


|
Рис. 9.3. Схема узлов «крест» |
|
||||||
|
|
|
|
|
|
|
И |
|
Схема «крест» – явная устойчивая схема (малое изменение |
||||||||
входных данных ведет к малому изменению выходных данных). |
|
|||||||
|
|
|
|
|
|
Д |
|
|
|
10. Численное интегрирование |
|
||||||
a |
|
|
|
|
А |
|
|
|
Для вычисления точного значения определенного интеграла |
||||||||
|
|
|
б |
|
|
|
||
используется формула Ньютона−Лейбница: |
|
|
||||||
b |
|
|
|
|
|
|
|
(10.1) |
I = ∫ f (x)dx |
= F(a) − F(b), |
|
|
|||||
|
и |
|
|
|
|
|||
где F(a), F(b) −первоо разные функции f (x) . |
|
|||||||
С |
|
|
ограниченное применение, т.к. не всякая |
|||||
Эта формула меет |
|
|||||||
подынтегральная функц я |
меет первообразную, а также невозможно |
|||||||
вычислить интеграл от таблично заданной функции.
Геометрический смысл определенного интеграла – это площадь криволинейной трапеции, ограниченной осью ОХ, кривой f(x) и прямыми x=a, и x=b (рис. 10.1).
36

|
И |
|
Рис. 10.1. Геометрический смысл определенного интеграла |
Отрезок [a; b] делят на n частей с шагом интегрирования h = (b – |
|
– a)/n . |
Д |
|
|
Площадь искомой криволинейной трапеции вычисляется как |
|
сумма площадей (n-1), элементарных трапеции. |
|
Численные методы интегрирования основаны на различных |
|
способах вычисления этих элементарных площадей. |
|
|
и |
|
10.1. МетодАпрямоугольников |
|
С |
1. Формула левых прямоугольниковб |
|
Суть метода левых прямоугольников заключается в том, что |
|
подынтегральную функцию у=f(x) заменяют на каждом отрезке [xi; |
|
xi+1] прямой y=f(xi). Площадь |
i-й элементарной трапеции Si |
вычисляется по формуле (10.2) как площадь прямоугольника со сторонами h=xi+1 – xi и f(xi) (рис. 10.2).
b |
|
f (x0 ) h + f (x1) h +... + f (xn−1) h ≈ h |
n−1 |
|
S ≈ ∫ |
f (x)dx ≈ |
∑ |
f (xi ) (10.2) |
|
a |
|
|
i=0 |
|
37
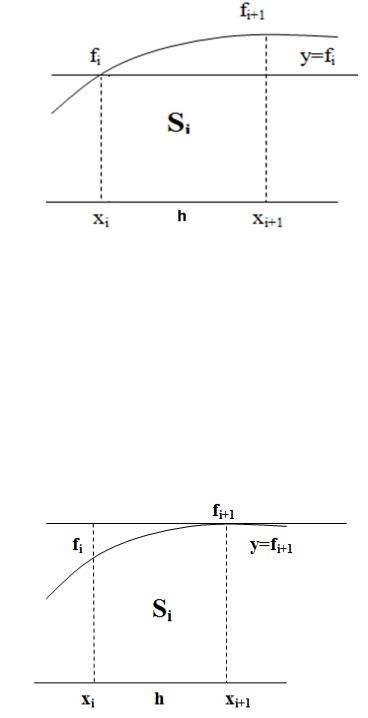
Рис. 10.2. Формула левых прямоугольников |
|
2. Формула правых прямоугольников |
И |
Суть метода правых прямоугольников заключается в том, что |
|
подынтегральную функцию у=f(x) заменяют на каждом отрезке [xi; |
|||||||
xi+1] прямой y=f(xi+1). Площадь |
|
i-й элементарной трапеции Si |
|||||
|
|
|
|
|
Д |
|
|
вычисляется по формуле (10.3) как площадь прямоугольника со |
|||||||
сторонами h=xi+1 – xi и f(xi+1) (рис. 10.3). |
|
|
|||||
b |
|
|
А |
n |
|
||
S ≈ ∫ |
f (x)dx ≈ f (x1) h + f (x2 ) |
h +... + f (xn ) h ≈ h ∑ |
f (xi ) (10.3) |
||||
a |
|
б |
|
i=1 |
|
||
|
|
|
|
|
|
||
|
и |
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
Рис. 10.3. Формула правых прямоугольников
3. Формула центральных прямоугольников Суть метода центральных прямоугольников заключается в том,
что подынтегральную функцию у=f(x) заменяют на каждом отрезке
[xi; xi+1] прямой y=f(xi +h/2), т.е. значением функции в середине i-го отрезка (рис. 10.4).
38

Формула центральных прямоугольников имеет наименьшую погрешность по сравнению с формулами левых и правых прямоугольников:
b |
f (x)dx ≈ h |
n−1 |
f (x |
+ h). |
(10.4) |
S ≈ ∫ |
∑ |
||||
a |
|
i=0 |
i |
2 |
|
|
|
|
Рис. 10.4. Формула центральныхДпрямоугольниковИ
10.2. Метод трапеций
Суть метода заключается в том, что подынтегральную функцию |
||||||
у=f(x) заменяют на каждом отрезкеА[xi; xi+1] прямой, проходящей через |
||||||
точки (xi; f(xi)) и (xi+1; f(xi+1)). Криволинейная трапеция заменяется на |
||||||
С |
|
|
|
|
|
|
обычную трапецию (р с. б10.5), площадь которой может быть найдена |
||||||
как произведение полусуммы оснований на высоту |
|
|||||
иf (x ) + f (x |
) |
|
(10.5) |
|||
|
I = |
i |
i+1 |
|
h. |
|
|
|
2 |
|
|||
|
|
|
|
|
|
|
Рис. 10.5. Формула трапеций
39