

1760
.pdfМинистерство образования Российской Федерации Сибирская государственная автомобильно-дорожная академия ( СибАДИ )
В.С. Щербаков, А.А. Руппель, В.А. Глушец
ОСНОВЫ МОДЕЛИРОВАНИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
И ЭЛЕКТРОТЕХНИЧЕСКИХ СИСТЕМ В СРЕДЕ MATLAB И SIMULINK
Учебное пособие
Омск Издательство СибАДИ
2003
УДК 681.06:621.3 ББК 32.973.26-018.2
Щ 61
Рецензенты:
доктор технических наук, профессор С.Ф. Абдулин (ОмГИС), доктор технических наук, профессор И.Г. Браилов (ОмГТУ)
Работа одобрена редакционно-издательским советом академии и учебнометодическим советом факультета ТТМ в качестве учебного пособия по дисциплинам “Теория автоматического управления”, “Автоматизация технологических процессов и производств”, “Проектирование систем управления” для специальности 210200 – Автоматизация технологических процессов и производств.
Щербаков В.С., Руппель А.А., Глушец В.А. ОСНОВЫ МОДЕЛИРОВАНИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И ЭЛЕКТРОТЕХНИЧЕСКИХ СИСТЕМ В СРЕДЕ MATLAB И SIMULINK: Учебное пособие. – Омск: Изд-во СибАДИ, 2003. – 160 с.
Предназначено для студентов всех форм обучения по специальностям, изучающим основы теории автоматического управления, теоретические основы электротехники и электропривода.
Учебное пособие в простой и доступной форме знакомит читателей с программными продуктами MАTLAB и Simulink. Приводятся типовые структурные схемы систем автоматического управления и их характеристики. Рассмотрены задачи анализа и синтеза как линейных, так и нелинейных систем автоматического управления. Приведены примеры моделирования электротехнических схем. Изложение сопровождается подробно разработанными примерами, иллюстрациями, пиктограммами.
Ил. 165. Библиогр.: 20 назв.
ISBN 5 – 93204 – 154 – 4 |
© В.С. Щербаков, А.А. Руппель, |
|
В.А. Глушец, 2003 |
|
© Издательство СибАДИ, 2003 |
2
Оглавление
1. Знакомство с программным продуктом MATLAB...................... |
6 |
1.1.Основные сведения о системе MATLAB...................................... |
6 |
1.2. Пользовательский интерфейс MATLAB...................................... |
7 |
1.2.1.Командное меню.............................….................................. 8
1.2.2.Панель инструментов.......................................……............ 9
1.2.3.Панель запуска компонентов системы и браузер рабочего пространства................................................…..... 10
1.2.4.Окно истории сессии и браузер текущей директории….. 11
2. Пакет моделирования динамических систем Simulink............... |
12 |
2.1.Назначение и функции пакета Simulink........................................ |
12 |
2.1.1. Командное меню браузера библиотек...........................….. |
14 |
2.1.2. Панель инструментов браузера библиотек Simulink......... |
15 |
2.2. Блоки библиотеки Simulink........................................................... |
16 |
2.2.1.Continuous – раздел непрерывных блоков....................….. 16
2.2.2.Discrete – раздел дискретных блоков............................….. 16
2.2.3. Function & Tables – раздел блоков функций и таблиц..… |
17 |
2.2.4. Math – раздел математических блоков...........................… |
17 |
2.2.5. Nonlinear – раздел нелинейных блоков........................….. |
19 |
2.2.6. Signal & Systems – раздел блоков сигналов и систем...… |
20 |
2.2.7. Sinks – раздел блоков получателей сигналов................…. |
22 |
2.2.8. Sources – раздел блоков источников сигналов.................. |
22 |
2.2.9. Библиотека Simulink Extras..............................................… |
23 |
2.2.9.1.Additional Discrete – дополнительные дискретые блоки..……………………………………………… 24
2.2.9.2.Additional Linear – дополнительные линейные блоки........………………………………………….. 24
2.2.9.3. Дополнительные блоки Additional Sinks....……… 25
2.2.9.4.Блоки триггеров Flip Flops............................…….. 26
2.2.9.5.Раздел преобразований Transformations..........…... 27
2.3. Создание модели устройства в программе Simulink................... |
27 |
2.3.1.Создание нового окна модели.......................................….. 27
2.3.2.Панель инструментов.....................................................….. 28
2.3.3.Командное меню.............................................................….. 29
2.3.4.Размещение блоков в окне модели................................…. 30
2.3.5.Выделение блока или группы блоков в окне модели..…. 31
