

1760
.pdfРис.6.24. Пример настройки корректирующего звена
Рис.6.25. Переходный процесс замкнутой синтезируемой системы
Таким образом, с настройками регулятора kтп = 0,5 и Tтп = 0,035 с
111
САРЧ полностью удовлетворяет требуемым показателям устойчивости и качества. Можно попробовать уменьшить время переходного процесса, изменяя постоянную времени терристорного преобразователя, с помощью перемещения красного крестика (полюса регулятора) таким образом, чтобы наклон логарифмической фазовой характеристики уменьшался (увеличивалось значение частоты фазового сдвига). При этом увеличивается запас устойчивости по амплитуде, что позволяет увеличить коэффициент усиления регулятора.
Для примера, при настройках регулятора kтп = 0,85 и Tтп = 0,00145:
-запас устойчивости по амплитуде L = 20,1 дБ;
-запас устойчивости по фазе = 68,6 градусов;
-статическая ошибка ст = 0%;
-перерегулирование = 0,944%;
-время переходного процесса tp = 1,21 с.
Можно попробовать еще улучшить показатели качества, но следует не забывать, что настройки регулятора лежат в пределах: коэффициент усиления терристорного преобразователя – от 0,1 до 10, а постоянная времени терристорного преобразователя – от 0,001 до 0,01.
Необходимо заметить, что при любом изменении параметров корректирующего звена изменяется и график переходного процесса (если окно активно).
6.4.5. Синтез по возмущающему воздействию
Синтез по возмущающему воздействию будет заключаться в добавке в структурную схему синтезируемой системы управления по возмущению. Структурная схема САРЧ, с учетом возмущающего воздействия (изменения момента нагрузки на валу ДВС), но без управления по возмущению представлена на рис.6.26, где ОУ’ – передаточная функция объекта управления по возмущающему воздействию.
По графику переходного процесса по возмущающему воздействию (рис.6.27) определены следующие показатели влияния возмущения на частоту вращения ДВС:
-максимальный заброс частоты вращения ymax = -0,0377;
-статическая ошибка по возмущению вст = 0%;
-время переходного процесса по возмущению tвпп = 1,37 с.
Для определения изменения момента нагрузки можно воспользоваться магнитоупругим датчиком момента, передаточная функция которого при малых изменениях момента нагрузки может быть принята равной единице:
Wдм(s) = kдм = 1. |
(6.13) |
112

Рис.6.26. Структурная схема САРЧ без управления по возмущению
Согласно (6.11), передаточная функция управляющего устройства (регулятора) по возмущению
Wуу’(s) = 0,002951 s2 + 0,0227 s. |
(6.14) |
Рис.6.27. Переходный процесс по возмущающему воздействию без управления по возмущению
113

Таким образом, для того чтобы обеспечить независимость выходной величины от возмущения, необходимо ввести дополнительное управляющее воздействие в функции второй и первой производных (6.14). Структурная схема системы с таким управлением по возмущению представлена на рис.6.28.
Рис.6.28. Структурная схема САРЧ с управлением по возмущению
Причем регулятор по возмущению РВ для удобства собран в блокеподмодели (рис.6.29).
Рис.6.29. Структурная схема регулятора по возмущению
Переходный процесс в системе по возмущающему воздействию с управлением по возмущению (рис.6.30) представляет собой прямую линию на нулевом уровне, что говорит о независимости выходного сигнала (частоты вращения вала ДВС) от возмущения (небольших изменений момента нагрузки).
114

Рис.6.30. Переходный процесс по возмущающему воздействию с управлением по возмущению
Небольшой скачок (ymax = −8,11 10-5) в начале переходного процесса обусловлен неточностью воспроизведения пакетом Simulink дифференцирующего звена.
Дифференцирование второго порядка (ускорение изменения сигнала) достаточно трудно осуществить физически, поэтому для упрощения можно отбросить член второго порядка, тогда управляющее устройство будет
иметь передаточную функцию: |
|
Wуу’(s) = 0,0227 s. |
(6.15) |
Структурная схема регулятора по возмущению в этом случае будет выглядеть так, как это показано на рис.6.31, и переходный процесс по возмущающему воздействию, как это показано на рис.6.32.
Рис.6.31. Структурная схема регулятора по возмущению
115

