

Линейная алгебра
Загрузка пакета >with(linalg):
Задание вектора
1) координатами >a: =vector([2,3,4]);a: = [2,3,4]
2) некоторыми первыми координатами с указанием размерности вектора
>b: = vector(4,[2,3]); b: = [2, 3, b3, b4]
Незаданные координаты b3 ,b4 можно в дальнейшем вычислять или задавать
>b[3]:=2^3+4:b[4]:=2^5–1:
>print(b); вывести на экран векторb[2, 3, 12, 31] .
3) Задание нулевого вектора >a:=vector(5,0);a:=[0,0,0,0,0].
4) Задание координат как функций от номера >a:=vector(3,x–>f(x));a:=[f(1),f(2),f(3)].
(аргумент функции можно обозначать любой буквой).
Функцию можно задавать заранее:
>f:=n–>n^3;
>b:=vector(4, f); b:=[1, 8, 27, 64]
или
>h:=n–>diff(x^5,x$n); (вMAPLE 11 можно писатьh:=n–> (x5)(n) )
>u:=vector(3, h); u:=[5x4, 20x3, 60x2] .
Примечание. n -ю координату вектора «а» можно вывести на экран командой >a[n];
Полностью любой вектор «а» выводится на экран командой >print(a);
Задание матрицы.
1) строками
>A:=matrix([[1,2,3],[4,5,6]]);
 .
.
2) задать число строк (= 3) и число столбцов (= 2), а затем в квадратных скобках записывать через запятую элементы матрицы как строчки в книге
>A:=matrix(3,2,[1,2,3,4,5,6]);
 .
.
3) нулевая матрица, содержащая m строк и n столбцов, задается командой >A:=matrix(m,n,0);
4) единичная матрица n n задается командой >Е:=array(1..n,1..n,identity);
5) матрица может быть задана функцией от номера строки mи номера столбцаn
>F:=(m,n)–> 10*m+n:
>A:=matrix(2,3,F);
 .
.
Примечание.Для произвольной матрицы А можно вывести на экран командами
>A[m,n]; элементm-й строки иn-го столбца,
>row(A,n); полностьюn-ю строку,
>col(A,n); пполностьюn-й столбец .
Полностью матрица Aвыводится на экран командой >print(A);
Основные задачи линейной алгебры
ВЕКТОРЫ
1) Линейные операции над векторами, задаваемыми без слова vector, можно производить без подгрузки пакетаlinalg.
>a:=[1,2,3]; >b:=[1,1,1];
>c:=2*a–3*b; Ответ: c:=[–1,1,3]
Для линейных операций над векторами a:=vector([1,2,3]); >b:=vector([1,1,1]); следует подгрузить пакетlinalgи выполнять линейные операции с использованием команды оцениванияevalm
>c:=2*a–3*b; Ответ:c:=2a–3b– отложенная команда
>evalm(c); Ответ: [–1,1,3] – вычисление линейной комбинации.
2) Скалярное произведение двух векторов а иb
>dotprod(a,b);
Здесь векторы могут задаваться в форме >b:=[b1,b2,b3] , без словаvector.
3) Нахождение угла между векторами а иb
>angle(a,b);
Здесь векторы могут задаваться в форме >b:=[b1,b2,b3] , без словаvector.
4) Векторное произведение двух векторов а иb
>crossprod(a,b);
Здесь векторы могут задаваться в форме >b:=[b1,b2,b3] , без словаvector.
5) Нахождение базиса для произвольной системы векторов {a,b,c,d}
>basis({a,b,c,d});
6) Ортогонализация системы {a,b,c,d} линейно независимых векторов
>GramSchmidt({a,b,c,d}); [e1,e2,e3,e4] – система ортогональных векторов.
7) Норма вектора и его нормализация (координаты вектора делятся на его длину)
>a:=[3, 4];a:=[3, 4] задание вектора (можно без словаvector)
>norm(a,2); 5 – норма (длина) вектора
>normalize(a); нормализация вектора, ответ: [3/5 , 4/5] .