2.3.6.Сохранение модели.........................................................…. 31
2.3.7.Установка параметров блоков, входящих в модель.....…. 31
2.3.8.Установка параметров моделирования..........................…. 31
2.3.9. Добавление надписей и текстовых комментариев……… 33
3
2.3.10.Соединение блоков между собой..........................……... 34
2.3.11.Создание отвода линий...........................................…….. 34
2.3.12.Удаление соединений..............................................…….. 35
2.3.13.Изменение размеров блоков...................................…….. 35
2.3.14. Перемещение блоков и вставка блоков в соединение... 35
2.3.15.Печать текущей модели...........................................……. 35
2.3.16.Вставка модели в текстовые редакторы………………. 36
2.3.17. Создание простейшей модели.......................................... |
36 |
3. Вид переходных процессов и частотных характеристик типо- |
|
вых динамических звеньев............................................................... |
41 |
3.1. Переходные характеристики звеньев.......................................... |
41 |
3.2. Частотные характеристики звеньев............................................. |
42 |
3.3. Получение переходных и частотных характеристик................. |
43 |
3.4. Идеальное усилительное (безынерционное) звено.................... |
51 |
3.5. Апериодическое (инерционное) звено........................................ |
55 |
3.6. Колебательное звено.........................................................……… |
57 |
3.7.Интегрирующее звено.....................................................………. 58
3.8.Дифференцирующее звено.............................................………. 60
3.9.Звено с постоянным запаздыванием..............................………. 62
4. |
Способы соединения звеньев в структурную схему..................... |
65 |
|
4.1. Последовательное соединение звеньев........................................ |
65 |
|
4.2. Параллельное соединение звеньев............................................... |
65 |
|
4.3. Звено, охваченное обратной связью............................................. |
66 |
5. |
Решение задач анализа линейных систем автоматического |
|
|
управления........................................................................................... |
67 |
|
5.1. Понятие устойчивости и критерии устойчивости систем ав- |
|
|
томатического управления............................................................... |
67 |
5.1.1.Критерий устойчивости по корням характеристического уравнения.........................................................................…. 69
5.1.2. Частотный критерий устойчивости Найквиста...... |
70 |
5.2. Определение запасов устойчивости систем автоматического |
|
управления............................................................................................. |
73 |
5.3. Показатели качества переходных процессов............................... |
75 |
5.4. Общая методика анализа линейных систем автоматического |
|
управления.............................................................................................. |
80 |
6. Решение задач синтеза линейных систем автоматического |
|
управления, коррекция их динамических свойств...................... |
87 |
6.1. Назначение и виды коррекции динамических свойств систем |
|
автоматического управления............................................................... |
87 |
6.2. Получение передаточных функций регуляторов в пакете |
|
Simulink................................................................................................... |
90 |
6.3. Общая методика синтеза линейных систем автоматического |
|
4 |
|
|
управления.............................................................................................. |
92 |
|
6.4. Приложение для синтеза корректирующих звеньев SISO De- |
|
|
sign Tool...........................................................................................…... |
97 |
|
6.4.1. Командное меню................................................................... |
98 |
|
6.4.2. Панель инструментов........................................................... |
105 |
|
6.4.3. Работа с приложением SISO Design Tool........................... |
106 |
|
6.4.4. Синтез по управляющему воздействию............................. |
107 |
|
6.4.5. Синтез по возмущающему воздействию............................ |
112 |
