

2205
.pdfВ.С. Щербаков, М.С. Корытов, А.А. Руппель, В.А. Глушец, С.А. Милюшенко
МОДЕЛИРОВАНИЕ И ВИЗУАЛИЗАЦИЯ
ДВИЖЕНИЙ МЕХАНИЧЕСКИХ СИСТЕМ
В MATLAB
Омск·2007
Федеральное агентство по образованию Сибирская государственная автомобильно-дорожная академия
(СибАДИ)
В.С. Щербаков, М.С. Корытов, А.А. Руппель, В.А. Глушец, С.А. Милюшенко
МОДЕЛИРОВАНИЕ И ВИЗУАЛИЗАЦИЯ
ДВИЖЕНИЙ МЕХАНИЧЕСКИХ СИСТЕМ
В MATLAB
Учебное пособие
Омск Издательство СибАДИ
2007
4
УДК 681.5: 621.87 ББК 32.973
М 54
Рецензенты:
заведующий кафедрой «Автоматизация и робототехника», д-р техн. наук, проф. В. Г. Хомченко (ОмГТУ); д-р техн. наук, проф. В.А.Николаев (ОмГУПС)
Работа одобрена редакционно-издательским советами академии в качестве учебного пособия по дисциплинам «Моделирование систем управления», «Проектирование систем управления» для специальности 220301 – Автоматизация технологических процессов и производств.
М54 Моделирование и визуализация движений механических систем в MATLAB:
Учебное пособие / В.С.Щербаков, М. С. Корытов, А.А. Руппель, В.А. Глушец, С.А. Милюшенко. – Омск: Изд-во СибАДИ, 2007. – 84с.
ISBN 978 – 5 –93204 –332–5
Изложены сведения о моделировании пространственных движений твердотельных машин и механизмов, такие как строительные автомобильные краны, одноковшовые экскаваторы, строительные манипуляторы и др., на стадии инженерного проектирования. Приведены описания основных элементов библиотеки SimMechanics. Подробно описаны принципы формирования моделей пространственных механизмов и машин в среде SimMechanics. Показана возможность визуализации движений пространственных механизмов и машин с использованием встроенных средств
SimMechanics, а также с помощью пакета Virtual Reality Toolbox.
Учебное пособие может быть полезно студентам механических специальностей и специальности «Автоматизация технологических процессов и производств» при курсовом и диплом проектировании, а также аспирантам при подготовке диссертаций.
Табл. 2. Ил. 83. Библиогр.: 4 назв.
ISBN 978 – 5 –93204 –332–5 |
В.С. Щербаков, М. С. Корытов, А.А. Руп- |
пель, |
В.А. Глушец, С.А. Милюшенко, 2007 |
|
|
ОГЛАВЛЕНИЕ |
Введ- |
4 |
ние.................................................................................................................. |
|
1.Библиотека блоков пакета SimMechanics………………………………. 6
1.1.Блоки твердых тел (Bodies) . . . . . . . . . . . . . . . . . . . . . . . . . . 7
…………..
1.2.Блоки шарнирных сочленений (Joints) . . . . . . . . . . . . . . . . 13
……………
1.2.1. Разобранные шарниры Disassembled Joints . . . . . . . 20
…………….