МАТРИЦЫ
1) Линейная комбинация заданных матриц А и В
>evalm(2*A–3*B); Примечание: А+5 вычисляется как А+5*Е
Умножение матриц подходящих размеров
>evalm(A&*B);
Деление на невырожденную матрицу В (умножение справа на В–1)
>evalm(A/B); Примечание: команда >evalm(1/B); вычисляет В–1.
Рекомендация. Удобно сначала провести все выкладки с матрицами без команды оценивания, а затем выполнить команду оценивания >evalm(…); Например:
>((2*A+3)&*B)/C; (при делении ставить скобки!)
>evalm(%);
2) Вычисление определителя квадратной матрицы А >det(A);
3) Транспонирование матрицы А >transpose(A);
4) Для данной квадратной матрицы А вычисляется присоединенная матрица В (т.е. транспонированная матрица из алгебраических дополнений)
>B:=adj(A);
5) Вычисление обратной матрицы для квадратной матрицы А , если det(A)0
>inverse(A);
6) Элементарное преобразование матрицы A: поменять местамиm-йи n-йстолбцы
>swapcol(A,m,n);
Аналогичная операция со строками осуществляется командой >swaprow(A,m,n);
7) Элементарное преобразование матрицы A: Умножениеn-го столбца на числох
>mulcol(A,n,x);
Аналогичная операция со строкой производится командой >mulrow(A,n,x);
8) Элементарное преобразование матрицы A: столбец с номеромm умножается на числох и прибавляется к столбцу с номеромn
>addcol(A, m, n, x);
Аналогичную операцию со строками производит команда >addrow(A,m,n,x);
9) В матрице А выбирается ненулевой элемент A[m,n] и во всех строках над ним и под ним делаются нули при помощи элементарных преобразований
>pivot(A,m,n);
10) Вычеркивание из матрицы А столбцов с номерами от m доn
>delcols(A,m..n);
Если m=n, то удаляется только один столбец. Аналогичная команда для строк имеет вид
>delrows(A,m..n);
11) Приведение матрицы А к ступенчатому виду
>A:=matrix(3,
3, [9,8,7,6,5,4,3,2,1]);
 задание матрицы.
задание матрицы.
>gausselim(A);
 (в ответе возможны дроби).
(в ответе возможны дроби).
>ffgausselim(A);
 (в ответе дроби отсутствуют).
(в ответе дроби отсутствуют).
>gaussjord(A);
 приведение матрицы к главному
ступенчатому виду.
приведение матрицы к главному
ступенчатому виду.
12) Ранг матрицы А >rank(A);
13) Нахождение характеристического многочлена для квадратной матрицы А
>P:=charpoly(A,lambda); (вместоможно употребить любую другую букву). Команда вычисляет характеристический многочлен матрицы А.
Собственные числа матрицы А (корни этого характеристического многочлена) находятся затем командой
>solve(P,lambda);
14) Вычисление собственных значений матрицы А >eigenvals(A);
Ответ записывается в точном виде, если элементы матрицы заданы точно. Если же элементы матрицы заданы в десятичном виде, то собственные значения будут вычисляться приближенно.
15) Вычисление собственных значений (с указанием кратности) и соответствующих собственных векторов
>A:=matrix(2, 2, [5,4,3,9]): задание матрицы А
>eigenvects(A); [3, 1, {[–2, 1]}] , [11, 1, {[1, 3/2]}] .
Здесь 3 – собственное значение , 1 – его кратность, [–2, 1] – собственный вектор.
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
1) По данной системе Sсформировать матрицу системы и расширенную матрицу системы
>S:=[2*x+3*y+4*z+5*t=6, x+y+z+t+a, x–y+z–t]; задание системы. Отсутствие знака = означает равенство выражения нулю, квадратные скобки можно заменить фигурными
>V:=[x,y,z,t]; список (list) неизвестных.
