

1760
.pdf1.2.4.Окно истории сессии и браузер текущей директории
Вокне истории сессии (рис.1.7) отображаются все команды, выполненные при предыдущих запусках системы, которые хранятся до перезагрузки компьютера. При необходимости сессию можно сохранить.
Рис.1.7. Окно истории сессии системы MATLAB
Рис.1.8. Браузер текущей директории системы MATLAB
Браузер текущей директории (рис.1.8) отображает содержимое текущей директории (рабочего каталога) системы (см. рис.1.4, поз.10), а также указывает тип файла и время его последнего изменения.
11
2. ПАКЕТ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ
СИСТЕМ SIMULINK
2.1. Назначение и функции пакета Simulink
Версия системы MATLAB 6.0 поставляется вместе с пакетом расширения Simulink 4.0, предназначенным для моделирования динамических систем, модели которых составляются из отдельных блоков (компонентов).
В этом пакете реализованы принципы визуально-ориентированного программирования, что позволяет легко набирать нужные блоки и соединять их с целью составления модели системы или устройства. При этом сложнейшие уравнения состояния, описывающие работу моделей систем или устройств, формируются автоматически без участия пользователя, что значительно облегчает и ускоряет его работу.
По удобству графического пользовательского интерфейса, обилию моделей (блоков) компонентов во множестве библиотек, разнообразию виртуальных средств регистрации и визуализации результатов моделирования и, главное, по его надежности и достоверности Simulink 4.0 выгодно отличается от множества подобных программ. Особенно это относится к открытости пакета и возможностям пополнения его библиотек.
Пакет Simulink является ядром интерактивного программного комплекса, предназначенного для математического моделирования линейных и нелинейных динамических систем и устройств, представленных своей функциональной блок-схемой, именуемой S-моделью, или просто моделью. При этом возможны различные варианты моделирования: во временной области, в частотной области, с событийным управлением, на основе спектральных преобразований Фурье, с использованием метода МонтеКарло (реакция на воздействия случайного характера) и т. д.
Для построения функциональной блок-схемы моделируемых устройств Simulink имеет обширную библиотеку блочных компонентов и удобный редактор блок-схем. Используя палитры компонентов (наборы), пользователь с помощью мыши переносит нужные блоки с палитр на рабочий стол пакета Simulink и соединяет линиями входы и выходы блоков. Таким образом, создается блок-схема системы или устройства, то есть модель.
Simulink автоматизирует следующий, наиболее трудоемкий этап моделирования: он составляет и решает сложные системы алгебраических и дифференциальных уравнений, описывающих заданную функциональную схему (модель), обеспечивая удобный и наглядный визуальный контроль за поведением созданного пользователем виртуального устройства. Пользователю достаточно уточнить (если нужно) вид анализа и запустить Simulink в режиме симуляции (откуда и название пакета - Simulink) созданной модели системы или устройства.
12