1.2.2.Безынерционные соединители Massless Connectors . …………... 24
1.3.Блоки связи механических блоков SimMechanics с обычными S-
блоками Simulink (виртуальные регистраторы и возбудители движе- |
26 |
||
ния Sensors & Actuators) . . . . . . . . . . . . |
……………………………… |
||
1.4. Блоки стационарных и нестационарных связей |
|
36 |
|
Constraints & Drivers . . . . . . . . . . . . |
. . . . . . . . . . . . . . . . . . |
. |
|
…………… |
|
|
|
1.5. Блоки упруговязких элементов Force Elements . . . . . . . . |
…………… |
39 |
|
1.6. Вспомогательные механические блоки Utilities . . . . . . . . |
. …………. 44 |
||
1.7. О топологии механизмов в SimMechanics . . . . . . . . . . . . . . 46
………….. |
|
51 |
|
2. |
Моделирование рабочих движений автокрана . . . . . . . . . . . . . |
............. |
|
3. |
Возможности визуализации движений в SimMechanics . . . . . . |
……… |
62 |
|
3.1. Визуализация встроенными средствами SimMechanics |
. . |
62 |
................... |
|
|
|
|
3.2. Создание собственной пользовательской анимации с использовани- |
66 |
|
|
ем пакета Virtual Reality Toolbox …………………………………………. |
||
Библиографический список . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
|
84 |
|
………… |
|
|
|
3
ВВЕДЕНИЕ
SimMechanics – это отдельная библиотека пакета Simulink среды MATLAB, предназначенная для моделирования механического движения твердых тел. Основное ее назначение – это моделирование пространственных движений твердотельных машин и механизмов на стадии инженерного проектирования, используя законы теоретической механики [1, 2].
При использовании библиотеки SimMechanics, интегрированной в Simulink, могут быть использованы все возможности системы MATLAB, в частности, добавление к модели механической системы компонентов из других библиотек Simulink и расширений системы. Пакет SimMechanics позволяет решать пространственные задачи статики, кинематики и динамики многозвенных механических объектов.
К достоинствам реализации моделирования механических систем при помощи SimMechanics в Simulink могут быть отнесены простота создания моделей не слишком подготовленными пользователями и высокая скорость вычислений при моделировании движений многозвенных объектов с большим числом степеней свободы в больших перемещениях. Механическая система представляется связанной блочной диаграммой, подобно другим моделям Simulink, с использованием блоков из библиотеки SimMechanics. В качестве задаваемых параметров механических блоков выступают массовоинерционные свойства тел (звеньев механизмов), координаты характерных точек тел (такие, как центры масс, точки приложения внешних и управляющих воздействий, точки присоединения шарниров и сочленений). В отличие от других блоков Simulink, которые выполняют математические действия или обрабатывают сигналы, механические блоки SimMechanics представляют непосредственно физические тела или связи между ними. Моделируемые механические системы могут состоять из любого количества твердых тел, связанных шарнирами, имеющими поступательные и вращательные степени свободы. SimMechanics может моделировать механизмы со звеньями, организованными в иерархические структуры, как и в обычных моделях Simulink. Возможно наложение кинематических ограничений, сил и вращающих моментов, взаимных траекторий движения тел.
В SimMechanics термин «механизм» имеет два значения. Вопервых, он обозначает физическую систему, которая включает, по
4
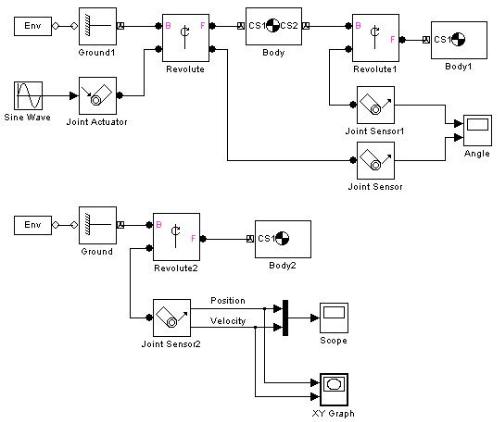
крайней мере, одно твердое тело. Также он обозначает топологически отдельную блочную диаграмму, представляющую один физический механизм. Модель может включать один или более механизмов. Модель SimMechanics состоит из блочной диаграммы, которая, в свою очередь, состоит из одного или более механизмов, каждый из которых представляет собой набор соединенных между собой узлов, представляющих единственный физический механизм. Например, следующая модель (рис. 1) содержит два механизма.