>genmatrix(S,V);
 матрица системы. Элементы матрицы
соответствует порядку неизвестных в
списке
матрица системы. Элементы матрицы
соответствует порядку неизвестных в
списке
>genmatrix(S,V,flag);
 расширенная матрица системы.
расширенная матрица системы.
2) По данной матрице А и неизвестным X:=[…] написать однородную систему уравнений
>A:=matrix(2,3,[1,2,3,4,5,6]); >X:=[u,v,w]; Число неизвестных равно числу столбцов!
>geneqns(A,X); ответ: {u+2v+3w=0 , 4u+5v+6w=0}
Если неизвестные не задавать, то команда
>geneqns(A,z); составляет систему {z1+2z2+3z3=0 , 4z1+5z2+6z3=0}
Если задать ещё вектор b правых частей, то можно составить неоднородную систему
>b:=vector([7,8]); Число координат вектораbравно числу строк!
>geneqns(A,x,b); ответ: {4x1+5x2+6x3=8 , x1+2x2+3x3=7}
3)Нахождение общего решения (с параметрами x1,x2,x3, …) для системы линейных уравнений с заданной расширенной матрицей Аступенчатоговида
>X:=backsub(A,false,x); (вместох можно использовать другую букву)
Пример.
>A:=matrix(2,
5, [1,2,3,4,10,0,0,1,2,3]);
>P:=backsub(A,false,x); P: = [–2x2+2x1+1 , x2 , –2x1+3 , x1].
Для получения какого-нибудь частного решения нужно придать свободным неизвестным (т.е. параметрам x[1] ,x[2]) какие-нибудь значения, т.е. выполнить, например, команду
>subs(x[1]=1,x[2]=1,%); [1,1,1,1]
Тот же результат можно получить командами
>x[1]:=1:x[2]:=1: [P[n]$n=1..4]; [1,1,1,1]
4) Решение линейной системы Ax=b(здесь векторbзадается без словаvector)
>linsolve(A,b);
Если система несовместна, то нет никакого ответа. При совместности выдается решение системы в параметрическом виде, где параметры имеют неудобный вид _t1 , _t2 ,...
>A:=matrix([[1,2,3],[4,5,6],[7,8,9]]);
>b:=[6,15,24];
>linsolve(A,b); Ответ: [_t1 3–2_t1 _t1]
К сожалению, с такими параметрами нельзя использовать команду subs(...) (см. предыдущий пример) для получения частного решения. Поэтому эту команду лучше применять для случая, когда существует единственное решение системы. В данном же случае для решения системы следует использовать команду
>linsolve(A,b,’r’,u); [u13–2u1u1] общее решение с параметромu1
>subs(u[1]=2,%); [2 –1 2] частное решение
5) Матричное уравнение АХ=В решается такой же командой >linsolve(A,В);
Для решения матричного уравнения ХА=В нужно решить командой linsolveтранспонированное уравнение АТХТ=ВТ и затем транспонировать результат. Если матрицы А и В квадратные, то уравнение ХА=В решается командой >X:=evalm(B/A); а уравнение АХ=В решается командой >X:=evalm(1/A&*B);
6) Решение переопределенной системы Ах = bпо методу наименьших квадратов
>A:=matrix(3,
2, [2,3,1,1,1,–1]);
 задание матрицы А системы уравнений.
задание матрицы А системы уравнений.
>b:=[4,2,3]; задание правых частей векторомb(можно без словаvector),
>leastsqrs(A,b); нахождение решения системы, ответ: [77/30, –2/5].
ЭЛЕМЕНТЫ ТЕОРИИ ПОЛЯ
1) Вычисление ротора векторного поля
>F:=[x*y,y*z,z*x]; задание пространственного векторного поля,
>u:=[x,y,z]; задание переменных, по которым будет вычисляться ротор,
>rotF:=curl(F,u); вычисление ротора, ответ:rotF:=[–y,–z,–x].
