3.3 Разработка устройства и метода измерения
3.3.1 Описание принципа действия устройства
На проставленной ниже схеме представлена разработанная конструкция устройства, удовлетворяющая всем представленным требованиям.

Рисунок 15 – Конструкция разработанного устройства
Принцип работы устройства основан на уравновешивании изделия относительно центральной шарнирной опоры. Нахождении координат центра масс изделия осуществляется автоматическим способом (возможен ручной вариант) из решения уравнения статических моментов в состоянии равновесия.
Контролируемое изделие 1 устанавливается на квадратный поворотный стол 3 и базируется в координатный угол, образованный бортами установочной площадки 2. Коромысло 4 в этот момент не уравновешено грузом 10 и опирается датчиком нулевого состояния 6 на демпферную площадку 7, образуя угол крена β ≈ 10°. После осуществления начала измерения оператором начинается процесс балансировки. Для этого привод 11 посредством ШВП отодвигает каретку 10 известной массы на фиксируемое датчиком оборотов двигателя расстояние, необходимое для создания уравновешивающего момента. Датчик 13, закреплённый на опоре 9 имеет два концевых выключателя, сигнализирующих ЭВМ о повороте оси 12 (установочной площадки 4) в положение 0° и -5°. После получения вычислительным устройством данных о положении устройства в заданных углах, привод 11 совершает реверс и приводит каретку 10 в нулевое положение. Получив сигнал от датчика 6 ЭВМ при помощи привода 5 поворачивает изделие 1 на 90° относительно вертикальной оси.
Для осуществления нахождения трёх необходимых координат и массы (если требуется) необходимо повторить измерения ещё в положениях 180° и 270°.
3.3.2 Проектирование и проверка работоспособности конструкции в SolidWorks
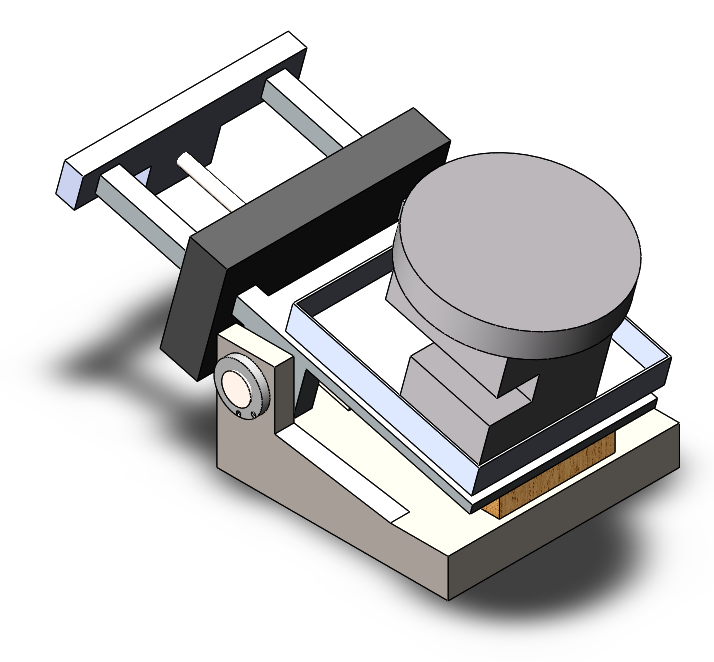
Рисунок 16 – Приспособление в режиме ожидания

Рисунок 17 – Процесс замера центра масс
3.3.3 Теоретическое обоснование метода
В работе [16] проведён анализ задач по теме определения масово-геометрических характеристик (МГХ) по моментно-силовым характеристикам (МСХ) тел и выделены основные особенности решения таких задач:
1. Постоянные во времени МГХ тела определяются на основе заданных или измеренных МСХ и кинематическим характеристикам (КХ) в некоторый фиксированный момент времени.
2. Если количество определяемых постоянных во времени МГХ тела больше количества описывающих его движение уравнений динамики, то следует «набрать» необходимое количество уравнений, характеризующих движение тела в разные фиксированные моменты времени, но при этом необходимо показать существование и единственность решения полученной системы уравнений относительно неизвестных МГХ тела. В частности, для системы линейных алгебраических уравнений потребуется условие отличия от нуля её определителя в случае неоднородной системы с количеством уравнений, равным количеству неизвестных.
3. В реальных задачах, когда аналитические решения уравнений динамики тела получить не удаётся, следует составить алгоритм численного определения МГХ на основе уравнений динамики тела при заданных или измеренных МСХ и КХ путём интегрирования этих уравнений и затем решения полученных уравнений относительно МГХ тела для фиксированного момента времени с учётом п.2.
4. Указанную в п.2 процедуру определения постоянных во времени МГХ тела в разные моменты времени его движения можно использовать и для случая одноимённых МГХ в эти моменты времени, то есть для получения нескольких численных значений одних и тех же МГХ. Определив численными методами эти МГХ тела для нескольких моментов времени и получив в общем случае отличающиеся друг от друга значения одноимённых МГХ в силу имеющихся погрешностей численных методов, следует затем найти их средние арифметические значения, которые приять в качестве искомых МГХ.
5. Для определения переменных во времени МГХ тела необходимо использовать описывающие его движение дифференциальные уравнения динамики, переписав эти уравнения относительно неизвестных МГХ, которые будут решениями полученных уравнений при заданных МСХ и КХ тела и значений его МГХ в начальный момент времени.
3.3.4 Вывод формулы для определения координат на устройстве
Таким образом на первоначальном этапе для создания математической модели и последующей обработки результатов полученных устройством значений необходимо нарисовать схему действия статических моментов сил (рис. 18).

(9)
Полученная система уравнений позволит найти искомые координаты:

где m – известная масса противовеса, кг;
М – масса изделия, кг;
L21,22,23,24,25,26,27,28 – расстояния плеч до противовеса, мм;
L11,12 – известное конструктивное расстояния до базовой поверхности, мм;
g – постоянная ускорения свободного падения, м/с2;
S1,2 – величины смещения вертикальной координаты в горизонтальной плоскости, в зависимости от приданого угла α = 5°, мм.
Упростим выражение, приняв X=(L11,12 - l1); Xα =(L11,12 - l1+ S1,2); Y=(L11,12 – l2).
Решая систему уравнений сокращается постоянная ускорения свободного падения g.
(10)
(11)
(12)
(13)