Рис.6.32. Переходный процесс от возмущающего воздействия, с управлением по возмущению
В этом случае возмущающее воздействие влияет на частоту вращения ДВС следующим образом:
-максимальный заброс частоты вращения ymax = −0,0177;
-статическая ошибка по возмущению вст = 0%;
-время переходного процесса по возмущению tвпп = 1,64 с.
Таким образом, несмотря на то, что увеличилось время переходного процесса по возмущению, заброс регулируемой величины от возмущающего воздействия уменьшился в 2,12 раза.
116
7. АНАЛИЗ ПРОСТЕЙШИХ СТРУКТУР ПРИ СЛУЧАЙНЫХ ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИЯХ
7.1. Понятие случайной величины и случайного процесса. Законы распределения случайных величин
Случайной величиной называется такая переменная, которая в результате испытаний принимает то или иное заранее непредсказуемое значение. Для количественного описания случайной величины необходимо задать область ее существования и способ количественного определения вероятности попадания величины в произвольную часть области существования, то есть установить связь между значением случайной величины и вероятностью появления этого значения. Последнее задается с помощью закона распределения случайной величины. Законы распределения могут быть дискретными и непрерывными.
Случайным процессом (случайной функцией) называется случайная величина, зависящая от времени. Случайный процесс описывается случайной функцией, мгновенные значения которой в любые дискретные моменты времени являются случайными величинами. Полной характеристикой случайного процесса является закон распределения. Однако в большинстве случаев достаточно указать некоторые числовые характеристики закона распределения: математическое ожидание, дисперсия, асимметрия, эксцесс. Перечисленные характеристики имеют физический смысл: математическое ожидание определяет среднее значение случайной величины; дисперсия является характеристикой разброса случайной величины относительно среднего значения; асимметрия характеризует симметричность кривой дифференциальной функции распределения относительно среднего значения; эксцесс дает возможность сравнивать вершину кривой с нормальным законом распределения.
В системе MATLAB случайные процессы представлены двумя блоками: Uniform Random Number - источник случайного сигнала с равномерным распределением и Random Number - источник случайного сигнала с нормальным распределением. Оба блока находятся в разделе Sources биб-
лиотеки Simulink.
Блок Uniform Random Number описывается следующим выражением:
|
1 |
, |
|
|
|
|
|
если М < x < S; |
|
|
|
|||
f(x) S M |
(7.1) |
|||
|
|
|
в противном случае, |
|
0, |
|
|
||
где М − минимальное значение уровня сигнала;S – максимальное значение уровня сигнала.
117

В параметрах блока Uniform Random Number (рис. 7.1) указываются значения минимального и максимального уровней сигнала (Minimum и Maximum), время дискретизации (Sample time), стартовое значение для генератора случайных чисел (Initial seed).
Рис.7.1. Блок Uniform Random Number
Рис.7.2. Блок Random Number
118

Блок Random Number описывается аналитическим выражением:
f(x) 1 |
(x M)2 |
|
|
e 2S2 |
, |
(7.2) |
 2 S
2 S
где М − математическое ожидание; S2 − дисперсия.
В параметрах блока Random Number (рис.7.2) указывается математическое ожидание (Mean), дисперсия (Variance), время дискретизации (Sample time), стартовое значение для генератора случайных чисел (Initial seed). Стартовое значение определяет вариант реализации выборки случайных чисел, для одного и того же числа в этой опции получается одна и та же выборка.
Генератор белого шума - Band Limited White Noise - служит для создания шумового сигнала с заданной мощностью, равномерно распределенной по частоте.
7.2. Прохождение случайного сигнала через линейную систему
Для примера возьмем систему автоматического регулирования частоты (САРЧ) вращения вала дизеля без управления по возмущению (см. рис.6.26) и в качестве возмущающего воздействия используем нормально распределенный сигнал (блок Random Number) с параметрами: математическое ожидание Mean = 0,5; дисперсия Variance = 0,01; стартовое значение Initial seed = 0 и время дискретизации Sample time = 0 (непрерывный сигнал). Кроме того, необходимо добавить регистрирующие блоки, передающие информацию в рабочую область (блок To Workspace). Структурная схема показана на рис. 7.3.
Рис.7.3. Структурная схема системы стабилизации угловой скорости турбогенератора со случайным возмущающим воздействием
119
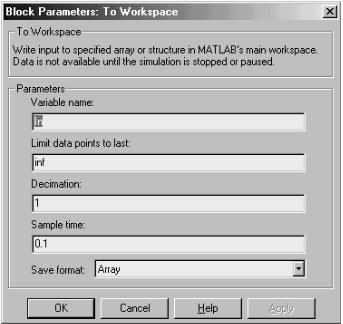
Блок To Workspace служит для регистрации случайного сигнала, подаваемого на вход системы, а блок To Workspace1 – для регистрации выходного сигнала. Блок To Workspace имеет следующие параметры (рис.7.4):
1)Variable name – имя переменной, в которой будут сохраняться результаты;
2)Limit data points to last – предел количества точек запоминаемой величины (inf – бесконечное число точек);
3)Decimation – разрядность хранимой величины;
4)Sample time – шаг времени, через который происходит сохранение значений;
5)Save format – формат, в котором происходит сохранение, может быть: Structure with time – структура с временем; Structure – структура, Array – массив.
Рис.7.4. Настройка блока To Workspace
В параметрах обоих блоков устанавливаем: Sample time = 0,1 и Save format – Array, параметры Limit data points to last и Decimation оставляем без изменений. Имена переменных: для входного блока – In, а для выходного – Out, при этом имена переменных появляются на изображении блока на схеме (см. рис.7.3).
Время моделирования устанавливаем (в меню окна модели Simulation > Simulation Parameters… > Stop time), равным 50 с, этого достаточно, чтобы определить характеристики случайного сигнала.
Далее необходимо запустить процесс моделирования (в меню окна модели Simulation > Start) и выполнить следующие действия:
120