2) Вычисление дивергенции векторного поля
>F:=[x*y,y*z,z*x]; задание пространственного векторного поля,
>u:=[x,y,z]; задание переменных, по которым будет вычисляться дивергенция,
>divF:=diverge(F,u); вычисление дивергенции, ответ:divF: =y+z+x
3) Вычисление градиента скалярной функции
>F:=x*y*z; задание скалярной функции,
>V:=[x,y,z]; задание переменных, по которым будет вычисляться градиент,
>gradF:=grad(F,V); вычисление градиента, ответ:gradF: = [yz,zx,xy].
4) Матрица Вронского от функций f(x),g(x),h(x) находится по команде
>A:=Wronskian([f(x),
g(x), h(x)],x);

Определитель Вронского вычисляется затем по команде >det(A);
5) Оператор Лапласа от данной функции F(x,y,z)по данным переменным[x,y,z]
>laplacian(F(x,y,z),[x,y,z]);
6) Якобиан от данной системы функций [ u(x,y,z) , v(x,y,z) , w(x,y,z)] по переменным[x,y,z]
>jacobian([u(x,y,z) , v(x,y,z) , w(x,y,z)] , [x,y,z]);
7) Нахождение потенциала векторного поля.
>f: = [P(x,y),Q(x,y)]; – задание векторного поля,
>potential(f, [x,y],’F’); – проверка поля на потенциальность (true,false) и вычисление
потенциала Fвекторного поляf,
>F; – вывод потенциала на экран.
Аналогичным образом находится потенциал для трехмерного поля.
>f:=[P(x,y,z),Q(x,y,z),R(x,y,z)];
>potential(f, [x,y,z], ‘F’);
>F;
ЛИНЕЙНЫЕ СТРУКТУРЫ НА ПЛОСКОСТИ
Задание точки.
Точка на плоскости задается двумя координатами в квадратных скобках
>a:=[3, 5];B1:=[–5, 2/3]; и т.д.
Названия
точек – это произвольные сочетания
букв и цифр. Запрещены названия D,I,O. Вместо
них можно писатьd,i,o. Координаты точек должны
быть рациональными или десятичными.
Запрещены координаты типа![]() ,ln(5) . Следует писать в
таких случаях
,ln(5) . Следует писать в
таких случаях![]() ,ln(5.0).
,ln(5.0).
Точка наносится на плоскость в виде кружочка командой
>PLOT(POINTS(a, B1, [2, 3]), OPTIONS);
Здесь a, В1 – ранее заданные точки, [2, 3] – точка, которая ранее не была определена.
Цвет точки определяется опцией COLOR(HUE,n), где числоп задает цвет положением на «радужной» шкале
красный оранжевый желтый зелёный голубой синий фиолетовый малиновый
n= 0.0 0.1 0.15 0.3 0.45 0.6 0.8 0.9
Примечание. Можно сначала заранее задать множество точек командой
>W:=POINTS(a,B1, [2, 3]);
а уже затем нанести их на плоскость командой
>PLOT(W);
ПРИМЕЧАНИЕ. Опции точки (цвет,форма) и других объектов можно заранее не задавать, а щелкать по объектам правой мышью и выбирать опцию из появившейся таблицы.
Ломаная линия.
Ломаная линия задается командой
>P:=CURVES([a,b,c,d]); гдеa,b,c,d– ранее заданные точки.
На плоскость ломаная линия наносится командой
>PLOT(P,OPTIONS);
В качестве опций можно рассматривать толщину линии – THICKNESS(n). Чем большеп, тем больше толщина ломаной. Наряду с опцией цветаCOLOR(HUE,n) можно определять цвет, задавая интенсивности цветов: красного (r), зеленого (g), синего (b) –COLOR(RGB,r,g,b).