Рис. 1. Пример модели SimMechanics из двух механизмов
Модель SimMechanics значительно отличается от других моделей Simulink по тому, как она изображает механизм. Обычная модель Simulink отображает математические данные движения механизма, т. е. алгебраические и дифференциальные уравнения, которые рассчитывают будущее состояние механизма в зависимости от его настоящего состояния.
Математическая модель Simulink позволяет имитировать механизм. Напротив, модель SimMechanics изображает физическую структуру механизма, геометрические и кинематические отношения
5
его компонентов. SimMechanics автоматически преобразует это структурное изображение во внутреннюю, эквивалентную математическую модель. Это экономит время и усилия исследователя по самостоятельной разработке математической модели.
Создание модели SimMechanics происходит таким же способом, как создание любой другой модели Simulink. Сначала открывается окно модели Simulink. Затем мышью перетаскиваются образцы блоков SimMechanics и других блоков Simulink в окно пользовательской модели и рисуются линии, чтобы соединить блоки между собой.
Основные блоки тел Bodies отображают составные части механизма и неподвижное окружение механизма (основание). Узловые блоки шарниров Joints изображают степени свободы одной части механизма относительно другой или основания. Блоки стационарных и нестационарных связей Constraints & Drivers ограничивают или запускают движения частей механизма относительно друг друга.
Блоки возбудителей механизма Actuators задают приложенные усилия, движения, меняющиеся массу и инерцию или первоначальные условия для частей механизма, узлов шарниров и связей.
Блоки силовых упруговязких элементов Force Elements моделируют усилия между частями механизма.
Сенсорные блоки Sensors измеряют усилия или движения частей механизма, узлов шарниров и связей.
Встроенные инструментальные средства визуального наблюдения SimMechanics позволяют запустить 3-D анимацию объекта в процессе моделирования, используя графические возможности сис-
темы MATLAB.
1. БИБЛИОТЕКА БЛОКОВ ПАКЕТА SimMechanics
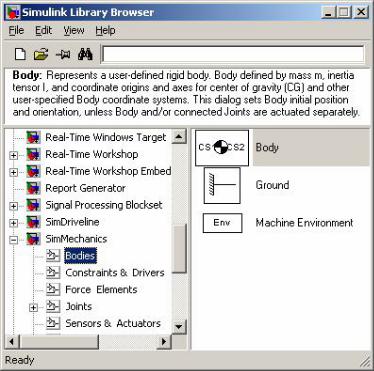
Также, как все остальные библиотеки Simulink, библиотека пакета SimMechanics представляет собой набор блоков в виде графических пиктограмм с оригинальными названиями на английском языке. Для их просмотра, выбора и перетаскивания мышью в окно создаваемой Simulink-модели (в дальнейшем S-модели) служит окно браузера библиотек Simulink (рис. 2).
Как видно на рис. 2, в библиотеке SimMechanics (в MATLAB7) всего шесть разделов [1, 2]:
1.1. Bodies;
6

1.2.Constraints & Drivers;
1.3.Force Elements;
1.4.Joints;
1.5.Sensors & Actuators;
1.6.Utilities.
Каждый раздел содержит блоки определенной группы. Рассмотрим их более подробно.
Рис. 2. Окно браузера библиотек Simulink, разделы пакета SimMechanics
1.1. Блоки твердых тел (Bodies)
Данный раздел библиотеки SimMechanics можно считать основополагающим. С него необходимо начинать при создании любой механической модели, хотя он содержит всего три блока (рис. 3):
−Body;
−Ground;
−Machine Environment.
1. Блок Body представляет собой твердое жесткое тело (отдельное звено механизма, движения которого моделируются) с определенными пользователем параметрами.