7. |
Анализ простейших структур при случайных возмущающих |
|
|
воздействиях......................................................................................... |
117 |
|
7.1. Понятие случайной величины и случайного процесса. Законы |
|
|
распределения случайных величин...................................................... |
117 |
|
7.2. Прохождение случайного сигнала через линейную систему.... |
119 |
8. |
Нелинейные блоки пакета Simulink................................................ |
125 |
|
8.1. Блок ограничения Saturation......................................................... |
126 |
|
8.2. Блок с зоной нечувствительности Dead Zone.............................. |
127 |
|
8.3. Релейный блок Relay...................................................................... |
128 |
|
8.4. Блок с ограничением скорости Rate Limiter................................ |
130 |
|
8.5. Блок следящего квантования Quantizer........................................ |
130 |
|
8.6. Блок фрикционных эффектов Coulombic and Viscous Friction.. |
131 |
|
8.7. Блок люфта Backlash...................................................................... |
132 |
|
8.8. Блоки-переключатели Switch........................................................ |
133 |
9. Пакет Nonlinear Control Design (NCD) Blockset.............................. |
135 |
|
|
9.1. Основные правила работы с NCD................................................. |
135 |
|
9.2. Оптимизация коэффициента передачи И-регулятора................. |
137 |
|
9.3. Меню окна блока NCD Output....................................................... |
140 |
|
9.4. Особенности решаемых задач....................................................... |
141 |
10. Моделирование электротехнических систем................................ |
143 |
|
|
10.1. Состав библиотеки Power System Blockset................................. |
144 |
|
10.1.1. Состав библиотеки Electrical Sources.............................. |
144 |
|
10.1.2. Соединительные элементы Connction............................. |
145 |
|
10.1.3. Библиотека компонентов Elements.................................. |
146 |
|
10.1.4. Состав библиотеки Power Electronics………………….. |
147 |
|
10.1.5. Блоки измерений Measurements....................................... |
148 |
|
10.1.6. Библиотека электрических машин Machines................. |
149 |
|
10.1.7. Расширенная библиотека Powerlib Extras...................... |
151 |
|
10.2. Пример расчета электрических цепей постоянного тока......... |
153 |
10.3.Пример расчета однофазных электрических цепей синусои-
дального тока..........................................................................………... 155
10.4.Пример моделирования асинхронного электрического дви-
гателя с короткозамкнутым ротором...........................................…… |
158 |
Библиографический список....................................................................... |
160 |
5 |
|
1. ЗНАКОМСТВО С ПРОГРАММНЫМ ПРОДУКТОМ MATLAB
1.1. Основные сведения о системе MATLAB
Использование персональных компьютеров в учебном процессе позволяет облегчить труд преподавателя и дать практические навыки в решении тех или иных задач, возникающих в процессе обучения. Для этих целей используется целый набор интегрированных программных систем и пакетов программ, охватывающих практически весь спектр решаемых задач. В частности, средства для автоматизации математических расчетов: Reduce, Derive, TK Solver, Mathcad, Mathematica, Maple V, MATLAB и многие другие.
Система автоматизации математических расчетов MATLAB является одной из старейших и мощнейших в этой области. Название системы произошло от сокращения – МАТричная ЛАБоратория (MATrix LABoratory), но эта ориентация программы практически не ощущается теми пользователями, которые не интересуются непосредственно матричными вычислениями, вследствие проработанности и продуманности синтаксиса языка программирования системы.
Система MATLAB была разработана фирмой Math Works, Inc. как язык программирования высокого уровня для математических, инженерных, научных и технических вычислений. В процессе развития система “обрастала” различными дополнениями в виде пакетов расширения, с увеличением количества которых росли и возможности системы. Но также несколько увеличилась сложность ее освоения на первых этапах, что несколько компенсируется развитой системой помощи (на английском языке).