Примечание. Можно сразу задать несколько ломаных
>P:=CURVES([a,b,c,d], [p,q,r,s]);
а затем построить их одной командой.
>PLOT(P,OPTIONS);
Многоугольник (замкнутая ломаная линия).
Пусть заданы точки a,b,c,d. Тогда многоугольник, образованный отрезками [a,b], [b,c], [c,d], [d,a] задается командой
>Q:=POLYGONS([a,b,c,d]);
На плоскости этот многоугольник рисуется командой
>PLOT(Q,OPTIONS);
Граница многоугольника рисуется черным цветом, толщина границы задается опцией THICKNESS(n). Опция цвета дает заливку многоугольника этим цветом, границы остаются черными.
Этот же многоугольник можно нарисовать командой
>PLOT(CURVES([a,b,c,d,a]), OPTIONS);
В этом случае опция цвета не дает заливку, а раскрашивает только границу многоугольника.
Примечание. Можно сразу задать несколько многоугольников
>Q:=POLYGONS([a,b,c], [p,q,r,]);
а затем построить их одной командой.
>PLOT(Q,OPTIONS);
Надпись в данной точке.
Текст “KANT” в точке [3, 5] задается командой
>R:=TEXT([3, 5],KANT,OPTIONS);
После этого текст наносится на плоскость командой
PLOT(R);
В качестве опций можно брать опцию цвета надписи, а также опции горизонтального и вертикального выравнивания текста:
ALIGNLEFT,ALIGNRIGHT– надпись слева или справа от точки
ALIGNABOVE,ALIGNBELOW– надпись сверху или снизу от точки.
Опции горизонтального и вертикального выравнивания можно применять одновременно
Совмещение объектов на одном рисунке.
Ранее заданные объекты P,Q,Rсовмещаются на одном рисунке командой
>PLOT(P,Q,R);
ЛИНЕЙНЫЕ СТРУКТУРЫ В ПРОСТРАНСТВЕ
Задание точки.
Точка в пространстве задается тремя координатами в квадратных скобках
>a:=[3, 5, –1];B1:=[–5, 2/3, 0]; и т.д.
Названия
точек – это произвольные сочетания
букв и цифр. Запрещены названия D,I,O. Вместо
них можно писатьd,i,o. Координаты точек должны
быть рациональными или десятичными.
Запрещены координаты типа![]() ,ln(5) . Следует писать в этом
случае
,ln(5) . Следует писать в этом
случае![]() ,ln(5.0).
,ln(5.0).
Точка наносится на плоскость в виде кружочка командой
>PLOT(POINTS(a, B1, [2, 3,5]), OPTIONS);
где a, В1 – ранее заданные точки, [2, 3, 5] – точка, которая ранее не была определена.
Отрезки определяются двумя точками.
Множество отрезков задается командой
>P:=CURVES([a,b],[c,d],[e,f]);
Затем эти отрезки строятся в пространстве командой
>PLOT3D(P,OPTIONS);
Многоугольники.
Множество многоугольников определяется командой
>Q:=POLYGONS([a,b,c],[p,q,r]);
Затем эти многоугольники строятся в пространстве командой
>PLOT3D(Q,OPTIONS);
Совмещение объектов на одном рисунке.
PLOT3D(P, Q, OPTIONS);
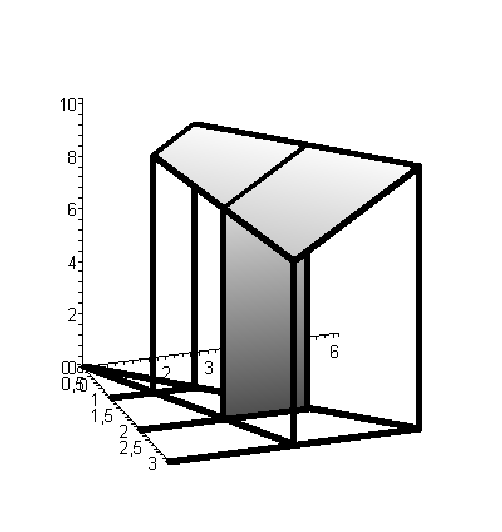
Задача. Построить плоскостьz=10 – 2x + y над областью {1 ≤ x ≤ 3 , x y 2x } и сечение соответствующей усеченной призмы плоскостьюх = 2.
