низкую точность. Устройства, использующие кодовые виды модуляции, обладают высокой точностью, надежностью и устойчивостью к помехам, но имеют
26
более низкое быстродействие. Устройства с частотными видами модуляции по своим характеристикам занимают промежуточное положение.
Технический уровень освоения различных видов кодовой модуляции в системах управления рабочими процессами силовых установок, трансмиссий и рабочего оборудования СДКМ предъявляет соответствующие требования к техническим устройствам, предназначенным для их диагностирования. Кодовая модуляция используется в диагностических системах с элементной базой на основе цифровых информационных преобразователей, аналого-кодовых преобразователей (АКП), устройств обработки цифровой информации и управления. Электронные логические элементы, выполненные в виде микросхем, применяются для построения импульсных систем и являются основными элементами всех видов микропроцессоров (МП). Широкое внедрение технических устройств диагностики с кодовой модуляцией обусловлено тем, что при увеличении сложности затраты на их производство, внедрение и эксплуатацию возрастают незначительно и при достижении определенного уровня сложности практически остаются постоянными.
Втехнической диагностике СДКМ в период ее внедрения использовались аналоговые системы с амплитудной модуляцией. Затем использование частотных и временных видов модуляции (ЧМ, ВМ, ФМ) значительно повысило качество управления технологическими и рабочими процессами, соответственно и качество технического диагностирования агрегатов и систем машин.
Внастоящее время в системы управления машин, особенно в системы управления двигателем, внедряются устройства с кодовой модуляцией.
Примеры таких систем – микропроцессорные системы управления (МПСУ)
режимными параметрами ДВС /2, 3, 4, 10, 18, 22, 27, 29/ (рис. 2.6). В зави-
симости от назначения используются электронные системы управления дизельным ДВС, микропроцессорные системы зажигания бензиновых ДВС, электронные системы управления впрыскиванием топлива и зажигания бензиновых ДВС. Широко внедряются антиблокировочные (АБС) и противобуксовочные (ПБС) системы торможения, а также системы автоматического управления отопителем (другим вспомогательным оборудованием) машины
сиспользованием МП.
Повышению надежности МПСУ режимными параметрами агрегатами и системами СДКМ способствует применение постоянно используемых,
встроенных систем диагностирования /2, 9, 13, 22, 27, 28/. Эти системы обеспечивают пассивное и активное диагностирование. Пассивное – сбор информации о состоянии двигателя, трансмиссии, систем, обеспечивающих их работу и микроконтроллера; активное – проведение различных тестовых операций.
27
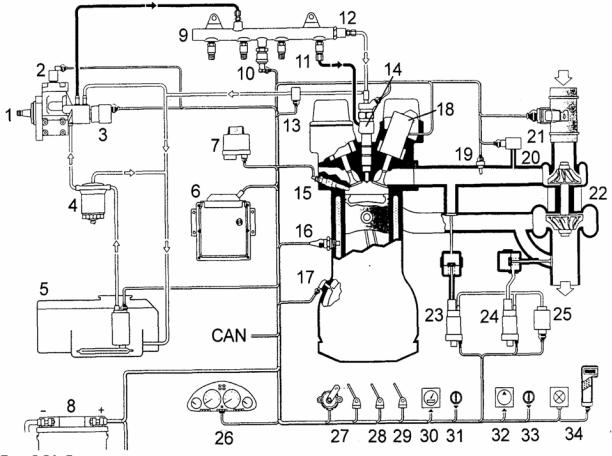
Рис. 2.6. Бензиновый ДВС с комплексом электронных систем:
1– ТНВД; 2 – электромагнитный клапан аварийного выключения подачи топлива; 3 – исполнительный электромагнитный клапан регулятора давления топлива в аккумуляторе; 4 – топливный фильтр; 5 – топливный бак с фильтром и топливоподкачивающим электронасосом; 6 – микроконтроллер; 7 – блок управления свечей накаливания; 8 – АБ; 9 – аккумулятор топлива; 10 – датчик давления топлива в аккумуляторе; 11– ограничитель расхода топлива электрогидравлической форсункой; 12 – ограничитель давления топлива в аккумуляторе; 13 – датчик температуры топлива; 14 – электрогидравлическая форсунка; 15 – свеча накаливания; 16 – датчик температуры охлаждающей жидкости; 17 – датчик положения коленчатого вала (частоты вращения); 18 – электромагнитный привод клапана газораспределения; 19– датчик температуры воздуха на всасывании; 20 – датчик давления наддува; 21
–датчик массового расхода воздуха; 22 – турбокомпрессор; 23 – электропневматический клапан системы управления рециркуляцией отработавших газов; 24 – электропневматический клапан системы регулирования наддува; 25
–вакуумный электронасос; 26 – щиток приборов; 27 – непрерывный и контактный датчики положения педали управления; 28 – контактный датчик положения педали тормоза; 29 – контактный датчики положения педали сцепления; 30 – датчик скорости автомобиля; 31 – датчик регулятора скорости автомобиля; 32 – компрессор кондиционера; 33 – датчик регулятора кондиционера; 34 – индикатор системы диагностирования с контактным разъемом для подключения диагностического прибора; CAN – линия связи
смультиплексной системой
28

По результатам диагностирования осуществляются предупредительная сигнализация и мероприятия по сохранению работоспособности МПСУ.
Диагностирование может проводиться как при неработающем двигателе или системах, так и при нормальном их функционировании. Методы диагностирования основаны на проверке правильности работы цепей, измерении характеристик сигналов в определенных точках схемы при заданных режимах работы и сравнении этих характеристик с установленными нормальными значениями, а также анализе откликов при подаче тестирующих сигналов.
Возможным дефектам присваиваются определенные коды, которые при диагностировании и наличии данного дефекта заносятся в память МПСУ и выносятся на индикаторы панели приборов машины. В ряде систем определить код дефекта можно по чередованию вспышек сигнальной лампы. В более совершенных системах цифровой код может быть выведен на жидкокристаллический экран. Наконец, в наиболее сложных системах на экран может быть выведена информация не только о дефекте, но и перечень необходимых мер, которые должен предпринять машинист (водитель) в связи с появлением дефекта или для его устранения. В частном случае это может быть указание о необходимости обратиться с заявкой на техническое обслуживание (ремонт) (рис. 2.7, 2.8, 2.9).
Рис. 2.7. Диагностирование бензинового ДВС с использованием диагностического прибора ДСТ-2М (производитель НПП «Новые технологические системы»,
г. Самара)
Рис. 2.8. Панель электронной системы «Маэст-
ро» гидравлического экскаватора 345 BL фирмы Caterpillar (электронная система обеспечивает режим электронного сканирования и тестирования агрегатов в целях поиска неисправностей)
29