Для запуска пакета Simulink необходимо нажать кнопку Simulink в панели инструментов главного окна системы MATLAB (см. рис.1.4, поз.8). При нажатии этой кнопки открывается окно браузера библиотек (рис.2.1).
1
2 |
|
3 |
|
4 |
5 |
6
Рис.2.1. Окно браузера библиотек пакета Simulink
В окне браузера содержится дерево компонентов библиотек Simulink. Для просмотра того или иного раздела библиотеки достаточно выделить его нажатием левой кнопки мыши, и в правой части окна Simulink Browser Library появится набор пиктограмм компонентов активного раздела библиотеки.
Окно браузера библиотек состоит из пяти основных частей: 1 – командное меню; 2 – панель инструментов;
3 – поле информационных сообщений;
4 – окно разделов библиотеки;
13
5 – окно с входящими в эти разделы подразделами или блоками; 6 – строка состояния.
2.1.1. Командное меню браузера библиотек
Командное меню содержит следующие пункты и подпункты: 1)File - работа с файлами библиотек:
New – создание новой модели или нового раздела библиотеки, куда могут входить как новые, так и уже существующие блоки;
Open – открытие файла (окна) модели или нового раздела библиотеки;Preferences – редактирование свойств пакета Simulink.
2) Edit - добавление компонентов и их поиск:
Add to the current model – добавить выделенный блок в текущее окно модели;
Find block – найти блок в библиотеке пакета Simulink;
Find next block – продолжить поиск (по критерию из предыдущего пункта меню).
3) View - управление элементами браузера библиотек Simulink:
Toolbar – показать/убрать панель инструментов;
Status bar – показать/убрать строку состояния;
Description - показать/убрать поле информационных сообщений;
Stay on top – включить/выключить режим браузера "поверх всех окон";
Collapse entire Browser – свернуть все разделы библиотек в окне разделов браузера библиотек;
Expand entire Browser – развернуть все разделы библиотек в окне разделов браузера библиотек;
Large/Small Icon – устанавливает размер иконок (большой/маленький) в окне, показывающем содержание разделов библиотек;
Show parameters for selected block – показать параметры для выбранного блока (эквивалентно двукратному нажатию на нем левой кнопкой мышки). 4) Help - вывод справки по Simulink:
Help on the selected block – справка по выбранному блоку;
Simulink Help – справка по системе Simulink;
Tip of the Day – выводит следующую подсказку в поле информационных сообщений.
14
2.1.2. Панель инструментов браузера библиотек Simulink
Панель инструментов (рис.2.2) содержит следующие кнопки:
1– Create a new model - открывает новое окно для создания модели;
2– Open a model - открывает существующую модель;
3– Stay on top - установка статуса окна браузера "поверх всех окон";
4– Find block - найти блок.
Рис.2.2. Панель инструментов браузера библиотек Simulink
В поле информационных сообщений возникает название и краткое описание выделенного раздела или блока.
Если в окне разделов библиотек выделен какой-то раздел, то щелчок правой кнопкой мыши выводит контекстное меню с одной командой, позволяющей вывести данный раздел в окне, расположенном справа от окна разделов, такой же эффект достигается двукратным нажатием левой кнопки мыши на нужном разделе.
На рис. 2.1 выделена основная библиотека Simulink (в левом окне) и показаны ее разделы (в правом окне). Основная библиотека Simulink содержит достаточно большое количество самых разнообразных блоков, в рамках данного учебного пособия нужны лишь некоторые из них, применяемые в теории автоматического управления (ТАУ).
Кроме того, при нажатии правой кнопки мыши на конкретном блоке выводится небольшое контекстное меню, содержащее следующие команды:
1)Add to the current model – добавить выделенный блок в текущую модель (также можно использовать сочетание клавиш Ctrl+I);
2)Help for the ‘block name’ block – справка по выделенному блоку (в ка-
вычках содержится имя выделенного блока);
3)Go up a level – перейти в библиотеке на уровень выше;
4)Block parameters – параметры выделенного блока (достигается так же, двукратным нажатием левой кнопки мыши на блоке).
15

2.2.Блоки библиотеки Simulink
2.2.1.Continuous – раздел непрерывных блоков
Рис. 2.3. Раздел Continuous
Всостав раздела непрерывных блоков входят (рис 2.3):
Derivative – дифференцирующий блок;
Integrator – интегрирующий блок;
Transport Delay – блок постоянного запаздывания;
Transfer Fcn – блок, реализующий передаточную функцию, заданную в виде отношения полиномов (апериодическое и колебательное звенья);
State-Space – линейная аналоговая система, заданная в виде уравнений состояния, т. е. в виде системы уравнений, представленной в форме Коши;
Zero-Pole – линейная аналоговая система, заданная своими нулями и полюсами;
Memore – блок памяти, выполняющий задержку на один шаг модельного времени;
Variable Transport Delay – блок памяти с переменной задержкой.
2.2.2.Discrete – раздел дискретных блоков
Discrete Transfer Fcn - блок, реализующий передаточную функцию, заданную в виде отношения полиномов (апериодическое и колебательное звенья), для дискретных САУ;
Discrete Time Integrator – интегрирующий блок для дискретных САУ. Выполняет численное интегрирование входного сигнала;
Zero-Order-Hold –экстраполятор нулевого порядка;
Unit Delay – блок задержки сигнала. Обеспечивает задержку входного сигнала на заданное число шагов модельного времени;
Discrete State-Spase – блок задания дискретного звена матрицами его состояния;
16
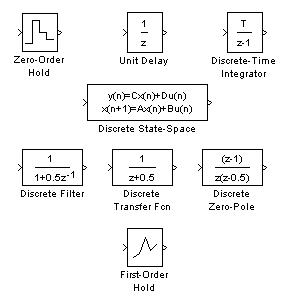
Рис. 2.4. Раздел Discrete
Discrete Filter – блок задания дискретного звена через дискретную передаточную дробно-рациональную функцию относительно 1/Z;
Discrete Zero-Pole – блок задания дискретного звена через указание значений нулей и полюсов дискретной передаточной функции относительно
1/Z;
First-Order Hold – экстраполятор первого порядка.
2.2.3.Function & Tables – раздел блоков функций и таблиц
Fcn – блок, реализующий в пакете Simulink любую функцию системы MATLAB, где в качестве параметра настройки можно ввести любое вычисляемое выражение, аргументом которого выступает входной сигнал;
MATLAB Fcn – подобен предыдущему блоку, но также позволяет реализовывать m-функции (программы, написанные на языке программирования
MATLAB);
Look-Up Table, (2-D) и (n-D) – блоки данных, заданных в виде таблиц (позволяют задать нелинейные блоки любого вида), отличаются друг от друга размерностью задающих таблиц. Все эти блоки выполняют различного вида интерполяции.
2.2.4.Math – раздел математических блоков
Gain – усилительный блок;
Sum – сумматор сигналов с различными знаками и любым количеством входов;
17