Как и всякая компьютерная программа, система MATLAB обладает как достоинствами, так и недостатками. Достоинства системы очевидны и частично описаны выше, лишь необходимо отметить легкость написания программ в данной системе и открытость ее архитектуры, что позволяет легко изменять систему “под себя” и создавать новые пакеты расширений. К недостаткам системы можно отнести: линейную запись выражений и формул, что по сравнению, например, с системой Mathcad выглядит несколько неудобочитаемым; некоторую громоздкость системы, что создает сложности в ее изучении на первых этапах.
В данный момент существует довольно большое количество литературы, посвященной системе MATLAB и ее приложениям, но даже вся эта литература не может охватить все возможности и способности этого программного продукта. В частности, недостаточно освещен вопрос о применении системы MATLAB (а точнее, пакета расширения Simulink) для решения задач анализа и синтеза систем автоматического управления (САУ). Поскольку данное учебное пособие посвящено исключительно этому во-
6

просу, в нем будет использоваться только пакет расширения Simulink и работа непосредственно с системой MATLAB описываться не будет. Но так как пакет расширения Simulink не может функционировать без системы MATLAB, в следующем подразделе даны краткие рекомендации по пользованию системой MATLAB.
Также необходимо отметить, что данное учебное пособие ориентировано на использование версии MATLAB 6.0 Release 12 и версии Simulink
4.0(далее в тексте - без номера версии).
Вопросы установки системы MATLAB также опускаются. Предполагается, что MATLAB используется в операционной системе
Windows 95 OSR2, Windows 98 или Windows 98 OSR2. Запуск системы
MATLAB 6.0 производится из главного меню операционной системы либо двойным щелчком левой кнопки мыши на иконке MATLAB на рабочем столе.
После запуска появляется основное окно системы MATLAB. Это обычное окно приложений Windows, его можно перемещать, изменять его размер, открывать на весь экран и т. д.
1.2. Пользовательский интерфейс MATLAB
Интерфейс MATLAB 6.0 использует все возможности операционной системы Windows, следовательно, все окна, появляющиеся во время работы системы, можно перемещать, изменять их размеры, открывать на весь экран, сворачивать и закрывать.
После запуска системы появляется основное окно MATLAB (рис.1.1), которое состоит из пяти частей:
1– командное меню;
2– панель инструментов;
3– панель запуска компонентов системы (Launch Pad) и браузер (редактор) рабочего пространства (Workspace);
4– окно истории сессии1 (Command History) и браузер текущей директо-
рии (Current directory);
5– командное окно (Command Window).
1 Сессией здесь называется сеанс работы в системе MATLAB в прямом режиме ввода команд
7

1
2
5
3
4
Рис.1.1. Основное окно системы MATLAB
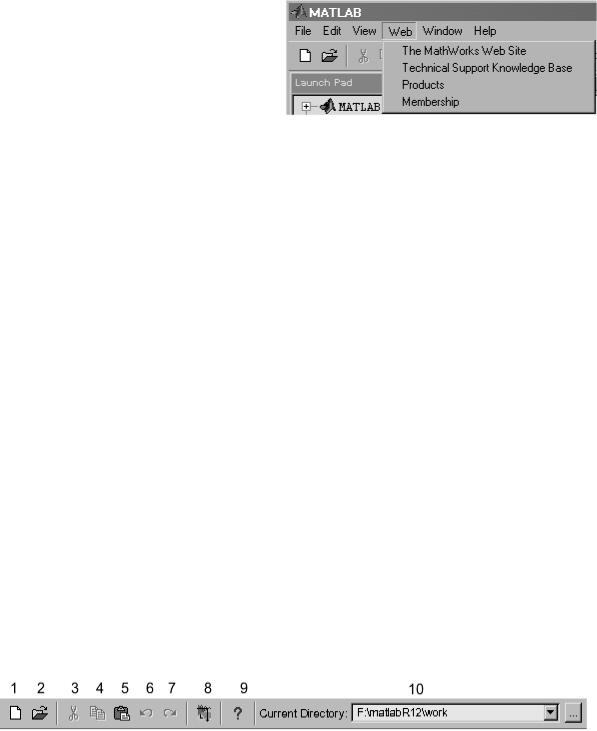
1.2.1. Командное меню
Командное меню (рис.1.2) предназначено для управления и настройки системы и содержит следующие пункты:
File – операции открытия нового файла, загрузки, сохранения и печати файлов, стандартные для операционной системы Windows;
Edit – операции редактирования сессии и работы с буфером обмена (команды Cut, Copy и Paste), стандартные для операционной системы
Windows;
View – управление внешним видом окон MATLAB;
Web – доступ к интернет-ресурсам;
Window – переключение между открытыми окнами MATLAB;
Help – доступ к справочной системе и демонстрационным примерам
MATLAB.