> a:=[1,0,0]:b:=[2,0,0]:c:=[3,0,0]:
a1:=[1,1,0]:b1:=[2,2,0]:c1:=[3,3,0]:
a2:=[1,2,0]:b2:=[2,4,0]:c2:=[3,6,0]:
A1:=[1,1,9]:B1:=[2,2,8]:C1:=[3,3,7]:
A2:=[1,2,10]:B2:=[2,4,10]:C2:=[3,6,10]:o:=[0,0,0]:
> P:=CURVES([o,c1],[o,c2],[a,a2],[b,b2],[c,c2],
[a1,A1],[a2,A2],[c1,C1],[c2,C2]):
> Q:=POLYGONS([A1,A2,C2,C1],[b1,B1,B2,b2]):
> PLOT3D(P,Q,THICKNESS(4),COLOR(RGB,0,0,1));
plottools – пакет для изображения некоторых геометрических объектов
подгрузка пакета >with(plottools):
1. Дуга окружности с центром в точке (Xc, Yc) , радиуса R, охватывающая угол ().
>L:=arc([Xc,Yc],R,..): задание дуги.
>plots[display](L,options); изображение этой дуги
Примечание. Если произвести ещё подгрузку with(plots), то вместо последней команды можно выполнить команду
>display(L,options);
Другие объекты изображаются аналогично.
2. Окружность с центром в точке (Xc, Yc) , радиуса R.
>C:=circle([Xc,Yc],R): задание окружности.
>plots[display](C,options); изображение этой окружности
Примечание. Если произвести ещё подгрузку with(plots), то вместо последней команды можно выполнить команду
>display(С,options);
3. Конус с вершиной и точке (a,b,c), с радиусом основания R и высотой Н (возможно H<0) .
>C:=cone([a,b,c],R,H): задание конуса.
>plots[display](C,options); изображение этого конуса.
Примечание. Если произвести ещё подгрузку with(plots), то вместо последней команды можно выполнить команду
>display(С,options);
4. Отрезок между точками А(a1,a2) , B(b1,b2)
>L:=line([a1,a2] , [b1,b2]): задание отрезка.
>plots[display](L,options); изображение этого отрезка.
Примечания. а)Если произвести ещё подгрузку with(plots), то вместо последней команды можно выполнить команду
>display(L,options);
б) Если точки задаются тремя координатами, то отрезок изображается в пространстве.
5. Многоугольник ABCD
P:=polygon([[a1,a2],[b1,b2],[c1,c2],[d1,d2]]): задание многоугольника.
>plots[display](Р,options); изображение этого многоугольника.
Примечания. а)Если произвести ещё подгрузку with(plots), то вместо последней команды можно выполнить команду
>display(Р,options);
б) Если точки задаются тремя координатами, то многоугольник изображается в пространстве.
в) Опция color дает цвет заливки многоугольника.
6. Точки A(a1,a2), B(b1,b2)
>P:=point([a1,a2],options), point([b1,b2],options): задание точек. В качестве опций можно задавать
цвет (color=...) , форму точки (symbol=circle, box, diamond) , размер точки (symbolsize=30).
>plots[display](P); изображение этих точек.
Примечание. Если произвести ещё подгрузку with(plots), то вместо последней команды можно выполнить команду
>display(Р);
Если заданы несколько объектов, то они изображаются командой
>plots[display]([P,Q,L]);
Другте фигуры см. в пакете plottools.