7
В качестве задаваемых параметров выступают:
- масса тела (Mass) (рис. 4), которая может быть выражена в различных единицах (имеется выпадающий список, по умолчанию стоят килограммы);
Рис. 3. Блоки твердых тел Bodies
- тензор инерции тела относительно его центра масс (Inertia), представляющий собой матрицу размером 3 3:
|
Jix |
0 |
0 |
|
|||
H |
|
0 |
J |
iy |
0 |
, |
|
|
|
|
|
J |
|
|
|
|
0 |
0 |
|
|
|||
|
|
|
|
|
|
iz |
|
где Jix, Jiy, Jiz, – осевые моменты инерции тела относительно осей собственной локальной системы координат, связанной с его центром масс. Для ряда наиболее распространенных симметричных тел простой геометрической формы формулы для вычисления элементов тензора инерции приведены в табл. 1;
- декартовы координаты характерных точек, связанных с телом (Origin position vector [x y z]). В частности, обязательно должны быть указаны координаты центра тяжести тела CG и, при необходимости,
8
координаты произвольного числа других характерных точек CS1, CS2, CS3, … CSN, таких как центры шарниров, связанных с данным телом, или точки приложения внешних сил и моментов.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1 |
|||
Элементы тензора инерции ряда тел простой формы |
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Форма тела |
|
|
|
|
|
|
|
|
|
|
|
|
|
Формулы для вычисления |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
Jix |
|
|
|
|
|
|
|
|
|
|
|
|
|
Jiy |
|
|
|
|
|
|
|
|
|
Jiz |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Тонкий стержень длиной L |
|
|
|
1/12(m·L2) |
|
|
|
|
|
|
1/12(m·L2) |
|
|
0 |
|
|
|
|||||||||||||||||||||||
вдоль оси Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сфера радиусом R |
|
|
|
|
2/5(m·R2) |
|
|
|
|
|
|
|
2/5(m·R2) |
|
|
|
|
2/5(m·R2) |
|
|||||||||||||||||||||
|
|
1 |
|
|
|
2 |
|
|
1 |
|
2 |
|
1 |
|
|
|
2 |
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||
Цилиндр радиусом R и высо- |
|
|
m R |
|
|
|
|
h |
|
|
|
|
|
|
m R |
|
|
|
|
h |
|
|
|
|
|
|
|
2 |
) |
|
||||||||||
4 |
|
3 |
|
4 |
|
3 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
той h с осью вращения Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/2(m·R |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Прямоугольный параллелепи- |
|
|
1 |
|
m b2 |
c2 |
|
|
|
1 |
|
m a2 |
c2 |
|
1 |
|
m a2 |
b2 |
|
|||||||||||||||||||||
пед со сторонами a, b и c |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
вдоль осей X, Y и Z соответст- |
|
|
12 |
12 |
12 |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
венно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
3 |
|
|
2 |
|
|
|
2 |
|
1 |
|
|
|
3 |
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||
Конус базового радиуса R |
и |
|
|
m |
|
R |
|
|
h |
|
|
|
|
|
|
m |
|
R |
|
|
h |
|
|
|
|
3/10(m·R2) |
|
|||||||||||||
4 |
|
|
|
|
4 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
высоты h с осью вращения Z |
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Эллипсоид с размерами a, b и |
|
|
|
1 |
m b2 c2 |
|
|
|
|
|
1 |
m a2 c2 |
|
|
|
1 |
m a2 |
b2 |
|
|||||||||||||||||||||
c вдоль осей X, Y и Z соответ- |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
5 |
|
|
|
|
|
|
|
5 |
||||||||||||||||||||||||||||||
ственно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для добавления, удаления и перемещения строк, каждая из которых связана с определенной точкой, служит группа кнопок
 .
.
Для того, чтобы добавить или убрать изображение входа/выхода определенной точки на пиктограмме блока Body в окне модели, используется установка или сброс флажка в колонке Show port.
В колонке Translated from origin of указывается имя системы координат (характерной точки), от начала которой отсчитываются координаты текущей характерной точки. Как минимум одна характерная точка (любая, в том числе это может быть и центр тяжести тела CG) должна быть задана в системе координат WORLD либо в систе-
9