Product – вычислитель, формирующий на выходе результат умножения или деления двух и более входных сигналов. В качестве параметров настройки указывается число входов и вид выполняемой операции;
Dot Product – звено, осуществляющее перемножение двух входных величин, если они являются скалярами. Это звено вычисляет также сумму поэлементных произведений двух входных векторов одинаковой длины;
Slider Gain – аналоговый усилитель с интерактивной настройкой;
Matrix Gain – усилитель, на вход которого подается вектор;
Mat Function – блок, позволяющий выбрать одну из математических функций в поле настройки и включить ее в модель;
Trigonometric Function – звено формирования тригонометрических функций от входного сигнала. Выбор функции обеспечивается в поле настройки;
Рис. 2.5. Раздел Math
MinMax – блок выбирает минимальное или максимальное значение вектора в соответствии с заданием поля настройки. Входной сигнал на блок задается числовым вектором. В окне настройки определяется также количество входов;
18

Abs – блок, формирующий на выходе абсолютное значение входного сигнала;
Sign – блок-реле, реагирующий на знак входного сигнала;
Rounding Function – округление входного сигнала;
Combinatorial Logic – блок обеспечивает преобразование входного сигнала в соответствии с формированной в окне настройки таблицей истинности;
Logical Operation? Relaition Operator – блоки производят известные ло-
гические операции «и» и «или», количество входов задается в поле настройки;
Bitwise Logical Operator – универсальный блок, реализующий любую логическую функцию;
Complex to Magnitude-Angle – блок, позволяющий выделить модуль и фазу входной комплексной величины;
Magnitude-Angle to Complex – блок, преобразующий входную величину, заданную модулем и фазой в комплексную выходную величину;
Complex to Real-Image, Real-Image to Complex – блоки, преобразующие комплексные величины из показательной формы в алгебраическую и обратно;
Algebraic Constrain – блок, позволяющий в структурную модель включать систему алгебраических уравнений.
2.2.5.Nonlinear – раздел нелинейных блоков
Рис. 2.6. Раздел Nonlinear
Saturation – блок ограничения;
Dead Zone – блок с зоной нечувствительности;
Relay – релейный блок;
19
Rate Limiter – блок с ограничением скорости;
Coulomb and Viscous Friction – блок фрикционных эффектов;
Backlash – блок люфта;
Switch и Multiport Switch – переключатели одно- и многовходовые;
Quantizer – блок, обеспечивающий квантование входного сигнала по уровню. В системах управления такие блоки являются частью аналогоцифрового преобразователя;
Manual Switch – блок, который переключается вручную. В процессе моделирования при помощи этого ключа удобно менять параметры и структуру модели;
Coulumb & Viscous Friction – блок, реализующий характеристику трения в механических системах.
2.2.6.Signal & Systems – раздел блоков сигналов и систем
Sub System – блок-подсистема (полезен в случае громоздких систем, части которых можно с помощью данного блока заменить на один или несколько блоков-подсистем);
In, Out – блоки входа/выхода, предназначенные для создания блоковподсистем;
Mux – микшер сигналов, собирающий несколько сигналов в одну шину;
Demux – блок, выполняющий действие, обратное действию предыдущего блока;
Enable, Trigger – блоки, предназначенные для логического управления работой модели;
Bus Selector – блок выделяет из присоединенной к его порту шины требуемые сигналы. В окне настройки блока имеется два списка – входной и выходной;
Selector – блок выбирает из входного вектора элементы, которые указаны в параметрах настройки;
Merge – блок, осуществляющий объединение входных сигналов;
Matrix Concatenation – блок, позволяющий векторный сигнал, представленный развернутой строкой или столбцом, преобразовать к «свернутому» векторному сигналу;
From, Goto Tag Visibility, Goto – блоки ( «Принять», «Признак видимо-
сти», «Передать» ) используются совместно и предназначены для обмена между различными данными модели с учетом их доступности;
Data Store Memory, Data Store Read, Data Store Write – «Память», «Чте-
ние» и «Запись» данных, также используются совместно и обеспечивают хранение и передачу данных;
Ground, Terminator – блоки используются в качестве «заглушек» для не-
20