Рис.1.2. Командное меню системы
MATLAB
8
Стандартный способ открытия меню мышью - это выбор пункта меню и щелчок по нему левой кнопки мыши. Кроме того, для открытия какойлибо позиции главного меню можно воспользоваться “горячими клавишами” – при нажатой клавише Alt нажать клавишу символа, подчеркнутого в названии позиции. Например, чтобы открыть позицию Window, надо, удерживая клавишу Alt, нажать клавишу W.
Рис.1.3. Подменю командного меню сис-
темы MATLAB
Открытая позиция главного меню выглядит как подменю (рис.1.3), содержащее различные операции и команды. Выделенная команда или операция исполняется при нажатии клавиши Enter. Выполнение команды можно также осуществить двойным щелчком мыши.
1.2.2. Панель инструментов
Панель инструментов (рис.1.4) системы MATLAB предназначена для быстрого доступа к основным функциям интерфейса, что осуществляется с помощью кнопок, выполняющих следующие функции:
1– New M-file - выводит пустое окно редактора m-файлов;
2– Open file - открывает окно для загрузки m-файла;
3–Cut- вырезает выделенныйфрагмент ипомещает его вбуфер обмена;
4– Сору - копирует выделенный фрагмент в буфер;
5– Paste - вставляет фрагмент из буфера в текущую строку ввода;
6– Undo - отменяет предшествующую операцию;
7– Redo - восстанавливает последнюю отмененную операцию;
8– Simulink - открывает окно браузера библиотек Simulink;
9– Help - открывает окно справки;
10– Current Directory - выбор рабочего каталога системы.
Оназначении кнопок говорят и всплывающие подсказки, появляющиеся, когда стрелка мыши устанавливается и некоторое время удерживается на соответствующей кнопке.
Рис.1.4. Панель инструментов системы MATLAB
9
Наиболее важной кнопкой (для целей данного учебного пособия) является кнопка открытия окна браузера библиотек Simulink (см. рис.1.4,
поз.8).
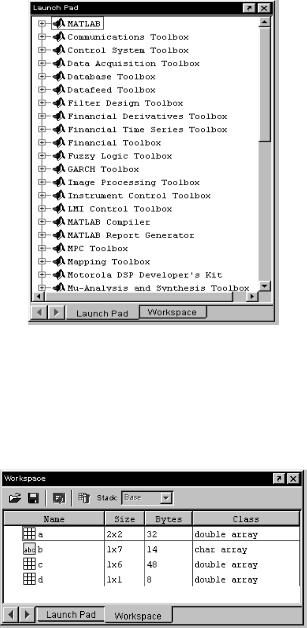
1.2.3. Панель запуска компонентов системы и браузер рабочего пространства
Панель запуска (рис.1.5) предназначена для быстрого доступа к компонентам системы MATLAB (в том числе и к Simulink) и к их описаниям, а также к ссылкам Internet.
Рис.1.5. Панель запуска компонентов системы MATLAB
Браузер рабочего пространства (рис.1.6) предназначен для удобного просмотра хранящихся в оперативной памяти переменных, используемых системой при своей работе (пакет расширения Simulink также создает переменные в рабочей области).
Рис.1.6. Браузер рабочего пространства системы MATLAB
10