

2205
.pdfодин вектор, для чего необходимо поставить флажок в поле Output selected parameters as one signal.
Рис. 25. Настройка параметров блока Body Sensor
1.3. Блок Variable Mass & Inertia Actuator позволяет изменять массу и/или тензор инерции тела в собственной локальной системе координат тела как функцию времени прямо в процессе моделирования. Значение массы и/или тензора инерции должно быть подано в виде векторного сигнала Simulink на вход блока.
Блоки группы 2 задают или измеряют относительное движение отдельного примитива шарнирного сочленения, к порту которого присоединены. Примитив должен быть выбран в окне настройки блока.
2.1. Блок Joint Actuator позволяет задать как функцию времени:
-либо силовое воздействие между элементами примитива, имя которого выбирается из выпадающего списка в верхнем поле
Connected to primitive;
-либо относительное движение элементов этого примитива.
30

Рис. 26. Настройка параметров блока |
Рис. 27. Настройка параметров блока |
Joint Actuator |
Joint Sensor |
Установка вида возбуждения (силовое воздействие Generalized forces или движение Motion) осуществляется при помощи переключателя (рис. 26). Выбрать примитив можно лишь в том случае, если блок Joint Actuator уже присоединен к дополнительному порту како- го-либо блока Joint.
Когда выбран вид возбуждения Motion, относительное движение частей примитива должно быть подано в виде векторного сигнала Simulink вида [перемещение; скорость; ускорение] на вход блока Joint Actuator. В случае силового возбуждения на вход подается скалярный сигнал.
31
2.2. Блок Joint Sensor позволяет в общем случае измерить следующие характеристики относительного движения частей примитива, выбранного из выпадающего списка в верхнем поле Connected to primitive (рис. 27):
-угол (Angle) – угол поворота части примитива, соединенной с телом Follower, относительно его части, соединенной с телом Base;
-относительную угловую скорость (Angular velocity);
-относительное угловое ускорение (Angular acceleration);
-вычисленный момент (Computed torque) – полный момент сил, вызывающий относительное угловое ускорение;
-позицию (Position) – перемещение части примитива, соединенной с телом Follower, относительно его части, соединенной с телом
Base;
-скорость (Velocity) – относительная скорость;
-ускорение (Acceleration) – относительное ускорение;
-вычисленную силу (Computed force) – полную силу, вызывающую относительное ускорение;
-кватернион (Quaternion) – вектор из четырех компонент, описывающих текущее угловое положение частей сферического примитива.
Кватернион q определяется по формуле
q=[nX·sin(θ/2); nY·sin(θ/2); nZ·sin(θ/2); cos(θ/2)],
где nX, nY, nZ – компоненты единичного вектора, определяющего ось поворота тела Follower на сферическом примитиве; θ – угол поворота вокруг указанной оси;
-производная кватерниона (Quaternion, derivative) – вектор из четырех компонент, каждая из которых является производной по времени от соответствующей компоненты вектора Quaternion;
-вторая производная кватерниона (Quaternion, second derivative)
–вектор из четырех компонент, каждая из которых является второй производной по времени от соответствующей компоненты вектора
Quaternion;
-момент реакции (Reaction torque) – момент реакции относительно оси примитива;
-реакция (Reaction force) – сила реакции вдоль оси примитива. Для выбора необходимых измеряемых параметров служит про-
становка флажков в соответствующих полях. Поскольку примитив, выбранный в поле Connected to primitive, может быть одного из трех
32

типов (поступательного P, вращательного R или сферического S), не все перечисленные характеристики могут быть измерены для конкретного примитива. Некоторые поля в окне настройки при выборе примитива становятся неактивными.
2.3. Блок Joint Initial Condition занимает особое положение среди других блоков раздела Sensors & Actuators. Он задает начальное относительное положение и начальную относительную скорость двух частей элементарных примитивов R-типа (Revolute) или P-типа (Prismatic) какого-либо шарнира. При помощи одного блока Joint Initial Condition могут быть заданы начальные условия положения и скорости для всех примитивов шарнира, к которому он подключен, либо только для части примитивов шарнира. Выбор примитивов осуществляется простановкой флажков в полях колонки Enable окна настройки блока (рис. 28). То есть начальные условия задаются по отдельным степеням свободы шарнира. Начальное положение – в полях колонки Position, начальная скорость – в полях колонки Velocity. Сферические примитивы S-типа не могут быть инициализированы при помощи блока Joint Initial Condition.
Рис. 28. Настройка параметров блока Joint Initial Condition
2.4. Блок Joint Stiction Actuator (рис. 29) позволяет моделировать «захват» отдельного примитива шарнирного сочленения силами вязкого и сухого трения в оси примитива.
33

|
|
|
|
|
|
|
|
В качестве задаваемых в окне |
|
|
|
|
|
|
|
|
настройки параметров блока вы- |
External Actuation |
|
|
|
|
|
|
|
|
Kinetic Friction |
|
|
|
|
B |
|
|
ступают (рис. 30): |
|
|
|
|
|
|
|||
|
|
|
|
F |
|
|
||
Foward Stiction Limit |
|
|
|
|
|
|
- примитив, который выбира- |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
ется в поле Connected to primitive; |
|
Static Friction |
|
|
|
|
|
|
|
|
|
|
|
|
Bearing |
||||
Reverse Stiction Limit |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- единицы измерения сил/ |
|
|
|
|
|
|
|
|
|
|
Joint Stiction Actuator |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
моментов; |
Рис. 29. Вид блока Joint Stiction |
- порог относительной скоро- |
|||||||
сти Velocity threshold (MKS-SI |
||||||||
Actuator в окне модели |
units), ниже которой шарнир бло- |
|||||||
|
|
|
|
|
|
|
|
|
кируется силами статического трения.
Рис. 30. Настройка параметров блока
Joint Stiction Actuator
На вход блока в процессе моделирования должны подаваться в виде скалярных сигналов (см. рис. 29):
-внешнее усилие/момент External Actuation;
-усилие/момент кинетического трения Kinetic friction;
-нижний предел статического трения Forward Stiction Limit;
-тестовое значение статического трения Static Friction;
-верхний предел статического трения Reverse Stiction Limit.
34

Сферические примитивы S-типа не могут захватываться при по-
мощи блока Joint Stiction Actuator.
Блоки группы 3 возбуждения нестационарных связей Driver Actuator (рис. 31) и измерения стационарных и нестационарных связей Constraint & Driver Sensor (рис. 32) имеют ограниченную область применения.
Рис. 31. Настройка параметров блока |
Рис. 32. Настройка параметров блока |
Driver Actuator |
Constraint & Driver Sensor |
3.1. В частности, при помощи блока Driver Actuator, как становится ясно из его названия, возбуждаться могут только блоки нестационарных связей типа Driver. На вход блока Driver Actuator должен подаваться вектор из трех компонент: [перемещение; скорость; ускорение]. Для нестационарной связи в виде поступательного перемещения единицы измерения компонент указанного вектора будут линейными, а для нестационарной связи по углу поворота – угловыми3.2. Измерители. Constraint & Driver Sensor могут быть подсоединены и к блокам стационарных связей (ограничителей типа Constraint), и к блокам нестационарных связей типа Driver. Однако они могут измерять только силу и/или момент силы реакции в связи.
35
1.4. Блоки стационарных и нестационарных связей
Constraints & Drivers
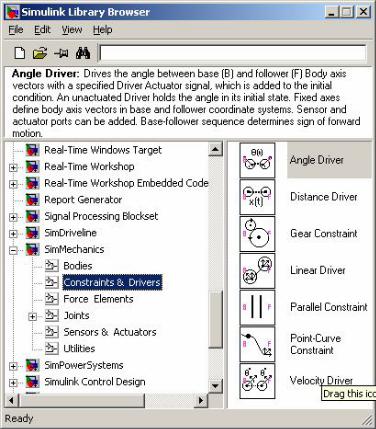
Блоки раздела Constraints & Drivers (рис. 33) позволяют моделировать стационарные и нестационарные ограничения на перемещения между телами. Ограничения, не зависящие от времени, являются стационарными, названия соответствующих им блоков включают слово Constraint. Ограничения, изменяющиеся как функция времени, являются нестационарными, названия соответствующих им блоков включают слово Driver.
Рис. 33. Блоки стационарных и нестационарных связей Constraints & Drivers
В соответствии с данным признаком все блоки раздела Constraints & Drivers могут быть разделены на две группы:
Группа 1. Блоки стационарных связей: 1.1. Parallel Constraint; 1.2. Point-Curve Constraint; 1.3. Gear Constraint.
36
Группа 2. Блоки нестационарных связей: 2.1. Distance Driver;
2.2.Angle Driver; 2.3. Linear Driver; 2.4. Velocity Driver.
Рассмотрим особенности использования блоков по группам.
Все блоки группы 1 типа Constraints допускают подключение виртуальных измерителей Constraint & Driver Sensor (но не блоков типа Actuator).
1.1.Блок Parallel Constraint задает связь двух осей двух систем координат, одна из которых связана с ведущим телом (Base), а другая
сведомым телом (Follower). Заданные две оси систем координат остаются во время движения параллельны друг другу. В качестве параметров блока выступают векторы направления параллельных осей вида [X Y Z] и система координат, в которой задается вектор (инерциальная WORLD, связанная с телом Base или связанная с телом Follower).
1.2.Блок Point-Curve Constraint ограничивает движение точки в теле Base таким образом, чтобы расстояние от этой точки до кривой в теле Follower было постоянным. Кривая определяется сплайнинтерполяцией заданных опорных точек в теле Follower. Координаты опорных точек считаются заданными в той системе координат, к порту которой на блоке Body Follower подключен порт F блока PointCurve Constraint. В качестве параметров блока выступают три векто-
ра [X0, X1, ..., XN+1]; [Y0, Y1, ..., YN+1]; [Z0, Z1, ..., ZN+1], задаю-
щие координаты опорных точек кривой. Векторы должны иметь одинаковый размер.
1.3.Блок Gear Constraint позволяет моделировать обкат двух тел подобно зубчатому зацеплению двух зубчатых колес с заданными радиусами делительных окружностей. Передаточное отношение определяется как у зубчатой передачи, в виде отношения диаметров делительных окружностей. В качестве параметров блока выступают два условных радиуса: делительной окружности ведущего тела Base и делительной окружности ведомого тела Follower.
Блоки группы 2 нестационарных связей типа Driver требуют подключения к ним блоков Driver Actuator для того, чтобы реализовать изменение связи во времени. Если блок Driver Actuator не будет подключен к дополнительному порту блока типа Driver, то последний будет моделировать стационарную связь. Подключение виртуальных измерителей Constraint & Driver Sensor также возможно.
37
2.1.Блок Distance Driver позволяет изменять расстояние между двумя точками тел Base и Follower согласно временной зависимости, задаваемой блоком Driver Actuator. Задание определенных параметров в окне настройки блока Distance Driver не требуется, кроме числа дополнительных входных/выходных портов.
2.2.Блок Angle Driver позволяет изменять угол между двумя указанными осями систем координат, связанных с телами Base и Follower, согласно временной зависимости, задаваемой блоком Driver Actuator. В окне настройки блока Angle Driver требуется указать направления двух осей систем координат: первой для тела Base, второй для тела Follower. Направления указываются в виде векторов вида [X Y Z]. Также требуется выбрать системы координат, в которых задаются векторы (инерциальная WORLD, связанная с телом Base или телом Follower).
2.3.Блок Linear Driver изменяет проекцию расстояния между двумя точками тел Base и Follower на указанную ось инерциальной системы координат согласно временной зависимости, задаваемой блоком Driver Actuator. В окне настройки блока Linear Driver требуется выбрать из выпадающего списка одну из трех осей системы ко-
ординат WORLD: X, Y или Z.
2.4.Блок Velocity Driver управляет линейной комбинацией спроецированных линейных и/или угловых скоростей двух точек тел Base и Follower на указанную ось заданной системы координат согласно временной зависимости, задаваемой блоком Driver Actuator.
38

Рис. 34. Настройка параметров блока Velocity Driver
В окне настройки блока Velocity Driver требуется задать (рис. 34): - линейные (Linear velocity) и угловые (Angular velocity) ко-
эффициенты скорости в виде векторов [X Y Z] для тела Base; - аналогичные коэффициенты для тела Follower.
Также требуется выбрать системы координат, на которые проецируются векторы скоростей для тела Base и тела Follower.
По умолчанию во всех полях систем координат выбрана система
WORLD.
1.5.Блоки упруговязких элементов Force Elements
Вверсии MATLAB7 в библиотеку SimMechanics добавлен раздел упруговязких элементов Force Elements.
39